【YOLO 系列】基于YOLO的道路坑洞检测识别系统【python源码+Pyqt5界面+数据集+训练代码】
前言
在传统的道路维护和管理中,道路坑洞的检测通常依赖人工巡查,这种方式不仅效率低下,容易出现漏检和误检的情况,而且在复杂的路况和恶劣的天气条件下,检测人员的安全也难以保障。而基于 YOLO 的道路坑洞检测系统,通过安装在车辆或道路监控设备上的摄像头,实时捕捉道路的图像信息,再利用先进的算法进行分析处理,能够快速、准确地识别出道路坑洞的位置和大小,从而实现自动化检测,大大节省了时间和人力成本。
基于此项目,设计了一个使用Pyqt5库来搭建页面展示系统。本系统支持的功能包括训练模型的导入、初始化;置信度与IOU阈值的调节、图像上传、检测、可视化结果展示、结果导出与结束检测;视频的上传、检测、可视化结果展示、结果导出与结束检测;摄像头的上传、检测、可视化结果展示与结束检测;已检测目标信息列表、位置信息;以及推理用时。本博文提供了完整的Python代码和使用教程,适合新入门的朋友参考,完整代码资源文件请转至文末的下载链接。
优势
-
高准确性:基于 YOLO 模型的道路坑洞检测系统经过针对坑洞特征的训练,提高了对坑洞的识别准确度,减少了误报和漏报。
-
实时性:系统能够快速处理图像数据,实时识别坑洞,为道路维护人员提供即时的检测结果,避免因延迟导致的安全隐患。
-
鲁棒性:即使在光照条件不理想、道路表面污渍或磨损严重的情况下,系统也能保持高识别率。
-
