FAST(Features from Accelerated Segment Test)角检测算法原理详解和C++代码实现
FAST(Features from Accelerated Segment Test)是一种经典的角点检测算法,由 Edward Rosten 和 Tom Drummond 于 2006 年提出,设计目标是:以极高速度检测出图像中的角点特征,特别适合实时系统(如 SLAM、视觉里程计、跟踪等)。
一、FAST 算法基本原理
1.1 核心思想:加速段测试(Segment Test)
对于图像中一个像素点 p p p,以其为中心画一个半径为 3 的圆(即 Bresenham circle,包含 16 个像素点),判断其是否为角点:
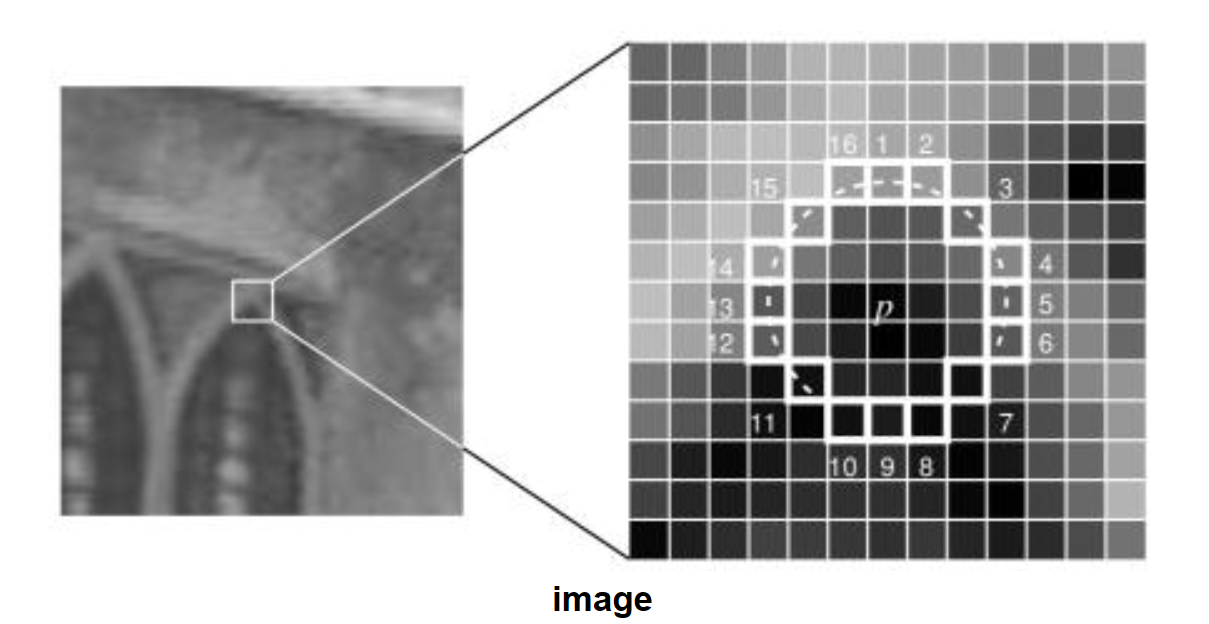
**定义:像素 p p p 是角点,当且仅当圆上的至少 n 个连续像素(n 一般为 12)**满足以下条件之一:
- 比 p p p 的像素值亮很多: I x ≥ I p + t I_x \geq I_p + t Ix≥Ip+t
- 比 p p p 的像素值暗很多: I x ≤ I p − t I_x \leq I_p - t Ix≤Ip−t
其中:
- I p I_p Ip:中心点像素值
- I x I_x Ix:圆上某个点的像素值
- t t t:阈值(contrast threshold)
1.2 加速策略:提前淘汰(Early Rejection)
为了避免对所有 16 个点逐一判断,FAST 引入了加速判断机制:
- 先测试圆上的固定 4 个点(1、5、9、13 号位置),若至少有 3 个点与中心像素强烈不同(大于 t 的对比度差),才继续完整测试 16 点;
- 否则直接淘汰。
这一步骤大幅减少了不必要的计算,提高了角点检测效率。
二、数学公式与推导
2.1 圆上像素坐标公式(以 p = ( x , y ) p = (x, y) p=(x,y) 为中心):
圆上的 16 个像素相对坐标如下:
| 位置 | dx | dy |
|---|---|---|
| 1 | 0 | -3 |
| 2 | 1 | -3 |
| 3 | 2 | -2 |
| 4 | 3 | -1 |
| 5 | 3 | 0 |
| 6 | 3 | 1 |
| 7 | 2 | 2 |
| 8 | 1 | 3 |
| 9 | 0 | 3 |
| 10 | -1 | 3 |
| 11 | -2 | 2 |
| 12 | -3 | 1 |
| 13 | -3 | 0 |
| 14 | -3 | -1 |
| 15 | -2 | -2 |
| 16 | -1 | -3 |
表示第 k k k 个圆点:
p k = ( x + Δ x k , y + Δ y k ) p_k = (x + \Delta x_k, y + \Delta y_k) pk=(x+Δxk,y+Δyk)
2.2 角点判断公式
定义亮度差阈值 t t t,对于圆上第 k k k 个像素点,定义:
d k = I ( p k ) − I ( p ) d_k = I(p_k) - I(p) dk=I(pk)−I(p)
则角点判定条件为:
-
存在一段长度为 n n n 的连续子序列 { d k } \{ d_k \} {dk},使得:
- 全部满足 d k > t d_k > t dk>t (亮)
- 或全部满足 d k < − t d_k < -t dk<−t(暗)
FAST 最常用的是 n = 12 n = 12 n=12。
三、非 OpenCV 的纯实现思路
可以使用如下伪代码进行实现:
bool is_corner(const cv::Mat& img, int x, int y, int t) {static const int offset[16][2] = {{0,-3}, {1,-3}, {2,-2}, {3,-1}, {3,0}, {3,1}, {2,2}, {1,3},{0,3}, {-1,3}, {-2,2}, {-3,1}, {-3,0}, {-3,-1}, {-2,-2}, {-1,-3}};int Ip = img.at<uchar>(y, x);int count_bright = 0, count_dark = 0;// early rejection (positions: 1, 5, 9, 13)int check[4] = {0, 4, 8, 12};int pass = 0;for (int i = 0; i < 4; ++i) {int dx = offset[check[i]][0], dy = offset[check[i]][1];int val = img.at<uchar>(y + dy, x + dx);if (val > Ip + t || val < Ip - t) pass++;}if (pass < 3) return false;// full segment testfor (int i = 0; i < 16; ++i) {count_bright = count_dark = 0;for (int j = 0; j < 12; ++j) {int idx = (i + j) % 16;int dx = offset[idx][0], dy = offset[idx][1];int val = img.at<uchar>(y + dy, x + dx);if (val > Ip + t) count_bright++;else if (val < Ip - t) count_dark++;else break;if (count_bright == 12 || count_dark == 12) return true;}}return false;
}
可以将其嵌入图像遍历过程中,检测角点。
四、纯C++代码实现
// FAST Corner Detector with BMP Loading and Non-Maximum Suppression
// By YZS
// Date Time 3th.April 2025#include <iostream>
#include <vector>
#include <cmath>
#include <cstdint>
#include <fstream>
#include <algorithm>struct Point {int x, y;uint8_t score;
};class GrayImage {
public:int width, height;std::vector<uint8_t> data;bool loadBMP(const std::string& filename) {std::ifstream file(filename, std::ios::binary);if (!file) return false;uint8_t header[54];file.read(reinterpret_cast<char*>(header), 54);width = *reinterpret_cast<int32_t*>(&header[18]);height = *reinterpret_cast<int32_t*>(&header[22]);int offset = *reinterpret_cast<int32_t*>(&header[10]);int row_padded = (width * 3 + 3) & (~3);data.assign(width * height, 0);file.seekg(offset);for (int i = height - 1; i >= 0; --i) {std::vector<uint8_t> row(row_padded);file.read(reinterpret_cast<char*>(row.data()), row_padded);for (int j = 0; j < width; ++j) {uint8_t r = row[j * 3 + 2];uint8_t g = row[j * 3 + 1];uint8_t b = row[j * 3];data[i * width + j] = static_cast<uint8_t>(0.299 * r + 0.587 * g + 0.114 * b);}}return true;}uint8_t& at(int x, int y) {return data[y * width + x];}
};const int circle_offsets[16][2] = {{0, -3}, {1, -3}, {2, -2}, {3, -1},{3, 0}, {3, 1}, {2, 2}, {1, 3},{0, 3}, {-1, 3}, {-2, 2}, {-3, 1},{-3, 0}, {-3, -1},{-2, -2},{-1, -3}
