tinyrenderer笔记(上)
- tinyrenderer
- 个人代码仓库:tinyrenderer个人练习代码
- 参考笔记:从零构建光栅器,tinyrenderer笔记(上) - 知乎
第 1 课:Bresenham 画线算法
- Bresenham 画线算法:Bresenham 直线算法 - 知乎
第一次尝试
void line(int x0, int y0, int x1, int y1, TGAImage& image, TGAColor color)
{for (float t = 0.f; t <= 1.f; t += 0.01f){int x = x0 + (x1 - x0) * t;int y = y0 + (y1 - y0) * t;image.set(x, y, color);}
}
利用插值公式,每次使 x、y 的坐标增加一点,简单易懂,模拟的准确度依赖于 t 的大小。
第二次尝试
上面结果过于离散化,将 t 变为 0.01,增加绘制的点数:

效果变好了,但存在问题:
- 像素位置(
x与y)是整数,我们将浮点数截断转化为整数,如果直线比较短,会对同一个(x,y)遍历多次,导致了大量重复无意义的绘制。 - 如果直线过长,
t = 0.01可能还是不够,需要更小的值。
所以我们令 Δ x = 1 \Delta x=1 Δx=1,然后根据插值公式计算 y:
void line(int x0, int y0, int x1, int y1, TGAImage& image, TGAColor color)
{for (int x = x0; x <= x1; x++){float t = (x - x0) / (float)(x1 - x0);int y = y0 + (y1 - y0) * t;image.set(x, y, color);}
}
这样不论直线长度为多少,都能绘制出视觉上较为连续的直线。
现在一次性绘制 3 条直线:
line(13, 20, 80, 40, image, white);
line(20, 13, 40, 80, image, red);
line(80, 40, 13, 20, image, red);
结果并不好:
- 只存在第一条和第二条直线,第三条红色直线应该覆盖第一条白色直线才对
- 第二条红色直线过于离散化
先看第一个问题:我们的代码未考虑 x1 > x0 的情况,所以改正一下:
if (x0 > x1)
{std::swap(x0, x1);std::swap(y0, y1);
}
第三次尝试
在看第二个问题:我们现在保证了 Δ x = 1 \Delta x=1 Δx=1,但没有保证 Δ y ≤ 1 \Delta y \leq 1 Δy≤1,当直线斜率 k > 1 k>1 k>1 时, Δ y > 1 \Delta y > 1 Δy>1,从而导致 y 绘制的离散化。
这个问题也很好解决,既然直线斜率 k > 1 k>1 k>1,那么我们是不是可以令 Δ y = 1 \Delta y=1 Δy=1,然后利用插值公式计算 x 呢?完全没问题:
void line(int x0, int y0, int x1, int y1, TGAImage& image, TGAColor color)
{if (std::abs(x0 - x1) < std::abs(y0 - y1)) {if (y0 > y1){std::swap(x0, x1);std::swap(y0, y1);}for (int y = y0; y <= y1; y++){float t = (y - y0) / (float)(y1 - y0);int x = x0 + (x1 - x0) * t;image.set(x, y, color);}}else{if (x0 > x1){std::swap(x0, x1);std::swap(y0, y1);}for (int x = x0; x <= x1; x++){float t = (x - x0) / (float)(x1 - x0);int y = y0 + (y1 - y0) * t;image.set(x, y, color);}}
}
结果不错,但你会不会发现我们的代码有点太长了,两个 if 分支内的代码高度相似,直觉告诉我们可以将这两个地方合并一下。
动手能力强的小伙伴已经发现了,当 k > 1 k >1 k>1 时,我们将 x 与 y 交换一下值,在绘制的时候在交换回来就行了:
void line(int x0, int y0, int x1, int y1, TGAImage& image, TGAColor color)
{// 标记 k 是否大于 1bool steep = false;if (std::abs(x0 - x1) < std::abs(y0 - y1)) {// k > 1,交换 x 与 y 的值std::swap(x0, y0);std::swap(x1, y1);steep = true;}if (x0 > x1) {std::swap(x0, x1);std::swap(y0, y1);}for (int x = x0; x <= x1; x++) {float t = (x - x0) / (float)(x1 - x0);int y = y0 + (y1 - y0) * t;steep ? image.set(y, x, color) : image.set(x, y, color);}
}
第四次尝试
以上的代码在不考虑性能的情况下已经表现很好了,接下来的代码都是对性能的优化。
现在我们观察上面的代码,在每次循环中,我们进行了如下的操作:
float t = (x - x0) / (float)(x1 - x0);
int y = y0 + (y1 - y0) * t;
steep ? image.set(y, x, color) : image.set(x, y, color);
我们通过插值得到 y 值,而为了进行插值,我们进行了 3 次浮点运算(一次除法,一次乘法,一次加法)。我们希望减少浮点运算的次数,应该怎么做呢?
