Science Robotics 封面论文:基于形态学开放式参数化的仿人灵巧手设计用于具身操作
人形机械手具有无与伦比的多功能性和精细运动技能,使其能够精确、有力和稳健地执行各种任务。在古生物学记录和动物王国中,我们看到了各种各样的替代手和驱动设计。了解形态学设计空间和由此产生的涌现行为不仅可以帮助我们理解灵巧的作用及其演变,还可以帮助优化设计、实现并最终超越人类的能力。迄今为止,对手部实施的探索一直受到现实世界中定制手灵巧性挑战以及复杂交互模拟中现实差距的限制。
最近,来自瑞士洛桑联邦理工学院和英国剑桥大学的研究团队带来了令人眼前一亮的新思路:不必完全复制人手,可以根据任务需求设计出更有针对性的手型!该成果登上了机器人领域顶刊Science Robotics最新一期的封面。
图片
他们提出了"开放参数化手"(Open Parametric Hand, OPH)设计框架,通过56个可调整参数,可以定制从人手到各种灵长类动物手爪,甚至创造出自然界不存在的手型,如双拇指手!这一设计的巧妙之处在于,它既保持简单易造(单件3D打印、低自由度控制),又能实现复杂的操作行为。
图片
更厉害的是,这些不同形态的手掌各有所长:标准人手能举起8公斤重物还能写字,双拇指设计能实现多点同时抓取,而细长的指猴手则能深入狭窄空间取物。这项研究表明,未来的机器手可能不必追求"像人手",而是根据任务量身定制专属形态。
▍一体成型+简单控制:把复杂变简单
