齐次变换矩阵与运动旋量的指数映射
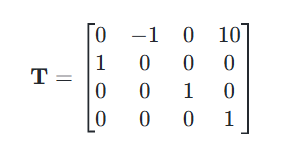
在三维空间中,刚体的位姿(位置和姿态)可以通过齐次变换矩阵进行描述。齐次变换矩阵是一种 4×4 的矩阵,其一般形式为:
T = [ R p 0 1 ] T=\begin{bmatrix}R&p\\0&1\end{bmatrix} T=[R0p1]
其中, R R R是一个 3×3 的旋转矩阵,用于描述刚体的姿态变化; p p p 是一个 3×1 的位置矢量,用于描述刚体的位置变化;0 是一个 1×3 的零行矢量;1 是一个标量,用于齐次坐标变换。
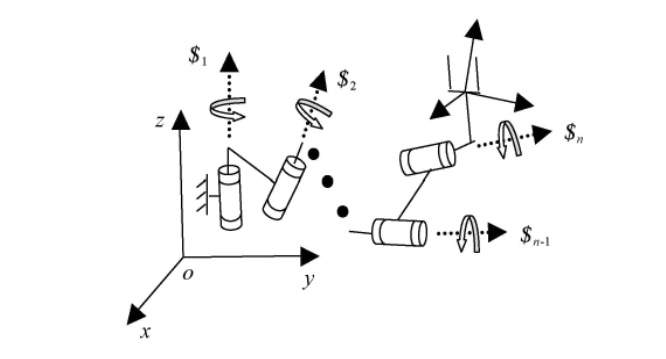
为了更深入地理解和操作刚体的运动,我们引入了运动旋量和指数映射的概念。运动旋量 ξ ^ \hat{\xi} ξ^ 是一个 6 维矢量,包含线速度 v v v 和角速度 ω \omega ω,表示为:
ξ ^ = [ v ω ] ∧ = [ ω ^ v 0 0 ] \hat{\xi}=\begin{bmatrix}v\\\omega\end{bmatrix}^\wedge=\begin{bmatrix}\hat{\omega}&v\\0&0\end{bmatrix} ξ^=[vω]∧=[ω^0v0]
其中, ω ^ \hat{\omega} ω^ 是角速度矢量对应的反对称矩阵。
指数映射 e ξ ^ θ e^{\hat{\xi}\theta} eξ^θ 将李代数(运动旋量)映射到李群(齐次变换矩阵),即从运动旋量生成对应的齐次变换矩阵:
T = e ξ ^ θ T=e^{\hat{\xi}\theta} T=eξ^θ
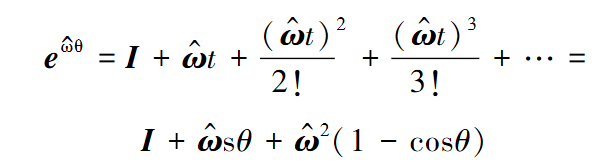
为了推导这个公式,我们需要利用泰勒级数展开和矩阵幂运算的性质。指数映射的展开形式如下:
T = e ξ ^ θ = [ e ω ^ θ ( I − e ω ^ θ ) ( ω × v ) + ω ω T v θ 0 1 ] T=e^{\hat{\xi}\theta}=\begin{bmatrix}e^{\hat{\omega}\theta}&(I-e^{\hat{\omega}\theta})(\omega\times v)+\omega\omega^T v\theta\\0&1\end{bmatrix} T=eξ^θ=[eω^θ0(I−eω^θ)(ω×v)+ωωTvθ1]
其中,旋转部分 e ω ^ θ e^{\hat{\omega}\theta} eω^θ 可以通过罗德里格斯公式展开得到旋转矩阵;平移部分则结合了旋转和平移的效果,通过展开指数映射并整理得到。
为了验证和理解这个公式,我们可以使用 Sympy 来构造和计算这个过程。以下是完整的代码示例:
from sympy import symbols, Matrix, eye, sin, cos, sqrt# 定义符号变量
theta = symbols('theta')
omega_x, omega_y, omega_z = symbols('omega_x omega_y omega_z')
v_x, v_y, v_z = symbols('v_x v_y v_z')omega = Matrix([omega_x, omega_y, omega_z])
v = Matrix([v_x, v_y, v_z])# 构造角速度矢量对应的反对称矩阵
omega_hat = Matrix([[0, -omega_z, omega_y],[omega_z, 0, -omega_x],[-omega_y, omega_x, 0]])# 构造旋转矩阵(罗德里格斯公式)
omega_norm = sqrt(omega_x**2 + omega_y**2 + omega_z**2)
R = eye(3) + sin(omega_norm * theta) * (omega_hat / omega_norm) + (1 - cos(omega_norm * theta)) * (omega_hat**2 / omega_norm**2)# 构造平移部分
I = eye(3)
term1 = (I - R) * (omega.cross(v))
term2 = omega * omega.dot(v) * theta
p = term1 + term2# 构造齐次变换矩阵
T = Matrix([[R[0,0], R[0,1], R[0,2], p[0]],[R[1,0], R[1,1], R[1,2], p[1]],[R[2,0], R[2,1], R[2,2], p[2]],[0, 0, 0, 1]])print("齐次变换矩阵 T:")
print(T)
这段代码首先定义了必要的符号变量,包括角度参数 θ \theta θ、角速度矢量 ω \omega ω 和线速度矢量 v v v。然后,构造了角速度矢量的反对称矩阵 ω ^ \hat{\omega} ω^。接着,利用罗德里格斯公式构造了旋转矩阵 e ω ^ θ e^{\hat{\omega}\theta} eω^θ。平移部分通过结合旋转矩阵和平移矢量 (v) 计算得到。最后,将旋转和平移部分组合成齐次变换矩阵 T T T 并打印输出。
通过这个代码示例,我们可以看到如何利用 Sympy 来构造和计算齐次变换矩阵的指数映射。这种计算方法为我们理解和操作刚体在三维空间中的运动提供了一个强有力的工具。
在实际应用中,齐次变换矩阵和指数映射的概念在机器人学、计算机视觉和三维计算机图形学等领域有着广泛的应用。例如,机器人学中通过齐次变换矩阵来描述机器人关节的运动,以及通过指数映射来规划和控制机器人的运动轨迹。这些数学工具为我们提供了一种精确和高效的方式来表示和操作刚体的运动,推动了相关领域的发展和创新。