};bool isCorner(const GrayImage& img, int x, int y, int threshold, uint8_t& score) {int Ip = img.at(x, y);int brighter = 0, darker = 0;int test_idx[4] = {0, 4, 8, 12};int passed = 0;for (int i : test_idx) {int dx = circle_offsets[i][0], dy = circle_offsets[i][1];int val = img.at(x + dx, y + dy);if (val >= Ip + threshold || val <= Ip - threshold)++passed;}if (passed < 3) return false;int max_score = 0;for (int i = 0; i < 16; ++i) {int count_bright = 0, count_dark = 0;for (int j = 0; j < 12; ++j) {int idx = (i + j) % 16;int dx = circle_offsets[idx][0], dy = circle_offsets[idx][1];int val = img.at(x + dx, y + dy);if (val >= Ip + threshold) ++count_bright;else if (val <= Ip - threshold) ++count_dark;else break;}if (count_bright == 12 || count_dark == 12) {max_score = std::max(max_score, std::abs(Ip - img.at(x + circle_offsets[i][0], y + circle_offsets[i][1])));}}score = static_cast<uint8_t>(max_score);return max_score > 0;
}std::vector<Point> nonMaximumSuppression(const std::vector<Point>& corners, int radius) {std::vector<Point> result;for (const auto& p : corners) {bool is_max = true;for (const auto& q : corners) {if (q.x == p.x && q.y == p.y) continue;if (std::abs(q.x - p.x) <= radius && std::abs(q.y - p.y) <= radius) {if (q.score > p.score) {is_max = false;break;}}}if (is_max) result.push_back(p);}return result;
}int main() {GrayImage img;if (!img.loadBMP("test.bmp")) {std::cerr << "Failed to load BMP image.\n";return 1;}int threshold = 20;std::vector<Point> corners;for (int y = 3; y < img.height - 3; ++y) {for (int x = 3; x < img.width - 3; ++x) {uint8_t score = 0;if (isCorner(img, x, y, threshold, score)) {corners.push_back({x, y, score});}}}auto nms_corners = nonMaximumSuppression(corners, 3);std::cout << "Detected " << nms_corners.size() << " corners after NMS.\n";for (auto& p : nms_corners) {std::cout << "Corner: (" << p.x << ", " << p.y << ") Score: " << (int)p.score << "\n";}return 0;
}
五、FAST 优缺点
优点
- **极快:**每个像素只需处理极少量比较运算
- 适用于实时系统
- 易于实现,无需复杂数学
缺点
- 无方向信息(需要后续 Harris 或 Shi-Tomasi 等加权评分)
- 对噪声较敏感
- 不具备尺度不变性(如 SIFT)
六、优化与扩展
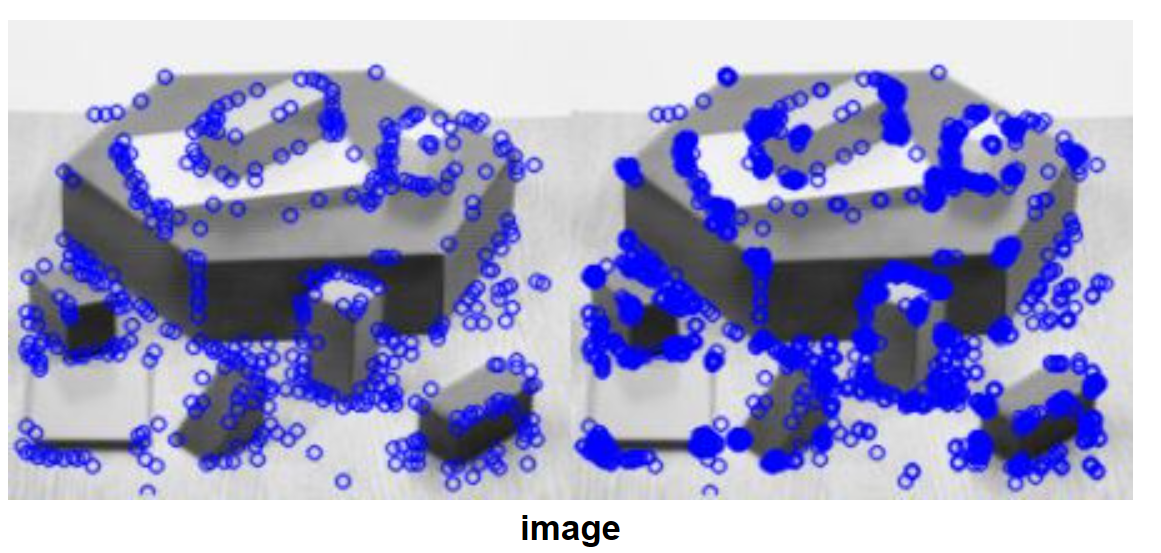
- FAST + Non-max Suppression(非极大值抑制): 保留最强响应点
- FAST + Harris 评分: 提高角点稳定性
- FAST-ER(机器学习优化的版本)
- ORB 特征: 基于 FAST + BRIEF 描述子 + orientation vector