多目标识别:系统不仅能识别单一坑洞,还能同时识别多个坑洞,提供全面的检测能力。
-
易于集成:系统设计考虑了与现有道路监控设备和维护系统的兼容性,易于集成和部署。
应用前景
-
道路维护:系统可以作为道路维护的核心技术,实时监测道路状况,自动完成坑洞检测,提升道路维护的效率和安全性。
-
智能交通:集成于智能交通系统中,系统可以在车辆行驶过程中自动检测道路坑洞,提前预警,减少交通事故的发生。
-
市政管理:系统提供的数据可以用于市政管理部门实时监控道路状况,优化维修计划,提高城市管理水平。
-
自动驾驶:通过分析道路坑洞的位置和大小,系统可以为自动驾驶车辆提供实时的路况信息,提升自动驾驶的安全性和可靠性。
-
数据分析:系统可以集成到城市大数据平台中,通过分析道路坑洞数据,为城市规划和道路建设提供数据支持。
通过本项目,我们期望能够为道路维护和管理提供有力的技术支持,提升道路坑洞检测的效率和准确性,优化道路维护的效率和安全性,推动智能交通和城市管理的智能化升级。未来,我们将继续优化系统性能,扩展更多功能,为智慧交通的发展贡献力量。
一、软件核心功能介绍及效果演示
软件主要功能
-
支持
图片、图片批量、视频及摄像头进行检测,同时摄像头可支持内置摄像头和外设摄像头; -
可对
检测结果进行单独分析,并且显示单个检测物体的坐标、置信度等; -
界面可实时显示
目标位置、检测结果、检测时间、置信度、检测结果回滚等信息; -
支持
图片、视频及摄像头的结果保存,将检测结果保持为excel文件;
