【航天远景 MapMatrix 精品教程】08 Pix4d空三成果导入MapMatrix
【航天远景 MapMatrix 精品教程】08 Pix4d空三成果导入MapMatrix
文章目录
- 【航天远景 MapMatrix 精品教程】08 Pix4d空三成果导入MapMatrix
- 一、资料准备
- 1.去畸变影像
- 2.相机文件
- 3.外方位元素
- 二、创建工程
- 1.新建工程
- 2.导入照片
- 3.编辑相机文件
- 4.编辑外方位元素文件,导入外方位元素
- 5.创建立体相对,新建DLG
一、资料准备
1.去畸变影像
使用pix4d空三完成后,输出未畸变图片。

2.相机文件
_calibrated_internal_camera_parameters.cam 文件
3.外方位元素
_calibrated_external_camera_parameters.txt文件
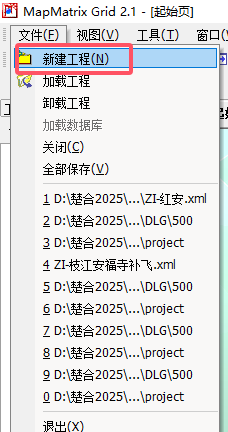
二、创建工程
1.新建工程