【数据融合实战手册·应用篇】“数字孪生+视频融合”让智慧城市拥有空间感知
一、视频融合技术如何破局城市治理?
#从"碎片监控"到"上帝视角"
传统视频监控系统画面分散,监管人员需要观看多个分镜头画面,难以将零散的分镜头视频与其实际地理位置对应,容易产生信息孤岛,同时单个目标容易出现在多个画面中,导致信息冗余。通过视频融合技术将多路实时视频与三维场景融合则可以有效解决以上问题,提高监管效率。
下面这个场景是我们利用Mapmost视频融合技术将无人机实时视频流融入三维路口场景的效果,能够实现车流情况实时监测,交通事故智能监管等。这正是视频融合技术改变城市治理的缩影。
无人机实时视频流与三维路口场景融合
二、视频融合技术深度解密
#什么是视频融合?
视频融合技术通过将实时视频流与数字孪生空间精准融合,赋予传统二维监控“空间感知”能力,即将平面像素坐标映射到三维地理空间,使监控画面不仅能显示目标对象,还能精准识别其空间位置、运动轨迹和周边环境关系。该技术利用相机标定建立真实世界与虚拟场景的坐标映射,通过动态三维建模引擎构建可交互的数字孪生环境,并通过纹理映射实现视频画面与三维场景融合。

视频平面像素坐标与地理空间坐标映射
三、Mapmost视频融合技术
Mapmost三维视频融合技术通过相机内参标定、相机畸变校正、相机位置和姿态估计、视频纹理投射等关键技术实现将监控画面精确映射到三维场景中。具体步骤分为:相机标定、三维场景构建、视频纹理投射。
#相机标定:让镜头拥有"空间自觉"
传统标定需要专业人员携带标定板现场作业,而通过Mapmost的相机标定工具,通过选取同一地理位置的图像点和三维点,基于标定算法,直接解算相机内外参数,实现相机内参标定、相机位置和姿态估计。
相机标定工具
#基于Mapmost构建高仿真三维场景
基于Mapmost Studio平台实现矢量、影像、地形、倾斜摄影、通用三维模型等多源异构数据的智能融合处理,输出标准地图服务。

多源异构数据处理
基于Mapmost新一代地图引擎,加载Mapmost Studio平台输出的地图服务,可实现高仿真三维场景的快速构建。引擎支持TB级数据流畅加载,通过可调环境光照、物理材质反射、实时阴影等渲染技术,结合后期处理,打造高还原度的三维数字孪生场景。

Mapmost构建高仿真三维场景
#视频-场景贴合:打破次元壁的魔法
将监控画面以视频纹理映射方式精确投射到三维场景对应空间位置,能够将碎片化的视频画面集成到三维空间,恢复视频画面空间位置信息,增强三维场景真实感表达效果。
Mapmost视频融合技术支持枪机、球机、无人机视频等与影像、三维模型、倾斜三维模型等融合可视。小编整理了一下基于Mapmost技术实现的视频融合案例:
-
视频与倾斜三维模型融合:通过将单路或者多路枪机监控视频与奥体场馆室内外三维场景融合,实时大型活动现场的人流分布监测、异常人员与事件监控,保障活动顺利与安全开展。

单路枪机视频与三维模型融合
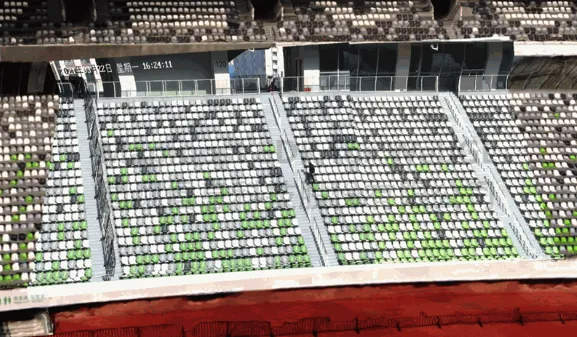
多路枪机视频与倾斜三维模型融合
-
视频与影像融合:通过将单路或多路无人机视频与影像融合,实现道路车流监测、道路异常事故管控等,让交通管理从“被动处置”迈向“主动治理”。

单路无人机视频与影像融合

多路无人机视频与影像融合
-
鱼眼相机视频与工厂车间三维场景融合:通过将鱼眼相机视频与工厂车间三维场景融合,解决传统监控视角受限、盲区多等问题,实现对工厂设备运行状态和人员作业行为的实时监测,为工厂数字化管理提供了全新的"上帝视角"。
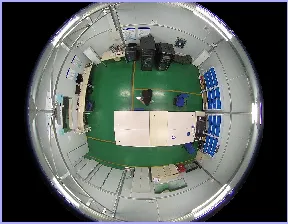
鱼眼相机视频 鱼眼相机与三维模型融合
Mapmost SDK 具备多种视频融合开发能力,并能提供定制化解决方案。如有相关技术需求,欢迎随时通过后台私信或文末联系方式与我们沟通。
点击此处跳转官网免费试用体验Mapmost系列产品!
关注 Mapmost,持续更新 GIS、三维美术、计算机技术干货
Mapmost 是一套以三维地图和时空计算为特色的数字孪生底座平台,包含了空间数据管理工具(Studio)、应用开发工具(SDK)、应用创作工具(Alpha)。平台能力已覆盖城市时空数据的集成、多源数据资源的发布管理,以及数字孪生应用开发工具链,满足企业开发者用户快速搭建数字孪生场景的切实需求,助力实现行业领先。
欢迎进入官网体验使用:Mapmost——让人与机器联合创作成为新常态