视频演示
基于YOLO的道路坑洞检测识别系统
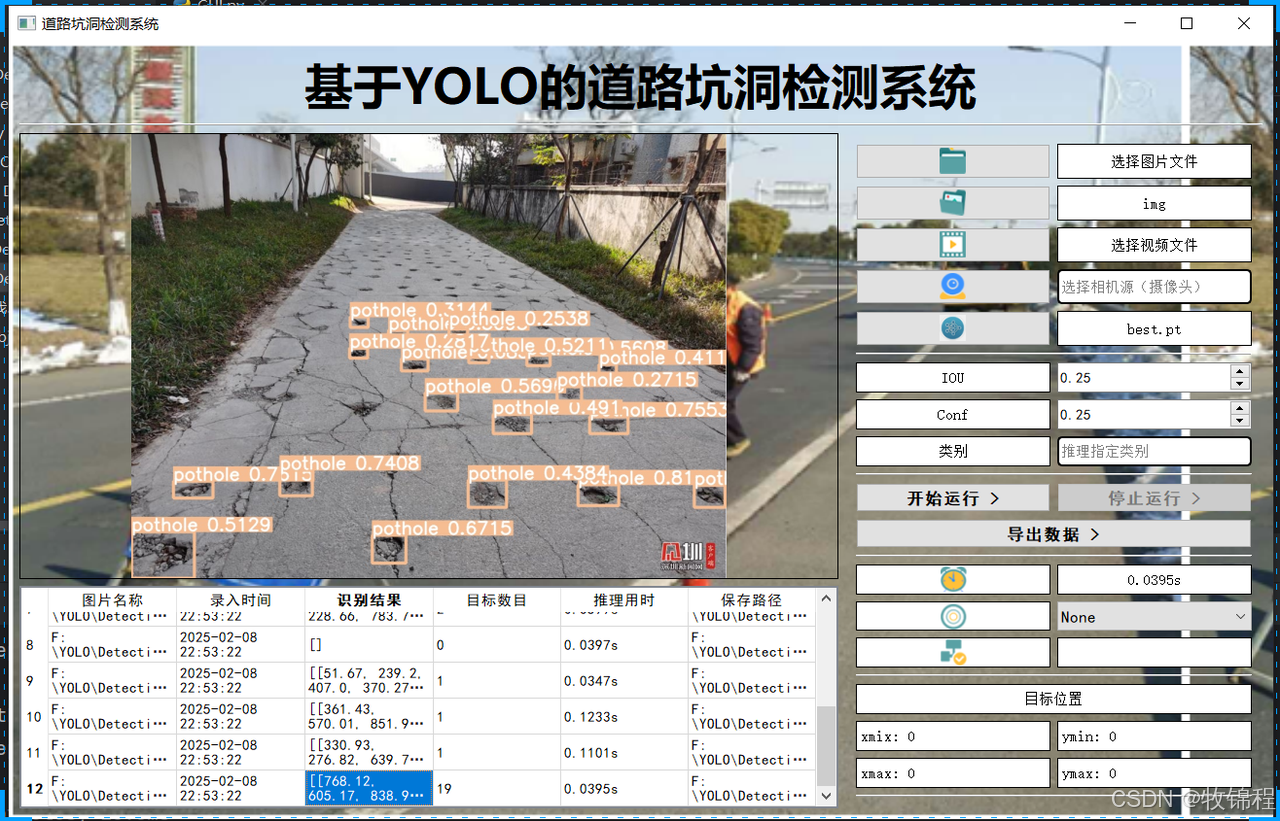
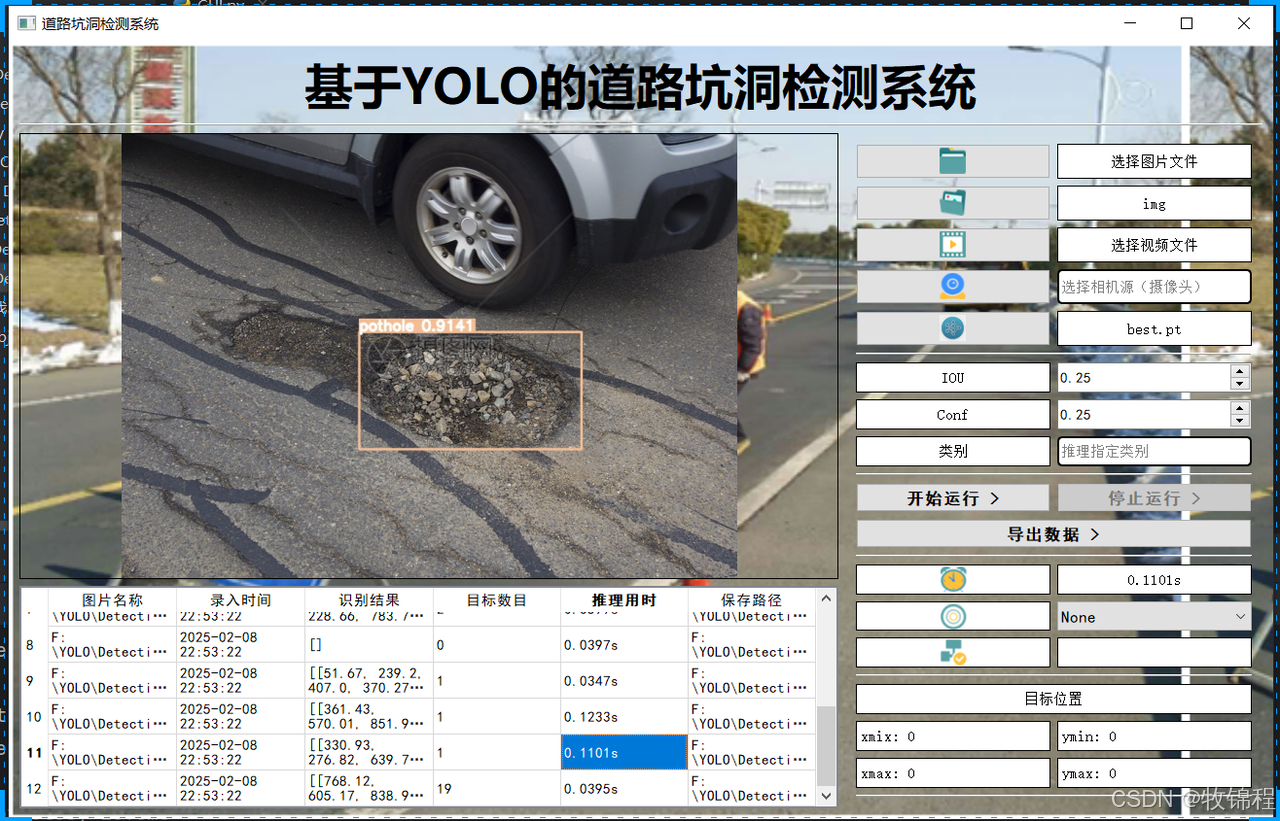
图片检测演示
-
点击
打开图片按钮,选择需要检测的图片,或者点击打开文件夹按钮,选择需要批量检测图片所在的文件夹,操作演示如下: -
点击表格中的指定行,界面会显示该行表格所写的信息内容。
视频检测演示
-
点击
视频按钮图标,打开选择需要检测的视频,在点击开始运行会自动显示检测结果。再次点击停止按钮,会停止检测视频。 -
点击表格中的指定行,界面会显示该行表格所写的信息内容。
摄像头检测演示
-
在
选择相机源中输入需要检测的摄像头(可以是电脑自带摄像头,也可以是外接摄像头,视频流等方式),然后点击摄像头图标来固定选择的推理流方式,最后在点击开始运行即可开始检测,当点击停止运行时则关闭摄像头检测。 -
点击表格中的指定行,界面会显示该行表格所写的信息内容。
检测结果保存
点击导出数据按钮后,会将当前选择的图片【含批量图片】、视频或者摄像头的检测结果进行保存为excel文档,结果会存储在output目录下。
二、环境搭建
创建专属环境
conda create -n yolo python==3.8
激活专属环境
conda activate yolo
安装torch-GPU库