其实我们可以不进行插值运算来得到 y 值,我们令 Δ x = 1 \Delta x=1 Δx=1,记当前点为 ( x c u r , y c u r ) (x_{cur},y_{cur}) (xcur,ycur),前一个点为 ( x l a s t , y l a s t ) (x_{last},y_{last}) (xlast,ylast),可轻易得到以下结论:
y c u r = y l a s t + Δ y Δ y Δ x = k \begin{gathered} y_{cur} = y_{last} + \Delta y\\ \frac{\Delta y}{\Delta x}=k \end{gathered} ycur=ylast+ΔyΔxΔy=k
带入 Δ x = 1 \Delta x =1 Δx=1 可得:
y c u r = y l a s t + k y_{cur}=y_{last}+k ycur=ylast+k
在循环迭代之前,我们计算出斜率 k k k,然后在每次循环迭代中,我们同时记录 y 值就可以将浮点运算次数降到 1。
void line(int x0, int y0, int x1, int y1, TGAImage& image, TGAColor color)
{// 标记 k 是否大于 1bool steep = false;if (std::abs(x0 - x1) < std::abs(y0 - y1)){// k > 1,交换 x 与 y 的值std::swap(x0, y0);std::swap(x1, y1);steep = true;}if (x0 > x1){std::swap(x0, x1);std::swap(y0, y1);}int dx = x1 - x0;int dy = y1 - y0;// 斜率 kfloat derror = std::abs(dy / float(dx));float y = y0;for (int x = x0; x <= x1; x++) {steep ? image.set(y, x, color) : image.set(x, y, color);y += derror;}
}
在每次循环迭代中,我们只进行了一次浮点加法,显著的提高了效率。但这仍然存在一个问题:image.set 接受的参数类型为整型,将浮点数传入会触发截断操作,例如 1.9 会被认为 1。但我们更希望四舍五入而非直接截断小数位。所以我们用另外一个变量来存储小数部分:
void line(int x0, int y0, int x1, int y1, TGAImage& image, TGAColor color)
{// 标记 k 是否大于 1bool steep = false;if (std::abs(x0 - x1) < std::abs(y0 - y1)){// k > 1,交换 x 与 y 的值std::swap(x0, y0);std::swap(x1, y1);steep = true;}if (x0 > x1){std::swap(x0, x1);std::swap(y0, y1);}int dx = x1 - x0;int dy = y1 - y0;// 斜率 kfloat derror = std::abs(dy / float(dx));// y 的小数部分float error = 0;int y = y0;for (int x = x0; x <= x1; x++) {steep ? image.set(y, x, color) : image.set(x, y, color);error += derror;// 四舍五入if (error > 0.5) {// 判断斜率是否为负y += (y1 > y0 ? 1 : -1);error -= 1.0;}}
}
在上面的代码中,我们用 error 存储小数位,每当 error > 0.5 时我们会将 y 加 1 或减 1。但这又引入了另外一个问题,上面的浮点运算次数又变成了 3 次(一次加法,一次比较,一次减法)。但相比于最开始的 3 次浮点运算(一次除法,一次乘法,一次加法),我们消除了浮点除法与乘法,在浮点运算类型中,乘法与除法也是最耗时的(特别是除法)。
第五次尝试
观察上面的代码,浮点运算的对象都有 error,思考 error 这个浮点数在这里的作用是什么?它的作用只是决定了 y 是否变化 1,所以只要保证 y 变化的时机没有发生改变,那么 error 每次递增 k,还是递增多少,都对结果没有影响。
请看下面 3 个浮点运算式的推导( d y = y 1 − y 0 dy=y_1-y_0 dy=y1−y0, d x = x 1 − x 0 dx=x_1-x_0 dx=x1−x0):
e r r o r = e r r o r + d y d x e r r o r > 0.5 e r r o r = e r r o r − 1.0 \begin{gathered} error = error + \frac{d y}{d x}\\ error > 0.5\\ error = error - 1.0 \end{gathered} error=error+dxdyerror>0.5error=error−1.0
等式两边同乘 2 d x 2dx 2dx:
2 e r r o r ∗ d x = 2 e r r o r ∗ d x + 2 d y 2 e r r o r ∗ d x > d x 2 e r r o r ∗ d x = 2 e r r o r ∗ d x − 2 d x \begin{gathered} 2error*dx = 2error*dx + 2dy\\ 2error*dx > dx\\ 2error*dx= 2error*dx - 2dx \end{gathered} 2error∗dx=2error∗dx+2dy2error∗dx>dx2error∗dx=2error∗dx−2dx
所以满足 2 e r r o r ∗ d x > d x 2error*dx > dx 2error∗dx>dx 就相当于满足了 e r r o r > 0.5 error > 0.5 error>0.5,y 是否变化的时机也就没有发生变化。这里我们记 2 e r r o r ∗ d x 2error*dx 2error∗dx 为 error2,3 个浮点运算式也就变成了:
e r r o r 2 = e r r o r 2 + 2 d y e r r o r 2 > d x e r r o r 2 = e r r o r 2 − 2 d x \begin{gathered} error2 = error2 + 2dy\\ error2 > dx\\ error2 = error2 - 2dx \end{gathered} error2=error2+2dyerror2>dxerror2=error2−2dx
我们这么做的意义是什么?观察这 3 个浮点运算式,你会发现与 error2 计算相关的变量都变成了整数,这就意味着 error2 也是一个整数!所以我们直接将浮点运算次数降到了 0!
