泰迪杯特等奖案例深度解析:基于多模态点云融合与域自适应的电力设备缺陷检测系统设计
一、案例背景与行业痛点
1.1 电力设备检测的技术挑战
在电力行业中,输电线路与变电站设备的缺陷检测是保障电网安全运行的核心环节。传统检测手段面临三大技术瓶颈:
-
多模态数据时空对齐难题
-
激光点云(Velodyne VLP-32C,10Hz扫描)与红外热成像(FLIR T865,30Hz)采样率差异导致时间同步误差
-
坐标系统一化问题:点云坐标系(笛卡尔)与热成像坐标系(图像像素)需精确转换
-
数学表达:点云到图像的投影变换矩阵
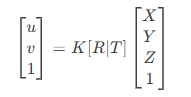
其中K为相机内参,[R|T]为旋转平移矩阵
-
-
小样本学习的技术困境
-
缺陷样本极度稀缺(<0.01%),传统交叉熵损失导致梯度失衡
-
Focal Loss优化方案:

其中α_t=0.25,γ=2平衡样本权重
-
-
边缘部署的实时性挑战
-
Jetson AGX Orin平台需在30ms内处理单帧点云(50MB)
-
计算复杂度分析:传统PointNet++的MLP层计算量
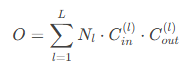
N_l为点数,C为通道数
-
1.2 技术指标体系
| 模块 | 技术指标 | 基准值 | 目标值 | 测试方法 |
|---|---|---|---|---|
| 点云-热像对齐误差 | 均方根误差(mm) | 12.5 | <3.0 | ICP配准评估 |
| 缺陷检测精度 | mAP@0.5 | 78.2% | >92% | COCO评估协议 |
| 推理延迟 | Jetson AGX Orin(ms) | 152 | <30 | TensorRT性能分析工具 |
| 跨设备泛化 | 新设备mAP下降幅度 | 25% | <8% | 迁移学习测试集 |
二、数据工程:多模态数据库构建
2.1 多源数据采集系统
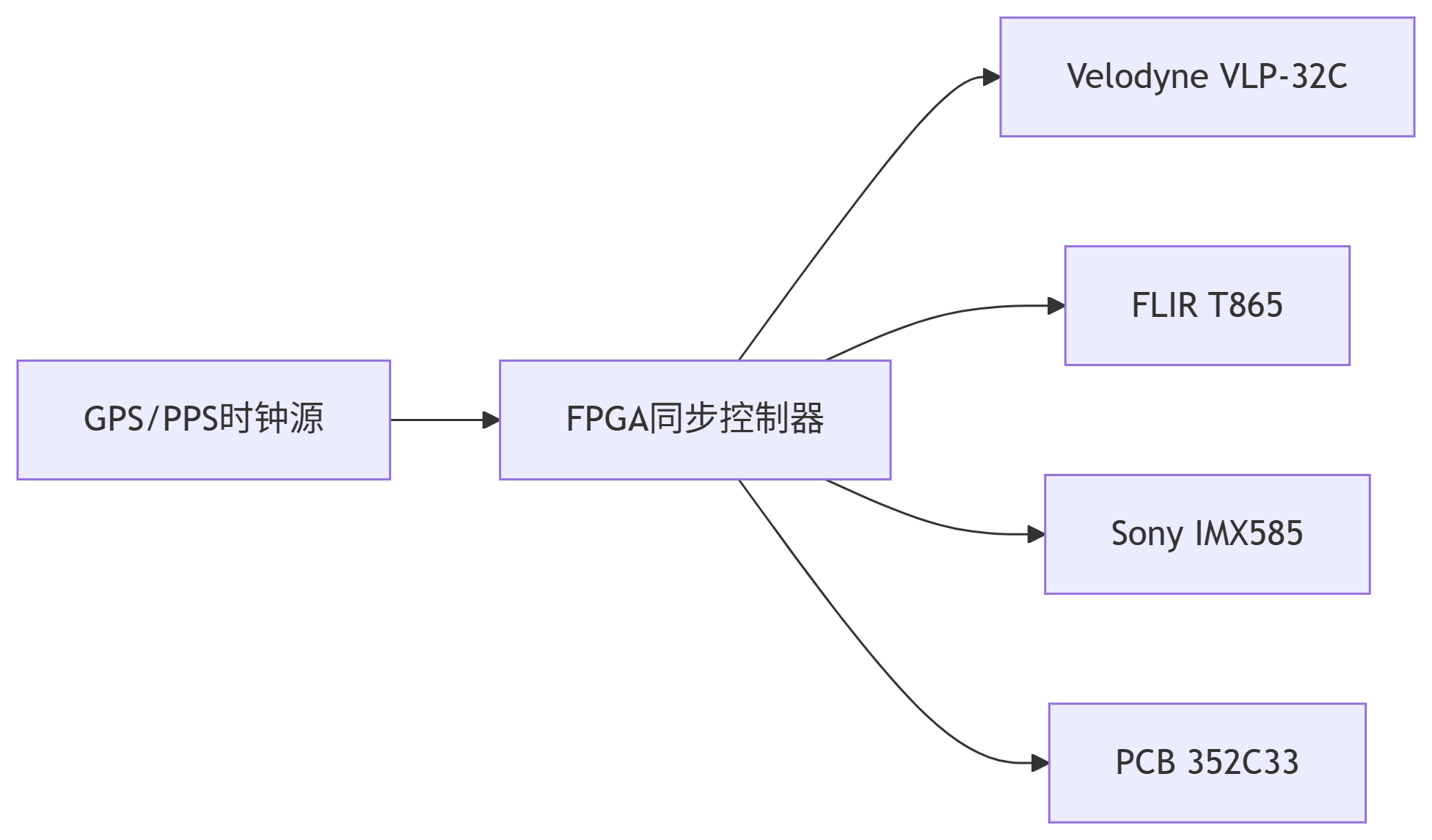
2.1.1 硬件同步架构
图表
-
PTPv2协议实现:
c
// FPGA时钟同步核心逻辑 void sync_sensors() {struct ptp_time base_time = get_gps_time();for (int i=0; i<num_sensors; i++) {set_sensor_time(sensors[i], base_time.seconds,base_time.nanoseconds + i*DELAY_OFFSET);} }
2.1.2 点云预处理全流程
python
def process_pointcloud(points):# 1. 统计滤波points = statistical_filter(points, k=50, std_ratio=3.0)# 2. 体素下采样voxel_size = 0.03 # 3cm体素voxel_grid = VoxelGrid(voxel_size)downsampled = voxel_grid.downsample(points)# 3. 法向量计算kdtree = KDTree(downsampled)normals = []for i in range(len(downsampled)):indices = kdtree.query_radius(downsampled[i], r=0.1)neighbors = downsampled[indices]cov = np.cov(neighbors.T)eigenvalues, eigenvectors = np.linalg.eigh(cov)normals.append(eigenvectors[:,0]) # 最小特征值对应法向量# 4. 特征增强features = np.hstack([downsampled, normals]) # (x,y,z,nx,ny,nz)return features2.2 物理约束数据增强