pip install -i https://pypi.tuna.tsinghua.edu.cn/simple "torch-2.0.1+cu118-cp38-cp38-win_amd64.whl"
安装torchvision-GPU库
pip install -i https://pypi.tuna.tsinghua.edu.cn/simple "torchvision-0.15.2+cu118-cp38-cp38-win_amd64.whl"
安装ultralytics库
pip install ultralytics -i https://pypi.tuna.tsinghua.edu.cn/simple
测试环境
yolo predict model=yolov8n.pt source='https://ultralytics.com/images/bus.jpg'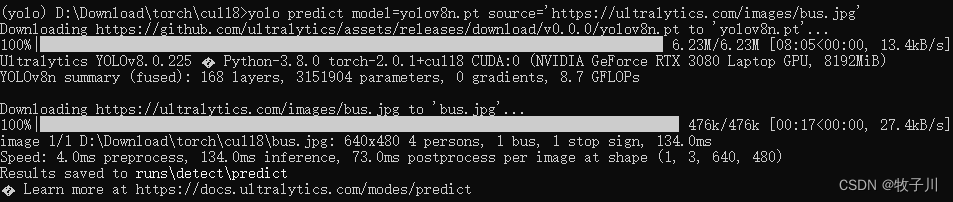

此时就表明环境安装成功!!!
安装图形化界面库 pyqt5
pip install pyqt5 -i https://pypi.tuna.tsinghua.edu.cn/simple
pip install pyqt5-tools -i https://pypi.tuna.tsinghua.edu.cn/simple三、算法原理