void line(int x0, int y0, int x1, int y1, TGAImage& image, TGAColor color)
{// 标记 k 是否大于 1bool steep = false;if (std::abs(x0 - x1) < std::abs(y0 - y1)){// k > 1,交换 x 与 y 的值std::swap(x0, y0);std::swap(x1, y1);steep = true;}if (x0 > x1){std::swap(x0, x1);std::swap(y0, y1);}int dx = x1 - x0;int dy = y1 - y0;int derror2 = std::abs(dy) * 2;int error2 = 0;int y = y0;for (int x = x0; x <= x1; x++) {steep ? image.set(y, x, color) : image.set(x, y, color);error2 += derror2;if (error2 > dx) {y += (y1 > y0 ? 1 : -1);error2 -= dx * 2;}}
}
第六次尝试
这个是在 issues 中被提出来的,主要思想是减少循环迭代时的分支:
steep ? image.set(y, x, color) : image.set(x, y, color);
y += (y1 > y0 ? 1 : -1);
将上面这两个分支代码提到循环迭代之前:
void line(int x0, int y0, int x1, int y1, TGAImage& image, TGAColor color)
{// 标记 k 是否大于 1bool steep = false;if (std::abs(x0 - x1) < std::abs(y0 - y1)){// k > 1,交换 x 与 y 的值std::swap(x0, y0);std::swap(x1, y1);steep = true;}if (x0 > x1){std::swap(x0, x1);std::swap(y0, y1);}int dx = x1 - x0;int dy = y1 - y0;int derror2 = std::abs(dy) * 2;int error2 = 0;int y = y0;const int yincr = (y1 > y0 ? 1 : -1);if (steep){for (int x = x0; x <= x1; x++){image.set(y, x, color);error2 += derror2;if (error2 > dx){y += yincr;error2 -= dx * 2;}}}else{for (int x = x0; x <= x1; x++){image.set(x, y, color);error2 += derror2;if (error2 > dx){y += yincr;error2 -= dx * 2;}}}
}
So it’s a pretty impressive speedup to eliminate the branch instruction inside a loop.
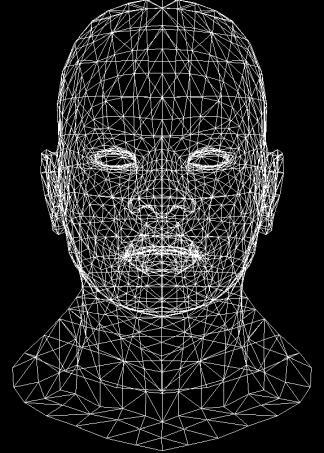
线框渲染
引入了一个 modle 类,用于从 obj 文件中读取点与面的信息。核心代码也很简单:
Model::Model(const char *filename) : verts_(), faces_() {std::ifstream in;in.open (filename, std::ifstream::in);if (in.fail()) return;std::string line;while (!in.eof()) {std::getline(in, line);std::istringstream iss(line.c_str());char trash;if (!line.compare(0, 2, "v ")) {iss >> trash;Vec3f v;for (int i=0;i<3;i++) iss >> v.raw[i];verts_.push_back(v);} else if (!line.compare(0, 2, "f ")) {std::vector<int> f;int itrash, idx;iss >> trash;while (iss >> idx >> trash >> itrash >> trash >> itrash) {idx--; // in wavefront obj all indices start at 1, not zerof.push_back(idx);}faces_.push_back(f);}}std::cerr << "# v# " << verts_.size() << " f# " << faces_.size() << std::endl;
}
model 存储的点位于模型空间中,坐标范围为 [ − 1 , 1 ] [-1,1] [−1,1]。我们需要将其转换到屏幕空间范围内: [ 0 , w i d t h ] [0, width] [0,width] 与 [ 0 , h e i g h t ] [0,height] [0,height]。现在我们只是在一个平面上绘制直线,所以不考虑深度即 z 坐标的影响。
auto* model = new Model("obj/african_head.obj");
for (int i = 0; i < model->nfaces(); i++)
{std::vector<int> face = model->face(i);for (int j = 0; j < 3; j++) {// face 存储的是 vertex 的序号Vec3f v0 = model->vert(face[j]);Vec3f v1 = model->vert(face[(j + 1) % 3]);int x0 = (v0.x + 1.) * width / 2.;int y0 = (v0.y + 1.) * height / 2.;int x1 = (v1.x + 1.) * width / 2.;int y1 = (v1.y + 1.) * height / 2.;line(x0, y0, x1, y1, image, white);}
}
本次代码提交记录:

第 2 课:三角形光栅化和背面剔除
老式方法:线扫描
绘制一个二维三角形,但不填充内部区域的代码很简单:
void triangle(Vec2i t0, Vec2i t1, Vec2i t2, TGAImage& image, TGAColor color)
{line(t0.x, t0.y, t1.x, t1.y, image, color);line(t1.x, t1.y, t2.x, t2.y, image, color);line(t2.x, t2.y, t0.x, t0.y, image, color);
}// ......