机器手研究面临一个两难困境:要么设计极其复杂昂贵(像NASA的Robonaut手),要么功能过于简单(像常见的三指夹爪)。而OPH提供了一条中间路径。
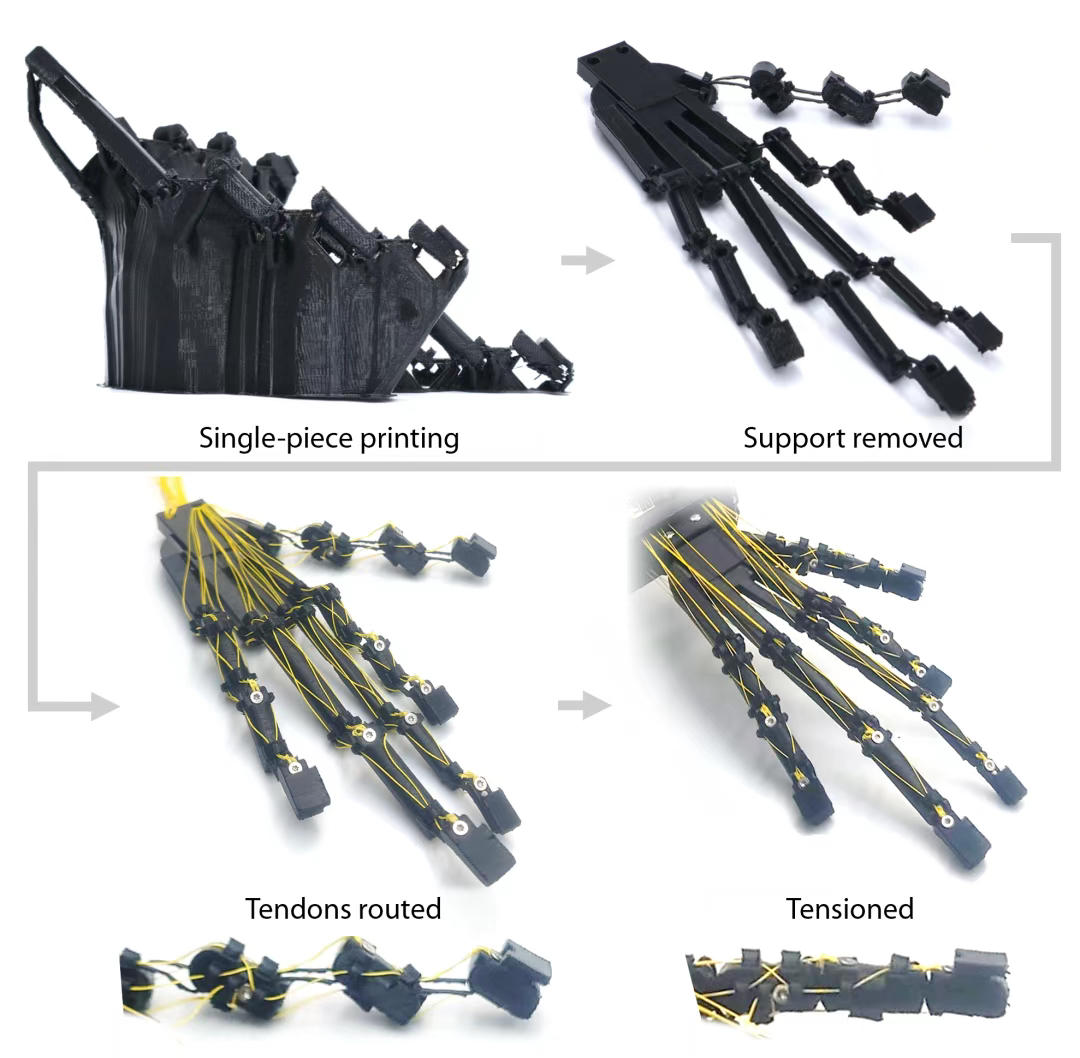
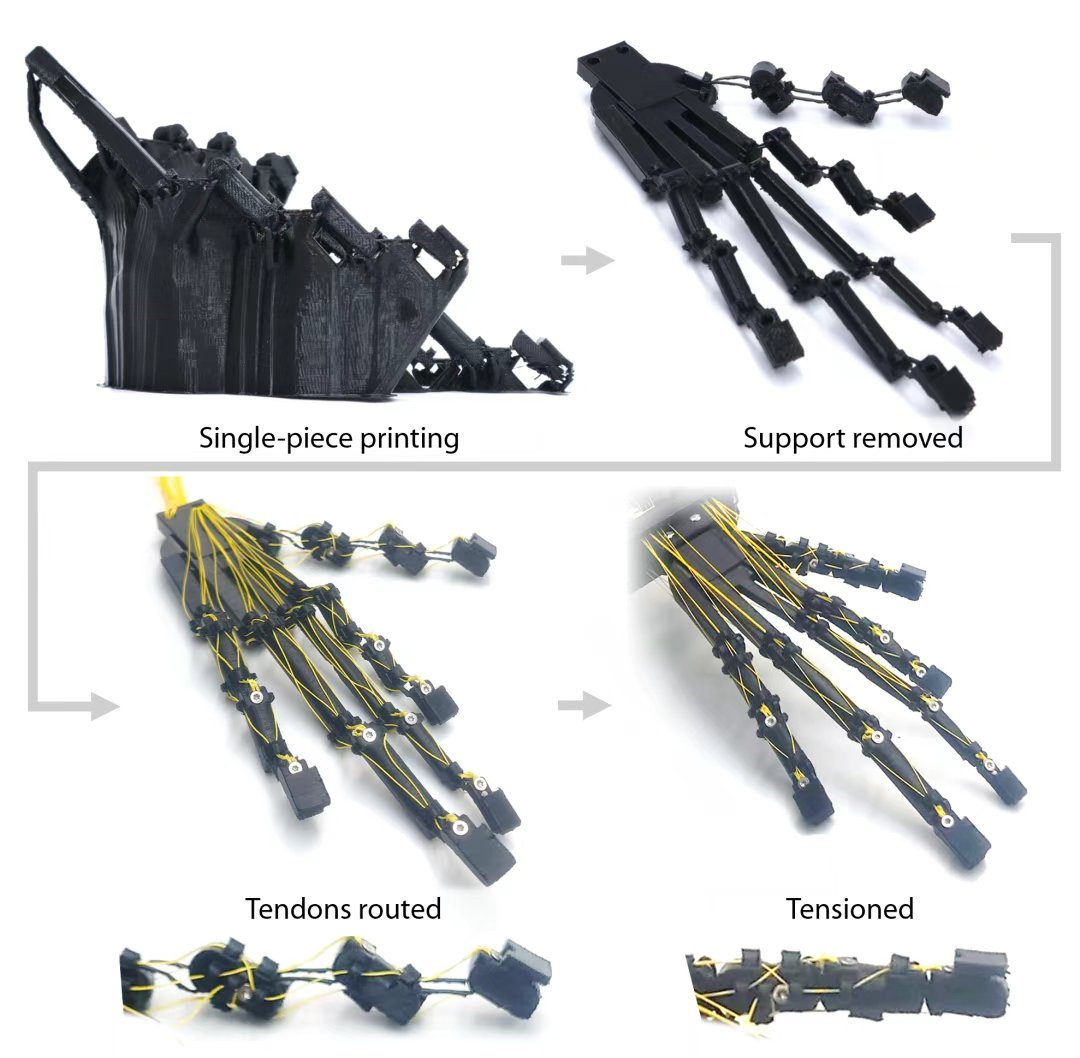
这个设计的第一个核心优势是制造简单。整个手骨架可以在一般的FDM 3D打印机上一体成型,使用的是普通的聚丙烯材料。打印完成后,只需穿入尼龙线作为"肌腱",连接几个弹簧和执行器,一个完整的机械手就组装完成了。从设计到打印完成仅需6-9小时。
图片
第二个优势是控制简单。尽管设计了类似于人手的结构(四个关节的五指),但执行系统被简化为最少1-2个自由度,通过协同控制和系列弹性执行机构实现多样化的动作。
图片
论文作者之一Kieran Gilday解释说:“我们不是要精确复制人手的每一个运动,而是希望捕捉其中最本质的部分——手的形态和被动特性如何与主动控制结合产生多样化行为。”
最值得一提的是,这种设计使得研究人员能够快速制作和测试不同形态的手,包括:
标准人手
双拇指"镜像"手(以中指为轴线,两侧各有一个拇指)
灵长类动物指猴手(手指细长)
图片
▍手指僵硬度可变660%:形态决定功能
令人惊讶的是,这种简单的设计却能产生丰富的动态行为。通过改变腱鞘配置,手指的被动刚度可以变化高达660%,而通过参数化设计调整,刚度还可以进一步变化400%。
