第六章 Freertos智能小车循迹模块
本文是【Freertos实战】智能小车的最后一个模块"循迹模块"。当手机APP切换到循迹模式下,小车会循黑线,不断走动。如果是突然跳转看到这篇的朋友们,可以通过这篇文章进行跳转回顾前期的内容:【Freertos实战】零基础制作基于stm32智能小车
1.循迹模块寻迹模块TCRT5000
模块简介
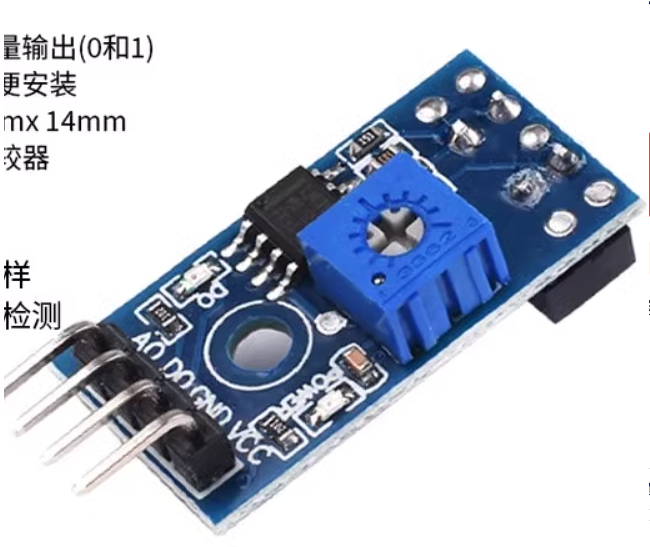
TCRT5000是一款基于红外对管(红外发射管 + 红外接收管)的低成本循迹 / 避障模块,广泛应用于机器人循迹小车、智能车等场景。其核心原理是利用红外光在不同颜色表面(如黑白线)的反射率差异,检测障碍物或轨迹线条,输出数字信号供单片机处理。
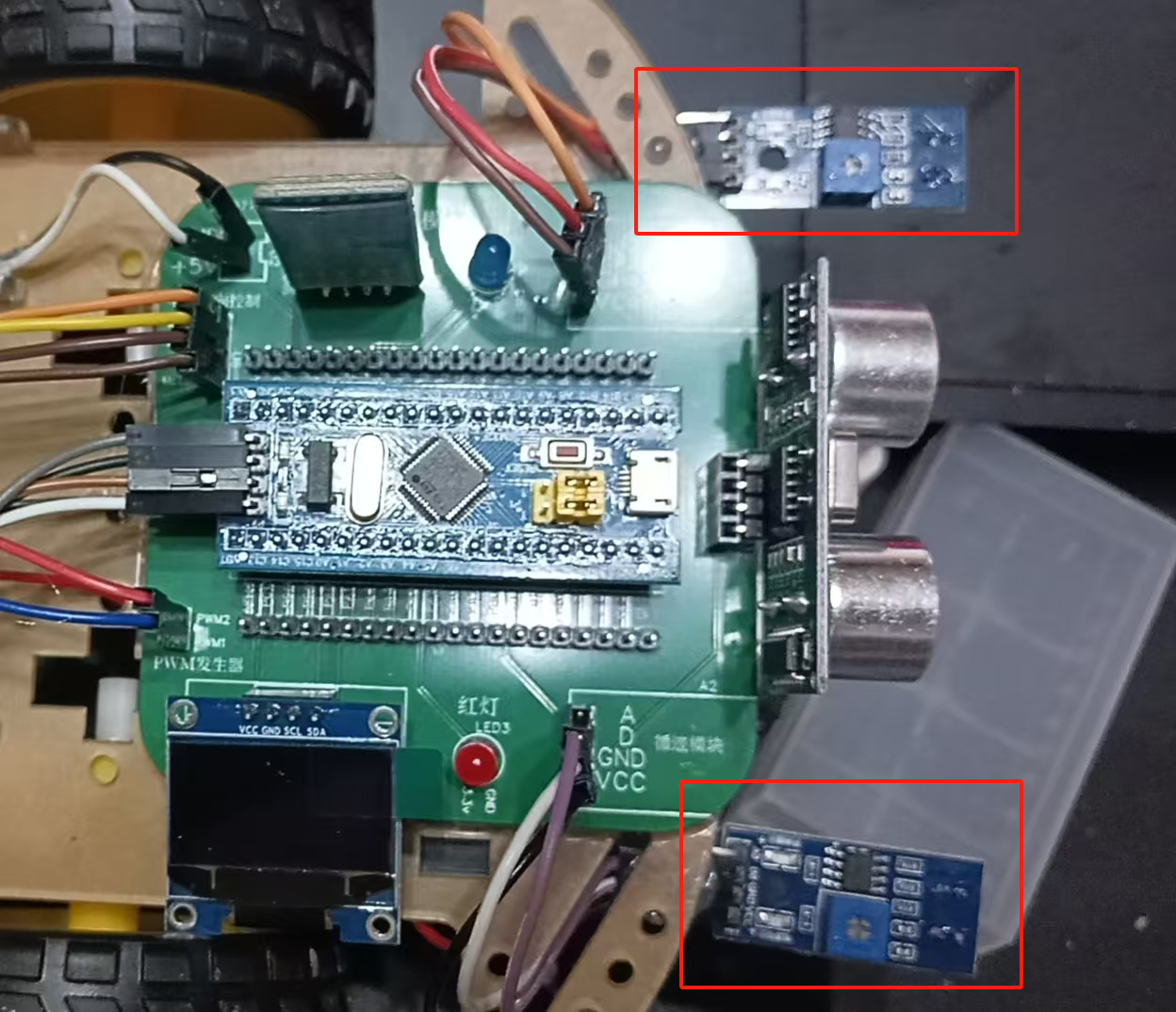
选取两个该循迹模块,分别用热熔枪固定在小车的两侧 ,当左侧模块检测到黑线:小车右转调整。当右侧模块检测到黑线:小车左转调整。
接线方式
| TCRT5000 引脚 | 单片机(STM32) |
|---|---|
| VCC | 5V 或 3.3V(需确认模块兼容电压) |
| GND | GND |
| DO | GPIO 引脚(左侧循迹模块接PB4、右侧循迹模块接PB5) |
| AO | 悬空 |
硬件程序设计
#ifndef __SENSOR_H
#define __SENSOR_Htypedef struct Get_Sensor{int Left;int Right;
}Sensor;void Sensor_Init(void);
void Sensor_GetNum(Sensor *temp);#endif将PB4、PB5引脚置为上拉输入,同时在Sensor_GetNum传入指针,来获取两个循迹传感器的状态,从而配合电机控制完成循迹的效果
#include "stm32f10x.h" // Device header
#include "Sensor.h"void Sensor_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);
}void Sensor_GetNum(Sensor *temp)
{temp->Left = GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_4);temp->Right = GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_5);
}
2.主程序逻辑
#include "Sensor.h"//循迹/*
*************************************************************************
* 全局变量
*************************************************************************
*//*获取循迹传感器的状态,只在循迹模式下生效*/Sensor sensor;/* 循迹模块 */Sensor_Init();Sensor_GetNum(&sensor);//获取循迹传感器的状态if(sensor.Left == 1 && sensor.Right == 0)//当左循迹传感器有反应时,小车向左转{Motor_Leftward(40);//小车向左转vTaskDelay(70);}else if(sensor.Left == 0 && sensor.Right == 1)//当右循迹传感器有反应时,小车向右转{Motor_Rightward(40);//小车向右转vTaskDelay(70);}else{Motor_Forward(40);//当小车居于中间位置时,前进vTaskDelay(70);}Motor_Stop();