YOLOv8是一种前沿的深度学习技术,它基于先前YOLO版本在目标检测任务上的成功,进一步提升了性能和灵活性,在精度和速度方面都具有尖端性能。在之前YOLO 版本的基础上,YOLOv8 引入了新的功能和优化,使其成为广泛应用中各种物体检测任务的理想选择。主要的创新点包括一个新的骨干网络、一个新的 Ancher-Free 检测头和一个新的损失函数,可以在从 CPU 到 GPU 的各种硬件平台上运行。
YOLOv8目标检测算法具有如下的几点优势:
(1)更友好的安装/运行方式;
(2)速度更快、准确率更高;
(3)新的backbone,将YOLOv5中的C3更换为C2F;
(4)YOLO系列第一次使用anchor-free;
(5)新的损失函数。
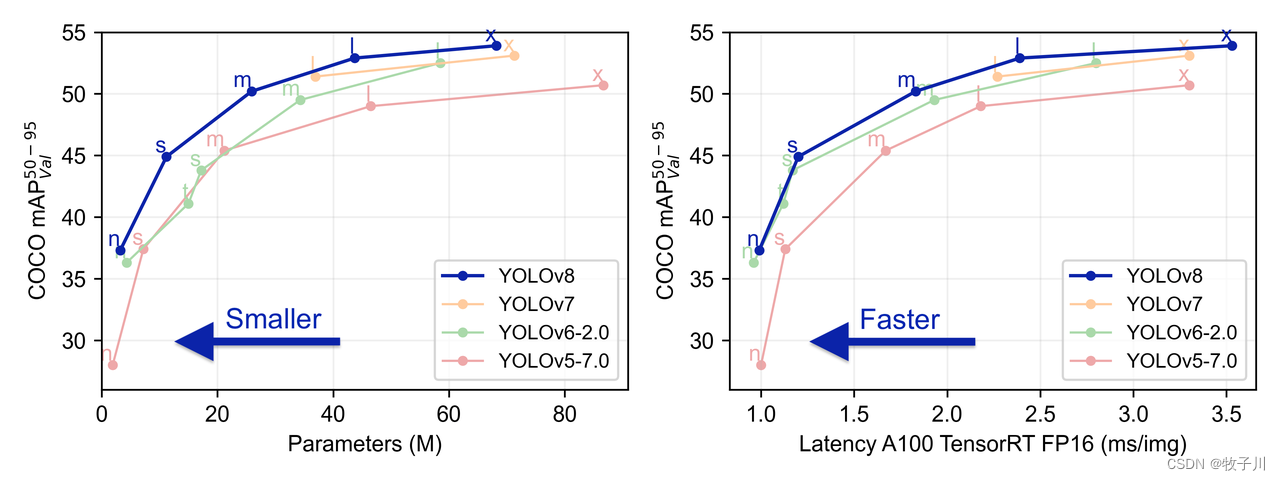
YOLO各版本性能对比
网络结构
YOLOv8模型的整体结构如下图所示:
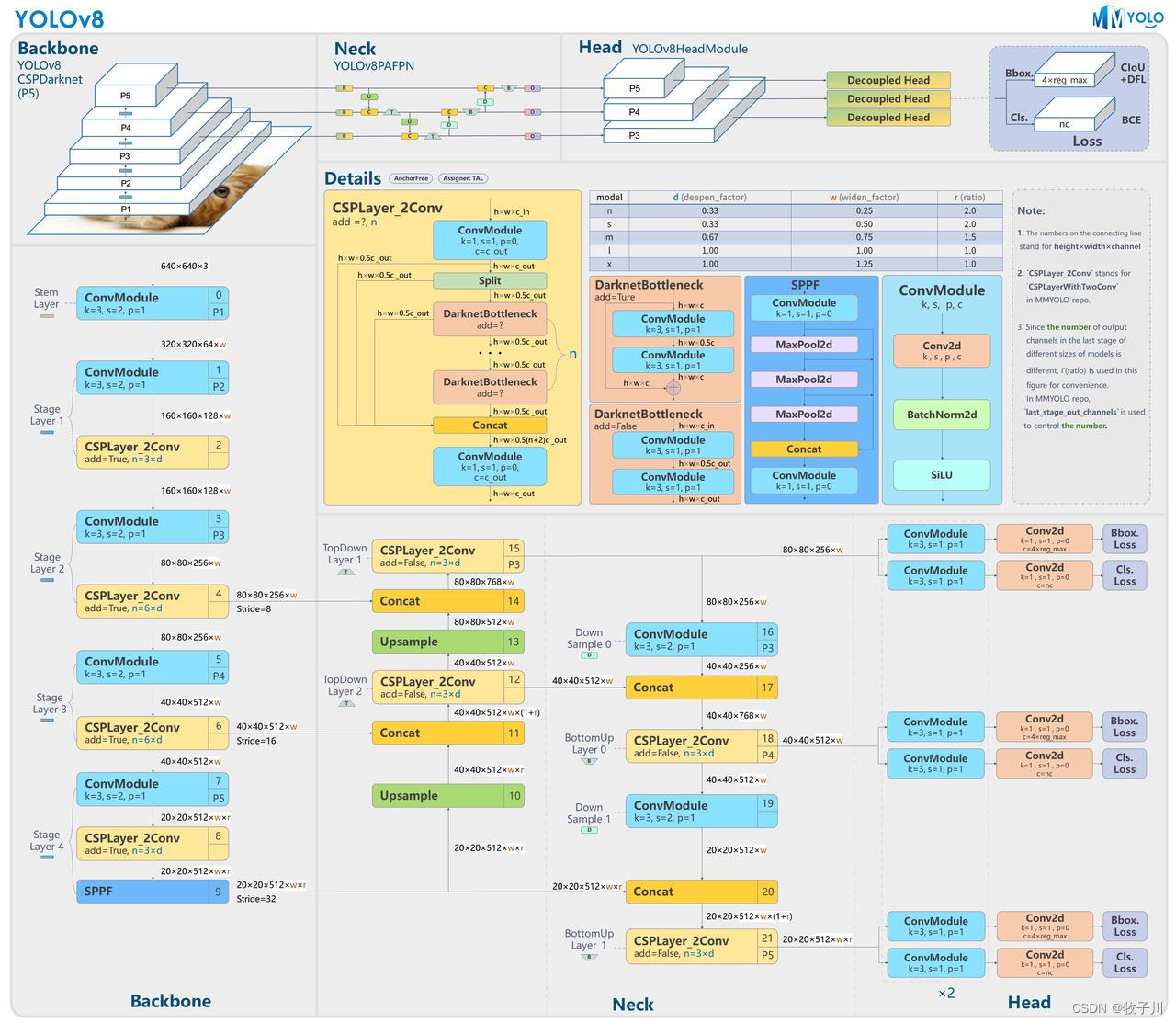
YOLOv8与YOLOv5模型最明显的差异是使用C2F模块替换了原来的C3模块;另外Head 部分变化最大,从原先的耦合头变成了解耦头,并且从 YOLOv5 的 Anchor-Based 变成了 Anchor-Free。
YOLOv8的网络架构包含了多个关键组件,这些组件共同工作以实现快速而准确的目标检测。首先是其创新的特征提取网络(Backbone),YOLOv8的Backbone采用了最新的网络设计理念,通过深层次的特征融合和精细的特征提取策略来增强对目标的识别能力。这一策略的成功关键在于其特征提取器能够充分捕获目标的细微特征,同时保持计算效率。
