汽车安全:功能安全FuSa、预期功能安全SOTIF与网络安全Cybersecurity 解析
汽车安全的三重防线:深入解析FuSa、SOTIF与网络安全技术
现代汽车已成为装有数千个传感器的移动计算机,安全挑战比传统车辆复杂百倍。
随着汽车智能化、网联化飞速发展,汽车电子电气架构已从简单的分布式控制系统演变为复杂的移动计算平台。现代车辆包含上百个电子控制单元(ECU),通过车内网络紧密相连,同时与外部环境保持实时通信。
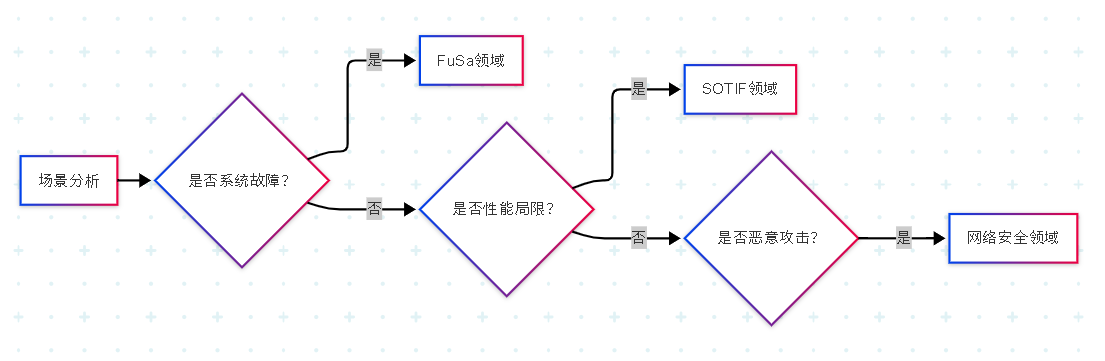
这种技术演进带来了三类关键安全挑战:功能安全(FuSa)、预期功能安全(SOTIF)和网络安全——它们共同构成了智能汽车的安全基石。
本文将深入解析这三重安全防线的技术原理与实施策略,并通过行业实例揭示它们如何协同保障未来出行安全。
01:汽车电子电气架构的演进与安全新挑战
十年前,汽车电子系统相互独立;如今,它们已深度融合为复杂的计算网络。一辆现代智能汽车包含超过1亿行代码,是波音787梦想飞机的16倍还多。
这些系统通过多种总线协议(如CAN、LIN、以太网)连接,同时借助5G/V2X、蓝牙、Wi-Fi等技术实现车云互联。架构的复杂性带来了前所未有的安全挑战:
- 功能安全风险:电子系统随机故障或系统性失效可能导致危险事件。例如,刹车控制模块的失效可能直接引发碰撞事故。
- 预期功能安全不足:即使所有部件工作正常,系统在面对未训练场景时仍可能表现不佳。一辆在加州训练的自动驾驶汽车突遇北京沙尘暴时可能“不知所措”。
- 网络攻击面扩大:研究表明,现代车辆拥有超过300个潜在攻击入口,从OBD接口到车载信息娱乐系统,再到无线充电协议都可能成为黑客突破口。
特斯拉在2023年报告显示,其车辆每天平均遭受12.5次网络安全攻击尝试,比2020年增加300%。
汽车安全已从机械时代的“物理防护”转变为电子时代的“三位一体”防护体系——FuSa、SOTIF和网络安全必须协同工作,才能确保智能汽车的安全运行。
02:功能安全(FuSa):预防随机故障的基石
功能安全的核心目标
功能安全(Functional Safety,简称FuSa)关注的是当电子电气系统发生随机硬件故障或系统性失效时,如何避免引发危险事件。简单来说,它解决的是“系统故障时如何确保安全”的问题。
ISO 26262标准将功能安全流程归纳为:危害分析→风险评估→安全目标→技术方案。其核心工具是ASIL(汽车安全完整性等级)评估,根据严重度(S)、暴露率(E)和可控性(C)将安全要求分为QM、A、B、C、D五个等级,其中D级要求最严格。
行业实践与案例
案例1:电子助力转向系统(EPS)
当EPS控制单元检测到内部故障(如扭矩传感器异常),会立即启动安全机制:
- 仪表盘显示红色警告灯
- 逐渐增加转向力度使驾驶员接管
- 如驾驶员未响应,系统触发紧急车道保持并安全停车
案例2:博世的ESP®控制系统
采用双核锁步架构(Dual-Core Lockstep)满足ASIL D要求:两个处理器同时执行相同指令并比较结果。当检测到不一致时,系统在毫秒级时间内切换到安全状态。
ASIL等级要求对比
表:ISO 26262 ASIL等级安全要求差异
| 要求项目 | ASIL A | ASIL B | ASIL C | ASIL D |
|---|---|---|---|---|
| 单点故障度量 | ≥90% | ≥97% | ≥99% | ≥99% |