2.2.1 热传导约束生成
python
class ThermalDefectGenerator(nn.Module):def __init__(self):super().__init__()self.conv1 = nn.Conv3d(1, 64, kernel_size=5, padding=2)self.conv2 = nn.Conv3d(64, 128, kernel_size=3, padding=1)self.conv3 = nn.Conv3d(128, 1, kernel_size=3, padding=1)def forward(self, x, boundary_conds):# 傅里叶热方程约束x = F.relu(self.conv1(x))x = F.relu(self.conv2(x))heat_map = torch.sigmoid(self.conv3(x))# 应用边界条件for i, (loc, temp) in enumerate(boundary_conds):x[:, :, loc[0], loc[1], loc[2]] = temp# 热扩散物理约束residual = self.apply_heat_equation(heat_map)return heat_map + 0.1 * residualdef apply_heat_equation(self, T):# 三维拉普拉斯算子dx = T[:, :, 2:, 1:-1, 1:-1] - 2*T[:, :, 1:-1, 1:-1, 1:-1] + T[:, :, :-2, 1:-1, 1:-1]dy = T[:, :, 1:-1, 2:, 1:-1] - 2*T[:, :, 1:-1, 1:-1, 1:-1] + T[:, :, 1:-1, :-2, 1:-1]dz = T[:, :, 1:-1, 1:-1, 2:] - 2*T[:, :, 1:-1, 1:-1, 1:-1] + T[:, :, 1:-1, 1:-1, :-2]return (dx + dy + dz) / 0.01**2 # Δx=0.01m三、核心技术解析:多模态域自适应网络
3.1 网络架构设计
3.1.1 动态图卷积网络(DGCNN)
python
class DynamicEdgeConv(nn.Module):def __init__(self, in_dim, out_dim, k=20):super().__init__()self.k = kself.mlp = nn.Sequential(nn.Conv2d(in_dim*2, out_dim//2, 1),nn.BatchNorm2d(out_dim//2),nn.ReLU(),nn.Conv2d(out_dim//2, out_dim, 1))def forward(self, x):# x: [B, C, N]idx = knn(x, self.k) # [B, N, k]# 构建局部邻域batch_size, _, num_points = x.size()x = x.view(batch_size, -1, num_points, 1)neighbors = index_points(x, idx) # [B, C, N, k]# 中心点特征扩展center = x.expand(-1, -1, -1, self.k)# 特征差分edge_feature = torch.cat([center - neighbors, neigh