Vec2i t0[3] = {Vec2i(10, 70), Vec2i(50, 160), Vec2i(70, 80)};
Vec2i t1[3] = {Vec2i(180, 50), Vec2i(150, 1), Vec2i(70, 180)};
Vec2i t2[3] = {Vec2i(180, 150), Vec2i(120, 160), Vec2i(130, 180)};
triangle(t0[0], t0[1], t0[2], image, red);
triangle(t1[0], t1[1], t1[2], image, white);
triangle(t2[0], t2[1], t2[2], image, green);
三角形内部的填充可以用 vertex 也可以用 line,最直观的思路就是用水平或垂直的 line 去填充:
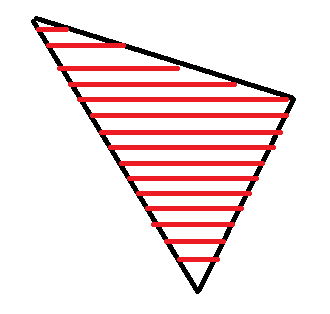
假设我们从下往上绘制,令 Δ y = 1 \Delta y=1 Δy=1 左侧的端点可直接通过直线的解析方程或者插值公式获得,而右侧的端点跨过了两条直线,我们无法通过一个解析方程表示两条直线,所以我们需要将整个三角形的填充分成两步,一次填充下半部分,一次填充上半部分:
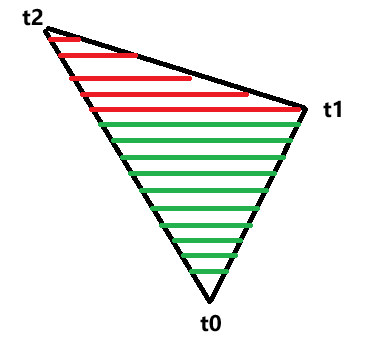
void triangle(Vec2i t0, Vec2i t1, Vec2i t2, TGAImage& image, TGAColor color)
{// 排序顶点, t0.y < t1.y < t2.yif (t0.y > t1.y) std::swap(t0, t1);if (t0.y > t2.y) std::swap(t0, t2);if (t1.y > t2.y) std::swap(t1, t2);int total_height = t2.y - t0.y;// 下半部分for (int y = t0.y; y <= t1.y; y++) {int segment_height = t1.y - t0.y + 1;float alpha = (float)(y - t0.y) / total_height;float beta = (float)(y - t0.y) / segment_height;Vec2i A = t0 + (t2 - t0) * alpha;Vec2i B = t0 + (t1 - t0) * beta;if (A.x > B.x) std::swap(A, B);for (int j = A.x; j <= B.x; j++) {image.set(j, y, color);}}// 上半部分for (int y = t1.y; y <= t2.y; y++) {int segment_height = t2.y - t1.y + 1;float alpha = (float)(y - t0.y) / total_height;float beta = (float)(y - t1.y) / segment_height;Vec2i A = t0 + (t2 - t0) * alpha;Vec2i B = t1 + (t2 - t1) * beta;if (A.x > B.x) std::swap(A, B);for (int j = A.x; j <= B.x; j++) {image.set(j, y, color);}}
}
可将两个循环合并到一起:
void triangle(Vec2i t0, Vec2i t1, Vec2i t2, TGAImage &image, TGAColor color) { if (t0.y==t1.y && t0.y==t2.y) return;// 不管退化的三角形if (t0.y>t1.y) std::swap(t0, t1); if (t0.y>t2.y) std::swap(t0, t2); if (t1.y>t2.y) std::swap(t1, t2); int total_height = t2.y-t0.y; for (int i=0; i<total_height; i++) { bool second_half = i>t1.y-t0.y || t1.y==t0.y; int segment_height = second_half ? t2.y-t1.y : t1.y-t0.y; float alpha = (float)i/total_height; float beta = (float)(i-(second_half ? t1.y-t0.y : 0))/segment_height;Vec2i A = t0 + (t2-t0)*alpha; Vec2i B = second_half ? t1 + (t2-t1)*beta : t0 + (t1-t0)*beta; if (A.x>B.x) std::swap(A, B); for (int j=A.x; j<=B.x; j++) { image.set(j, t0.y+i, color); } }
}
区域填充算法
核心思想是遍历三角形的包围盒,然后对包围盒内的每个 vertex 判断是否在三角形内部,如果在,那么就绘制这个点:
triangle(vec2 points[3]) { vec2 bbox[2] = find_bounding_box(points); for (each pixel in the bounding box) { if (inside(points, pixel)) { put_pixel(pixel); } }
}
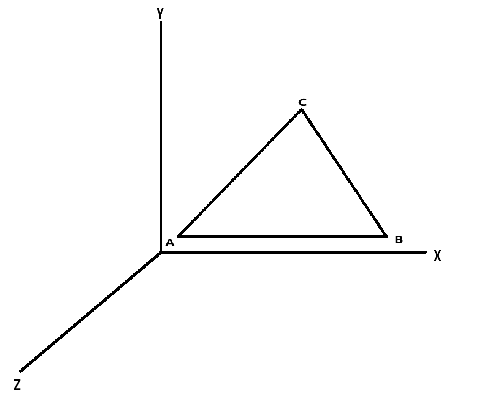
得到三角形的包围盒十分容易,这里唯一的难点在于如何判断一个点是否在三角形内部,设三角形三个顶点为 A A A、 B B B、 C C C,给定任意点 P P P ,下面列出了常用的四种方法:
面积法
将点 P P P 与三角形的三个顶点 A , B , C A,B,C A,B,C 连接,形成三个小三角形 P A B PAB PAB、 P B C PBC PBC、 P C A PCA PCA。如果 P P P 在三角形 A B C ABC ABC 内部,则这三个小三角形的面积之和等于原三角形 A B C ABC ABC 的面积。
常用的面积公式(行列式形式):
S ( A , B , C ) = 1 2 ∣ x A ( y B − y C ) + x B ( y C − y A ) + x C ( y A − y B ) ∣ \text{S}(A,B,C)=\frac{1}{2}\vert x_A(y_B - y_C)+x_B(y_C - y_A)+x_C(y_A - y_B)\vert S(A,B,C)=21∣xA(yB−yC)+xB(yC−yA)+xC(yA−yB)∣
需要计算 4 个三角形的面积(原三角形 + 3 个子三角形),计算量较大。
射线法