| 潜在故障度量 | ≥60% | ≥80% | ≥90% | ≥90% |
| 硬件随机失效目标 | 10⁻⁵ | 10⁻⁶ | 10⁻⁷ | 10⁻⁸ |
| 设计验证方法 | 模块测试 | +集成测试 | +背靠背测试 | +形式化验证 |
数据显示,满足ASIL D要求的系统开发成本比QM级高出4-6倍,验证周期延长约60%。
03:预期功能安全(SOTIF):当系统“正常”却依然不安全
认识SOTIF的本质区别
SOTIF(Safety of the Intended Functionality)解决的是功能安全“覆盖不到”的领域——系统无故障,却因性能局限导致危险。典型场景包括:
- 传感器误识别(如将卡车的白色货厢误判为天空)
- 算法在极端天气下失效(浓雾中漏检行人)
- 人机交互设计缺陷(自动驾驶系统退出时未给驾驶员足够接管时间)
ISO/PAS 21448标准明确定义:SOTIF关注已知不足场景(已知不安全)和未知不安全场景。
技术挑战与应对策略
感知局限突破方案:
- 特斯拉的“伪影识别网络”:通过生成对抗网络(GAN)模拟雨雾中的障碍物,提升摄像头在低可视环境下的识别能力
- 多模态传感器融合:Waymo第五代系统将激光雷达、摄像头和毫米波雷达数据在特征级而非决策级融合,显著降低单一传感器失效风险
SOTIF开发四步法:
验证挑战:
要证明“系统在所有可能场景下安全”,理论上需要测试数十亿公里——这显然不现实。行业正通过加速场景测试法突破瓶颈:
- 使用CARLA、SVL等仿真平台构建极端场景
- 基于自然驾驶数据(NDS)挖掘角点案例
- 应用强化学习自动生成挑战性场景
奔驰的SOTIF验证平台每天在云端模拟超过100万公里虚拟里程,识别出0.02%的潜在危险场景。
04:汽车网络安全:数字世界的防护盾
汽车网络安全威胁全景
现代汽车面临三层攻击面:
- 外部接口:T-Box、蓝牙、胎压监测
- 车内网络:CAN总线、以太网
- 后端服务:OTA更新、远程诊断
黑客攻击路径示例:
2024年某车企漏洞测试显示,通过恶意充电桩入侵车辆网络的成功率高达31%,可篡改电池管理系统参数导致热失控。
创新防护技术解析
1. 汽车AI防火墙
新一代防火墙采用轻量级密码术,每秒处理超过1000条车内数据,实现实时异常检测。其核心技术包括:
- 对称加密算法优化:在资源受限的ECU上实现高性能加密,比传统算法能耗降低30-40%
- 异常流量识别模型:基于LSTM网络建立正常通信基线,检测0.01秒级异常报文
- 硬件安全模块(HSM):为关键ECU提供密钥存储和加密运算保护
图:汽车网络安全纵深防御体系
[ 云服务安全 ] ←加密→ [ 车联网通信安全 ] ↑ ↑
[ 安全OTA更新 ] [ 网关防火墙 ] ↑
[ 安全启动 ] ←验证→ [ ECU1 | ECU2 | ... ]
2. 入侵检测系统(IDS)创新
- CAN总线指纹技术:利用ECU时钟偏移特征识别假冒节点,准确率超99.2%
- 负载语义分析:检测刹车指令值是否超出物理可能范围(如0.5g→1.2g突变)
3. 轻量级加密实战
在充电场景应用示例:
# 车辆与充电桩建立安全会话
def establish_secure_session(vehicle, charger):# 轻量级密钥交换session_key = lightweight_key_exchange(vehicle.pub_key, charger.pub_key)# 加密充电参数encrypted_params = encrypt(vehicle.charging_profile, session_key)# 发送并验证完整性if verify_integrity(encrypted_params, session_key):charger.execute_charging(encrypted_params)
该方案在瑞萨RH850芯片上运行仅需3.2ms,满足实时性要求。
05:三重安全的协同之道
融合挑战与技术突破
FuSa、SOTIF与网络安全在实践中常存在目标冲突:
- 安全与实时性矛盾:严格的加密增加网络延迟,可能影响功能安全响应时间
- 资源竞争:运行安全监控占用计算资源,减少主功能可用资源
- 设计复杂性:三重安全要求导致系统架构复杂度指数级增长
协同方案创新:
-
安全机制融合设计
大陆集团推出“安全融合控制器”:单个硬件模块集成- ASIL D功能安全监控
- 网络入侵检测引擎
- SOTIF场景监控接口
-
跨领域分析方法
- 统一验证平台
ETAS推出LABS安全验证平台,可同步注入:- 硬件故障(FuSa)
- 极端场景(SOTIF)
- 网络攻击(网络安全)
表:三重安全协同工作原则
| 安全维度 | 核心关注点 | 协同策略 | 典型冲突解决 |
|---|---|---|---|
| 功能安全 | 随机故障 | 安全状态机制 | 网络安全机制不得延迟安全响应超过10ms |
| SOTIF | 性能局限 | ODD动态监控 | 传感器受攻击时需区分网络威胁与性能局限 |
| 网络安全 | 恶意攻击 | 纵深防御 | 加密开销需控制在ECU可用资源20%以内 |
06:未来趋势与行业展望
汽车安全技术正迎来三大革命性变化:
1. AI驱动的安全防护升级
- 自愈式安全架构:车辆自动分析攻击特征并生成防护补丁,大众集团测试显示响应时间比OTA更新快87%
- SOTIF场景自动生成:生成对抗网络创建极端场景,提升系统鲁棒性
2. 量子安全密码学落地
面对量子计算威胁,行业正推进:
- 基于格的轻量级密码算法:NIST标准化算法在车用芯片的移植
- 后量子安全OTA协议:大陆集团计划2026年量产应用
3. 法规协同加速
- UNECE R155/R156:强制要求网络安全与软件更新管理体系
- ISO 21434+26262+21448融合指南:预计2026年发布统一实施框架
到2030年,三重安全防护将占整车BOM成本12%,但可降低39%的交通事故率——这是技术与生命的价值平衡。下一篇:汽车安全 2030 预测 (功能安全FuSa、预期功能安全SOTIF、网络安全CyberSecurity):成本、效益与行业影响
汽车安全技术正以超越摩尔定律的速度进化。当一辆L4级自动驾驶汽车在上海晚高峰中流畅穿行,背后是功能安全机制确保制动系统零失效,SOTIF技术预判突然横穿的外卖车轨迹,网络安全防火墙拦截来自路边恶意广告牌的入侵尝试——三者的完美协同。
随着智能汽车向“轮上超级计算机”演进,FuSa、SOTIF和网络安全的技术融合将不再只是工程选项,而是决定产业成败的关键支柱。只有跨越这三重安全维度,才能真正实现“零事故”的未来交通愿景。
参考资料:
https://www.jiamisoft.com/blog/38779-qcfhq.html