YOLOv8在训练策略上也进行了优化。与YOLOv7相比,YOLOv8采用了SPFF(Spatial Pyramid Fusion Fast)策略,该策略通过高效的多尺度特征融合提高了模型对不同大小目标的检测能力。此外,YOLOv8在训练过程中引入了一种名为Task Aligned Assigner的新技术,这种技术能够更精准地将预测框与真实目标对齐,从而提高检测的准确率。
在损失函数的设计上,YOLOv8进行了创新,采用了JFL(Joint Family Losses),这是一种集成了多个损失函数的复合损失函数,能够同时优化目标检测的多个方面。这些损失函数包括用于提升模型对目标位置和大小预测准确性的CIOU Loss,以及优化分类准确性的分类损失函数。JFL的设计允许YOLOv8更全面地考虑检测任务中的不同需求,通过协调各种损失来提升总体的性能。
YOLOv8的原理不仅在于其创新的技术点,更在于这些技术如何被综合应用于解决实际的目标检测问题。通过其精心设计的网络架构、高效的训练策略以及综合的损失函数设计,YOLOv8实现了在保持实时性的同时,提高了在复杂场景下的检测准确率。这些改进使得YOLOv8成为了一个强大的工具,适用于从自动驾驶到智能视频监控等多种应用场景。
四、模型的训练、评估与推理
数据集准备
本文使用的道路坑洞数据集,一共有1330张数据集。
图片数据集的存放格式如下:
-
运行splitDataset.py,用于划分数据集;