从点 P P P 向任意方向(如正右方)发射一条射线,统计与三角形边的 交点数。若交点数为 奇数,则 P P P 在三角形内部;否则在外部。对三角形来说,需要 3 次线段相交判断,计算量较大。但该方法适用于任意多边形,通用性强。
叉积法(同向法)
通过向量叉积判断点 P P P 是否在三角形的 同一侧。若三角形顶点按 顺时针或逆时针顺序排列,则 P P P 必须在三角形三条边的 同一侧(例如,始终在左侧或右侧)。
构建向量:
- A B → = B − A \overrightarrow{AB}=B-A AB=B−A
- A C → = C − A \overrightarrow{AC}=C-A AC=C−A
- A P → = P − A \overrightarrow{AP}=P-A AP=P−A
计算叉积:
- c 1 = A B → × A P → c1=\overrightarrow{AB} \times \overrightarrow{AP} c1=AB×AP
- c 2 = B C → × B P → c2=\overrightarrow{BC} \times \overrightarrow{BP} c2=BC×BP
- c 3 = C A → × C P → c3=\overrightarrow{CA} \times \overrightarrow{CP} c3=CA×CP
然后检查 c 1 c1 c1 、 c 2 c2 c2、 c 3 c3 c3 符号是否一致。此方法仅需 3 次叉积计算,运算量小(乘法和减法)。且无需浮点平方根运算,精度较高。
1. 二维向量叉乘
对于二维向量 a = ( a 1 , a 2 ) a = (a_1, a_2) a=(a1,a2) 和 b = ( b 1 , b 2 ) b = (b_1, b_2) b=(b1,b2),叉乘结果为标量:
a × b = a 1 b 2 − a 2 b 1 a \times b = a_1 b_2 - a_2 b_1 a×b=a1b2−a2b1
几何意义:
• 绝对值表示两向量张成的平行四边形面积。
• 符号表示方向:正值为 b b b 在 a a a 的逆时针方向,负值则为顺时针
2. 三维向量叉乘
对于三维向量 a = ( a 1 , a 2 , a 3 ) a = (a_1, a_2, a_3) a=(a1,a2,a3) 和 b = ( b 1 , b 2 , b 3 ) b = (b_1, b_2, b_3) b=(b1,b2,b3),叉乘结果为向量:
a × b = ( a 2 b 3 − a 3 b 2 , a 3 b 1 − a 1 b 3 , a 1 b 2 − a 2 b 1 ) a \times b = \left ( a_2 b_3 - a_3 b_2, \ a_3 b_1 - a_1 b_3, \ a_1 b_2 - a_2 b_1 \right) a×b=(a2b3−a3b2, a3b1−a1b3, a1b2−a2b1)
或用行列式表示:
a × b = ∣ i j k a 1 a 2 a 3 b 1 b 2 b 3 ∣ a \times b = \begin{vmatrix} \mathbf{i} & \mathbf{j} & \mathbf{k} \\ a_1 & a_2 & a_3 \\ b_1 & b_2 & b_3 \end{vmatrix} a×b= ia1b1ja2b2ka3b3
几何意义:
• 模长为两向量张成的平行四边形面积。
• 方向由右手定则确定,垂直于原向量所在平面。
重心坐标法
首先了解重心坐标的知识:计算机图形学补充1:重心坐标(barycentric coordinates)详解及其作用 - 知乎
点 P P P 的重心坐标(Barycentric Coordinates)是相对于三角形 △ A B C △ABC △ABC 的参数,表示为 ( u , v , w ) (u,v,w) (u,v,w),满足:
P = w A + v B + u C 且 u + v + w = 1 P=wA+vB+uC且u+v+w=1 P=wA+vB+uC且u+v+w=1
也可以理解为以 A A A 为原点,将 A C → \overrightarrow{AC} AC 与 A B → \overrightarrow{AB} AB 当作基向量来线性表示 A P → \overrightarrow{AP} AP:
P = w A + v B + u C P = ( 1 − u − v ) A + v B + u C P = u ( C − A ) + v ( B − A ) + A P − A = u ( C − A ) + v ( B − A ) A P → = u A C → + v A B → \begin{aligned} P&=wA+vB+uC\\ P&=(1-u-v)A+vB+uC\\ P&=u(C-A)+v(B-A)+A\\ P-A&=u(C-A)+v(B-A)\\ \overrightarrow{AP}&=u\overrightarrow{AC}+v\overrightarrow{AB} \end{aligned} PPPP−AAP=wA+vB+uC=(1−u−v)A+vB+uC=u(C−A)+v(B−A)+A=u(C−A)+v(B−A)=uAC+vAB
p p p 点在三角形内部的充分必要条件是: 1 > = u > = 0 , 1 > = v > = 0 , u + v < = 1 1 >= u >= 0, 1 >= v >= 0, u+v <= 1 1>=u>=0,1>=v>=0,u+v<=1。
求解方法一
求解 u , v , w u,v,w u,v,w 的方法有很多,你可以直接带入坐标用以下的公式得到(推导请参考上面的链接):
u = ( y a − y b ) x + ( x b − x a ) y + x a y b − x b y a ( y a − y b ) x c + ( x b − x a ) y c + x a y b − x b y a , v = ( y a − y c ) x + ( x c − x a ) y + x a y c − x c y a ( y a − y c ) x b + ( x c − x a ) y b + x a y c − x c y a , w = 1 − u − v . \begin{align*} u &= \frac{(y_a - y_b)x+(x_b - x_a)y + x_ay_b - x_by_a}{(y_a - y_b)x_c+(x_b - x_a)y_c + x_ay_b - x_by_a},\\ v &= \frac{(y_a - y_c)x+(x_c - x_a)y + x_ay_c - x_cy_a}{(y_a - y_c)x_b+(x_c - x_a)y_b + x_ay_c - x_cy_a},\\ w &= 1 - u - v. \end{align*} uvw=(ya−yb)xc+(xb−xa)yc+xayb−xbya(ya−yb)x+(xb−xa)y+xayb−xbya,=(ya−yc)xb+(xc−xa)yb+xayc−xcya(ya−yc)x+(xc−xa)y+xayc−xcya,=1−u−v.