为了测量这种变化,研究团队让机器人手臂从不同角度推动手指,并记录所需的力量。结果显示,从最软到最硬的状态,手指刚度可以从0.0086 N/mm变化到0.65 N/mm,这个范围接近人类手指的变化幅度(人手约为0.3-3 N/mm)。
这种可变刚度对机器手的功能至关重要。例如:
抓取易碎物品时需要柔软的接触
举重或使用工具时需要坚硬的握持
动态接球时需要适当的缓冲
研究团队设计了三种不同的执行系统:
1.单轮控制:一个驱动器同时控制所有手指,形成整体抓取姿态
2.可切换刚度控制:通过切换开关改变不同手指的刚度配置,在精细和力量抓取间切换
3.双轮控制:两个独立驱动器控制不同手指组合,实现更多样化的抓取姿态
测试显示,即使使用最简单的单轮控制,这款机器手也能承受高达80牛顿(约8公斤)的重物,远超许多复杂昂贵的商业机器手。
▍三种手型展现独特"超能力"
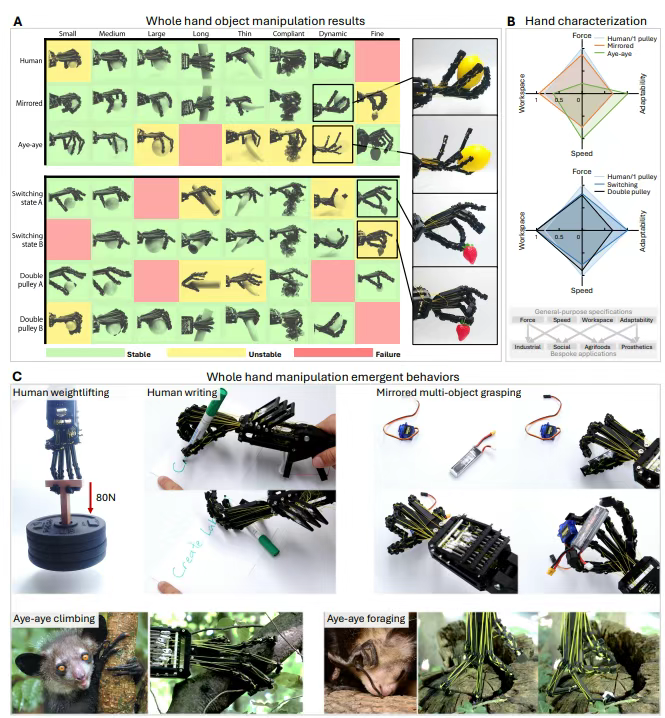
研究的最精彩部分是不同形态的手掌展现出各自独特的操作优势。

标准人手能完成多样化任务。它不仅能举起8公斤重物,还能拿笔写字,这在没有摩擦皮肤的情况下相当不易。
双拇指手则展现出非凡的多点操作能力。它能用两个拇指与其他手指形成多个夹持点,实现单手同时操作多个物体,这是常规人手难以做到的。正如研究人员所说:“双拇指设计在多个测试中表现最佳,特别是抓取与手掌大小相当的物体时。”
指猴手则在特殊环境中有独特优势。这种手设计模仿了一种善于在树洞中觅食的灵长类动物。其细长的手指特别适合在狭窄空间中操作,如模拟在树洞中取虫子。尽管在常规抓取测试中总体表现较弱,但在抓取极小物体(如草莓梗)时表现最佳。