-
运行xml2txt.py,用于得到训练标注文件;
-
运行ViewCategory.py,用于查看一共有那些类别;
模型训练
数据准备完成后,通过调用train.py文件进行模型训练,epochs参数用于调整训练的轮数,代码如下:
from ultralytics import YOLOif __name__ == "__main__":# build from YAML and transfer weightsmodel = YOLO('./weights/yolo11n.pt')# Train the modelmodel.train(data='./VOCData/mydata.yaml', epochs=100, imgsz=640)
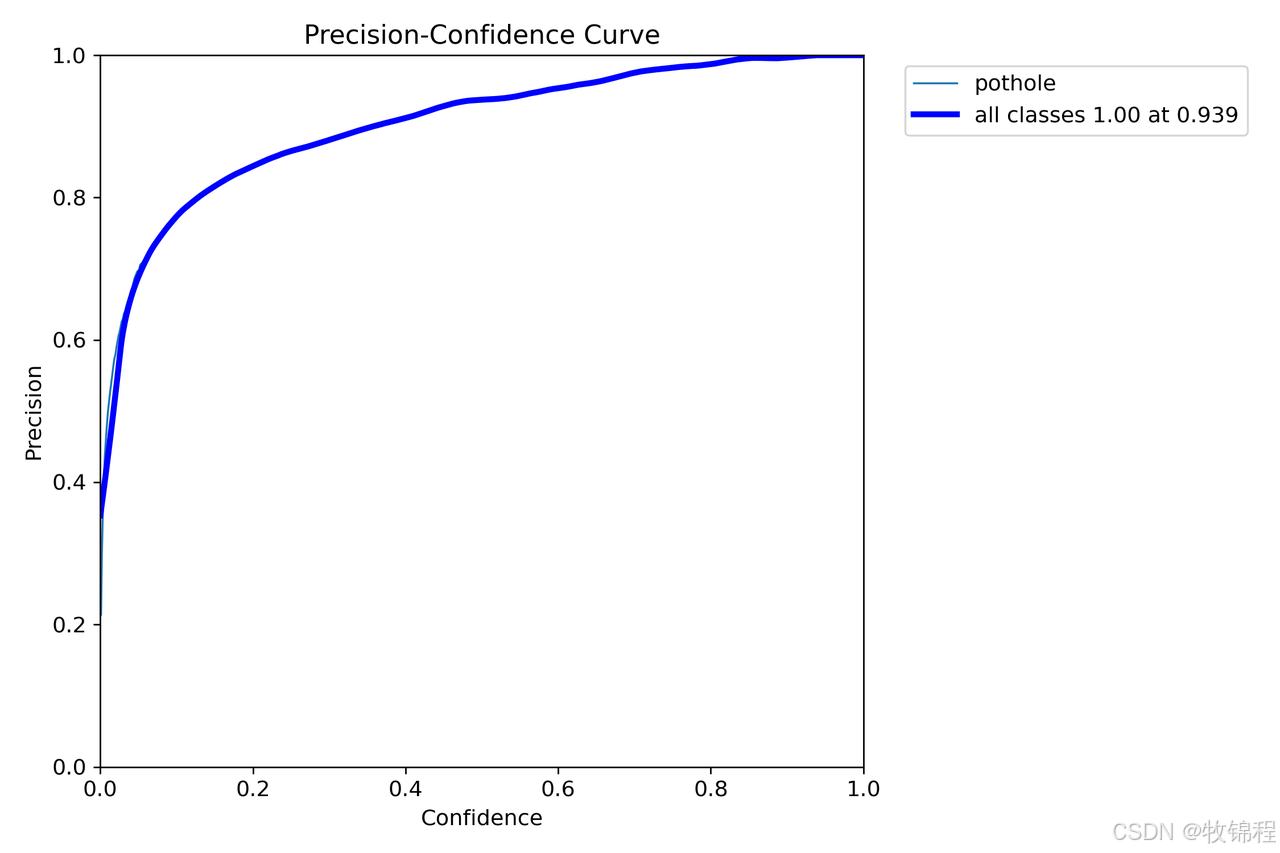
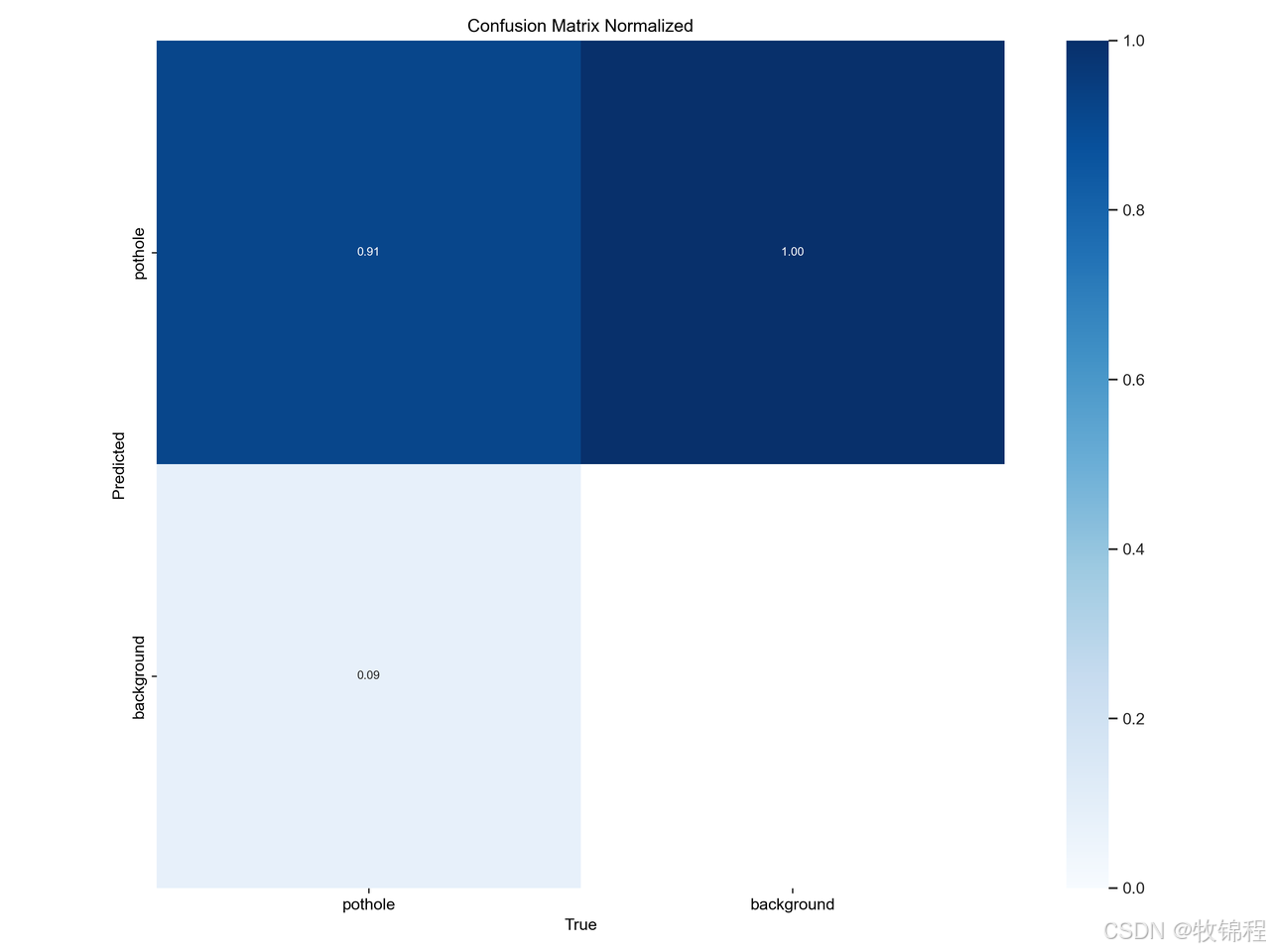
训练结果分析
YOLOv8在训练结束后,可以在runs/目录下找到训练过程及结果文件,如下所示:
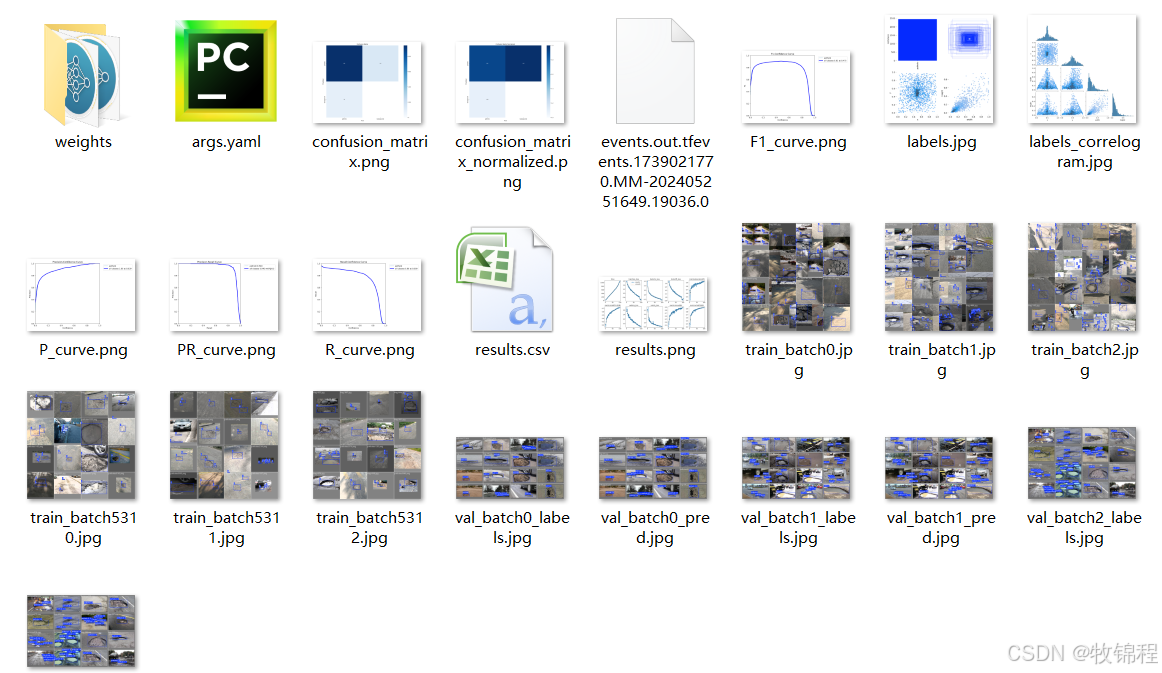
P_curve.png
confusion_matrix_normalized.png
训练 batch
验证 batch

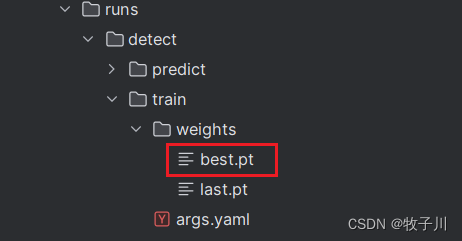
模型推理