求解方法二
也可以将 A P → = u A C → + v A B → \overrightarrow{AP}=u\overrightarrow{AC}+v\overrightarrow{AB} AP=uAC+vAB 等式两边同时点乘 A C → \overrightarrow{AC} AC 与 A B → \overrightarrow{AB} AB:
A P → ⋅ A C → = ( u A C → + v A B → ) ⋅ A C → A P → ⋅ A B → = ( u A C → + v A B → ) ⋅ A B → \begin{align*} \overrightarrow{AP}\cdot\overrightarrow{AC}&=(u\overrightarrow{AC}+v\overrightarrow{AB})\cdot\overrightarrow{AC}\\ \overrightarrow{AP}\cdot\overrightarrow{AB}&=(u\overrightarrow{AC}+v\overrightarrow{AB})\cdot\overrightarrow{AB} \end{align*} AP⋅ACAP⋅AB=(uAC+vAB)⋅AC=(uAC+vAB)⋅AB
解方程得到:
u = ( A B → ⋅ A B → ) ∗ ( A P → ⋅ A C → ) − ( A C → ⋅ A B → ) ∗ ( A P → ⋅ A B → ) ( A C → ⋅ A C → ) ∗ ( A B → ⋅ A B → ) − ( A C → ⋅ A B → ) ∗ ( A B → ⋅ A C → ) v = ( A C → ⋅ A C → ) ∗ ( A P → ⋅ A B → ) − ( A C → ⋅ A B → ) ∗ ( A P → ⋅ A C → ) ( A C → ⋅ A C → ) ∗ ( A B → ⋅ A B → ) − ( A C → ⋅ A B → ) ∗ ( A B → ⋅ A C → ) \begin{align*} u&=\frac{(\overrightarrow{AB}\cdot\overrightarrow{AB})*(\overrightarrow{AP}\cdot\overrightarrow{AC})-(\overrightarrow{AC}\cdot\overrightarrow{AB})*(\overrightarrow{AP}\cdot\overrightarrow{AB})}{(\overrightarrow{AC}\cdot\overrightarrow{AC})*(\overrightarrow{AB}\cdot\overrightarrow{AB})-(\overrightarrow{AC}\cdot\overrightarrow{AB})*(\overrightarrow{AB}\cdot\overrightarrow{AC})}\\ v&=\frac{(\overrightarrow{AC}\cdot\overrightarrow{AC})*(\overrightarrow{AP}\cdot\overrightarrow{AB})-(\overrightarrow{AC}\cdot\overrightarrow{AB})*(\overrightarrow{AP}\cdot\overrightarrow{AC})}{(\overrightarrow{AC}\cdot\overrightarrow{AC})*(\overrightarrow{AB}\cdot\overrightarrow{AB})-(\overrightarrow{AC}\cdot\overrightarrow{AB})*(\overrightarrow{AB}\cdot\overrightarrow{AC})} \end{align*} uv=(AC⋅AC)∗(AB⋅AB)−(AC⋅AB)∗(AB⋅AC)(AB⋅AB)∗(AP⋅AC)−(AC⋅AB)∗(AP⋅AB)=(AC⋅AC)∗(AB⋅AB)−(AC⋅AB)∗(AB⋅AC)(AC⋅AC)∗(AP⋅AB)−(AC⋅AB)∗(AP⋅AC)
此公式也可计算三维空间下的重心坐标
求解方法三
也可像原教程一样推导表达式的几何意义:
{ u A C → x + v A B → x + P A → x = 0 u A C → y + v A B → y + P A → y = 0 \begin{cases} u\overrightarrow{AC}_x + v\overrightarrow{AB}_x + \overrightarrow{PA}_x = 0 \\ u\overrightarrow{AC}_y + v\overrightarrow{AB}_y + \overrightarrow{PA}_y = 0 \end{cases} {uACx+vABx+PAx=0uACy+vABy+PAy=0
写成矩阵形式:
{ [ u v 1 ] [ A C → x A B → x P A → x ] = 0 [ u v 1 ] [ A C → y A B → y P A → y ] = 0 \begin{cases} \begin{bmatrix} u & v & 1 \end{bmatrix} \begin{bmatrix} \overrightarrow{AC}_x \\ \overrightarrow{AB}_x \\ \overrightarrow{PA}_x \end{bmatrix} = 0 \\ \begin{bmatrix} u & v & 1 \end{bmatrix} \begin{bmatrix} \overrightarrow{AC}_y \\ \overrightarrow{AB}_y \\ \overrightarrow{PA}_y \end{bmatrix} = 0 \end{cases} ⎩ ⎨ ⎧[uv1] ACxABxPAx =0[uv1] ACyAByPAy =0