这些结果证明了一个关键观点:手的形态与功能密切相关,不同形态适合不同任务。更重要的是,这种关系可以被系统地设计和优化。
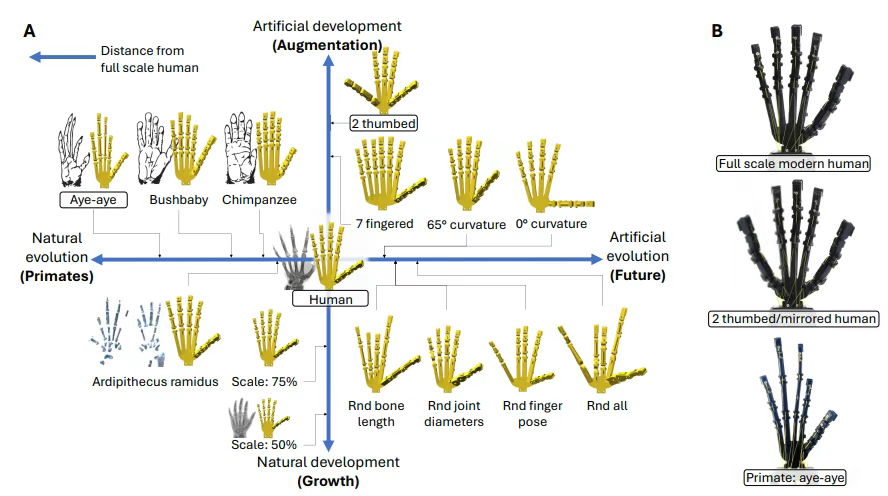
研究团队将这一设计空间描述为具有两个轴线:
1.进化轴:从灵长类动物到人类的长期演化变化
2.发展轴:从生长发育到人工增强的短期变化
图片
这一框架不仅可以模拟自然界中存在的各种手型,还可以探索未来可能的设计,如通过人工进化或专家设计的增强型手掌。
这项的目标不仅是创造更好的机器手,研究人员还希望理解手部形态与操作能力之间的内在联系。这可能帮助理解人类手部进化的原理,并设计出超越人类能力的新型机械手。"
这项研究的源代码和设计文件已经开源,感兴趣的朋友都可以基于此框架开发自己的手型。项目地址:https://github.com/kg398/100_fingers
虽然这一设计仍有局限(如缺乏皮肤和触觉反馈),但研究团队已展示了定制化机器手的巨大潜力。在未来的应用中,我们可能会看到针对特定任务优化的手型,如适合农业采摘的专用手、适合精密装配的工业手,甚至是根据残肢情况定制的个性化假肢。
或许有时候,最好的创新不是简单地模仿自然,而是理解并超越自然设计的原理,创造出自然界中不存在但更适合特定任务的解决方案。
论文链接:
https://www.science.org/doi/10.1126/scirobotics.ads6437