模型训练完成后,可以得到一个最佳的训练结果模型best.pt文件,在runs/trian/weights目录下。我们通过使用该文件进行后续的推理检测。
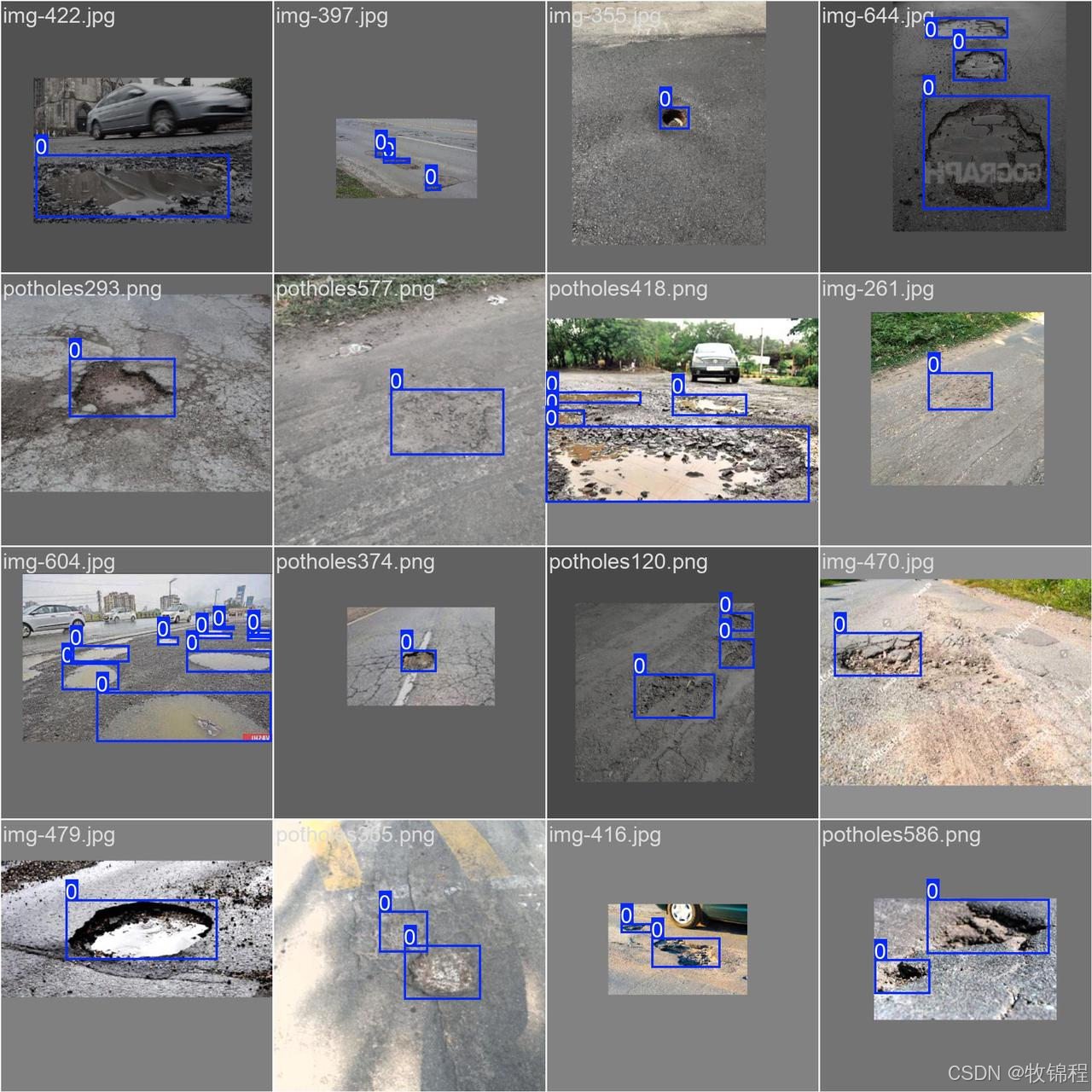
图片检测代码如下:
from ultralytics import YOLOif __name__ == "__main__":# Load a modelmodel = YOLO('./runs/detect/train/weights/best.pt')# Run batched inference on a list of imagesmodel("./img", imgsz=640, save=True)执行上述代码后,会将执行的结果直接标注在图片上,结果如下:
关于该系统涉及到的完整源码、UI界面代码、数据集、训练代码、测试图片视频等相关文件,均已打包上传,感兴趣的小伙伴可以通过下载链接自行获取。
五、获取方式
本文涉及到的完整全部程序文件:包括 python源码、数据集、训练好的结果文件、训练代码、UI源码、测试图片视频等(见下图),获取方式见文末:
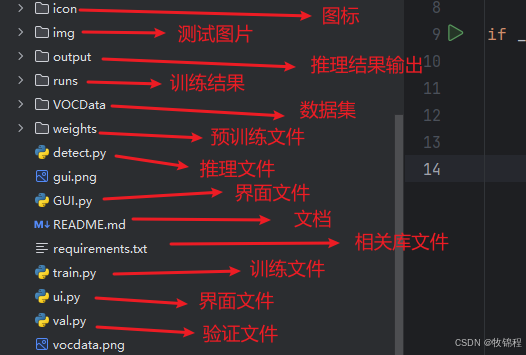
注意:该代码基于Python3.8开发,运行界面的主程序为GUI.py,其他测试脚本说明见上图。为确保程序顺利运行,请按照requirements.txt配置软件运行所需环境。
硬性的标准其实限制不了无限可能的我们,所以啊!少年们加油吧!