可以认为向量 ( u , v , 1 ) (u,v,1) (u,v,1) 与 a = ( A C → x , A B → x , P A → x ) a = (\overrightarrow{AC}_x , \overrightarrow{AB}_x , \overrightarrow{PA}_x) a=(ACx,ABx,PAx) 、 b = ( A C → y , A B → y , P A → y ) b=(\overrightarrow{AC}_y , \overrightarrow{AB}_y , \overrightarrow{PA}_y) b=(ACy,ABy,PAy) 垂直。若 A , B , C A,B,C A,B,C 三点不共线,则 a a a 与 b b b 不可能共线,则可推导出:
( A C → x , A B → x , P A → x ) × ( A C → y , A B → y , P A → y ) = k ( u , v , 1 ) (\overrightarrow{AC}_x , \overrightarrow{AB}_x , \overrightarrow{PA}_x) \times (\overrightarrow{AC}_y , \overrightarrow{AB}_y , \overrightarrow{PA}_y) = k(u,v,1) (ACx,ABx,PAx)×(ACy,ABy,PAy)=k(u,v,1)
若你将两个向量叉积结果进行展开,然后带入表达式,你可以得到:
a × b = ( u D , v D , D ) = D ( u , v , 1 ) a×b=(uD,vD,D)=D(u,v,1) a×b=(uD,vD,D)=D(u,v,1)
其中 D = A C → x A B → y − A B → x A C → y D = \overrightarrow{AC}_x \overrightarrow{AB}_y - \overrightarrow{AB}_x \overrightarrow{AC}_y D=ACxABy−ABxACy, D D D 是向量 A B → \overrightarrow{AB} AB 与 A C → \overrightarrow{AC} AC 的二维叉积(即行列式),表示两向量构成的平行四边形的有向面积。由于 ABC 是三角形, A B → \overrightarrow{AB} AB 与 A C → \overrightarrow{AC} AC 不共线,因此 D ≠ 0 D \neq 0 D=0。所以当 a × b a \times b a×b 的第三个分量为 0 0 0 时,代表三角形 ABC 退化成了一条直线。
算法实现
上面的四种方法综合对比下来,叉积法的运算速度最快,重心坐标法其次。在图形渲染中,最常用的方法也是这两种。这里我们选用重心坐标法,因为重心坐标不仅可用来判断点 P P P 是否在三角形内部,还可以用它来插值求得一些顶点属性。
下面是求点 P 重心坐标的代码:
Vec3f barycentric(Vec2f A, Vec2f B, Vec2f C, Vec2f P)
{Vec3f a = { C.x - A.x, B.x - A.x, A.x - P.x };Vec3f b = { C.y - A.y, B.y - A.y, A.y - P.y };Vec3f u = a ^ b;// 三角形退化if (IsNearlyZero(u.z)){return Vec3f(-1, 1, 1);}return Vec3f(1.f - (u.x + u.y) / u.z, u.y / u.z, u.x / u.z);
}
区域填充算法:
void triangle(Vec2i t0, Vec2i t1, Vec2i t2, TGAImage& image, TGAColor color)
{// 包围盒范围Vec2i bboxmin(image.get_width() - 1, image.get_height() - 1);Vec2i bboxmax(0, 0);bboxmin.x = std::min({ bboxmin.x, t0.x, t1.x, t2.x });bboxmin.y = std::min({ bboxmin.y, t0.y, t1.y, t2.y });bboxmax.x = std::max({ bboxmax.x, t0.x, t1.x, t2.x });bboxmax.y = std::max({ bboxmax.y, t0.y, t1.y, t2.y });Vec2i P;for (int x = bboxmin.x; x <= bboxmax.x; x++){for (int y = bboxmin.y; y <= bboxmax.y; y++){P = Vec2i(x, y);Vec3f bc_screen = barycentric(t0, t1, t2, P);if (bc_screen.x < 0 || bc_screen.y < 0 || bc_screen.z < 0) continue;image.set(x, y, color);}}
}
Flat shading
第一课中,我们用线条绘制了模型的框架,现在让我们用随机颜色填充这个模型:
for (int i = 0; i < model->nfaces(); i++)
{std::vector<int> face = model->face(i);Vec2i screen_coords[3];for (int j = 0; j < 3; j++){Vec3f model_coords = model->vert(face[j]);// 模型空间坐标转化为屏幕空间坐标(此处模型空间就相当于世界空间)screen_coords[j] = Vec2i((model_coords.x + 1.0) * width / 2.0, (model_coords.y + 1.0) * height / 2.0);}triangle(screen_coords[0], screen_coords[1], screen_coords[2], image, TGAColor(rand() % 255, rand() % 255, rand() % 255, 255));
}

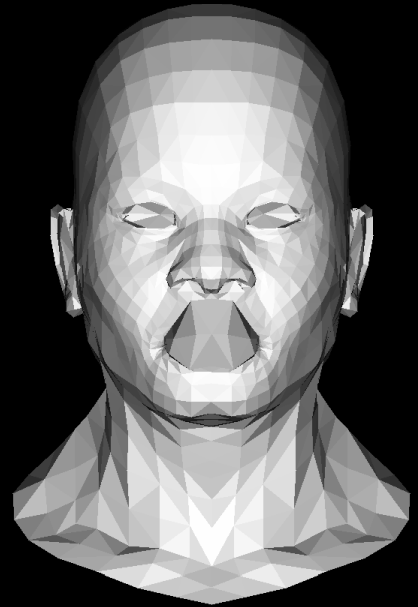
现在我们将随机颜色换成光照,采用 Flat shading,三角面内的所有点使用相同的法线,法线用三角形顶点向量叉乘获得:
n ⃗ = A B → × A C → \vec{n}=\overrightarrow{AB} \times \overrightarrow{AC} n=AB×AC
OBJ 文件中的面默认顶点顺序通常为逆时针排列,用于表示正面(法线朝屏幕外,符合右手定则),所以面法向量应该用 A B → × A C → \overrightarrow{AB} \times \overrightarrow{AC} AB×AC。
此处只考虑漫反射光照: i n t e n s i t y = n ⋅ l i g h t _ d i r intensity=n\cdot light\_dir intensity=n⋅light_dir ,但需要注意此处的 l i g h t _ d i r light\_dir light_dir 需要反向,是着色点朝向光源位置,而非光源位置朝向着色点。所以实际公式为: i n t e n s i t y = n ⋅ − l i g h t _ d i r intensity=n\cdot -light\_dir intensity=n⋅−light_dir。
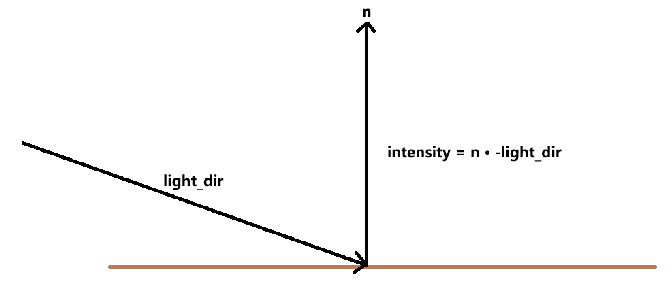
我们使用定向光源 Vec3f light_dir(0, 0, -1),代码如下:
Vec3f light_dir(0, 0, -1); // define light_dir
for (int i = 0; i < model->nfaces(); i++)
{std::vector<int> face = model->face(i);Vec2i screen_coords[3];Vec3f model_coords;for (int j = 0; j < 3; j++){Vec3f model_coords = model->vert(face[j]);// 模型空间坐标转化为屏幕空间坐标(此处模型空间就相当于世界空间)screen_coords[j] = Vec2i((model_coords.x + 1.0) * width / 2.0, (model_coords.y + 1.0) * height / 2.0);}Vec3f n = (model->vert(face[1]) - model->vert(face[0])) ^ (model->vert(face[2]) - model->vert(face[0]));n.normalize();float intensity = -(n * light_dir);if (intensity > 0) {triangle(screen_coords[0], screen_coords[1], screen_coords[2], image, TGAColor(intensity * 255, intensity * 255, intensity * 255, 255));}
}
点积也可以为负数,代表该三角面背向光源,我们可以将其剔除而不绘制,这称为背向面剔除(Back-face culling)。
本次代码提交记录:

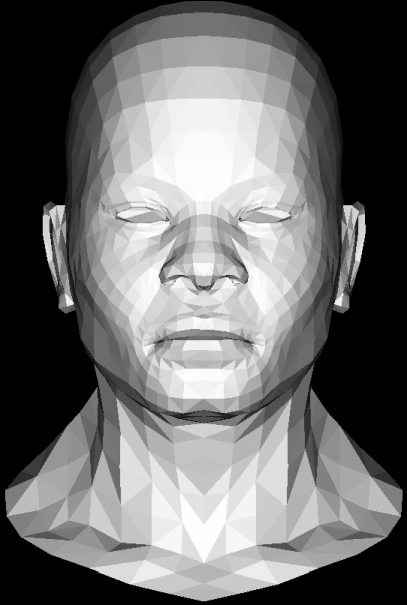
第 3 课:Z-Buffer
第 2 次课最后绘制出的模型,嘴唇被嘴巴内腔所覆盖。嘴巴内腔应该隐藏在嘴唇之后,不应该被我们直接观察到,除非模型张开了嘴巴。不能被直接观察到的表面被称为隐藏面,我们需要一种算法来进行隐藏面消除。
教程采用的是 Z-Buffer 算法来进行隐藏面消除,思路很简单:为每个像素记录最近(离观察者)的深度值,确保渲染时只显示距离观察者最近的物体表面。
triangle(vec3 points[3]) { vec2 bbox[2] = find_bounding_box(points); for (each pixel in the bounding box) { if (inside(points, pixel)) {// 使用重心坐标对三角形三个顶点的z值进行插值,得到points的z值points.depth = lerp(points[3])if(points.depth < zbuffer.depth){zbuffer.depth = points.depthput_pixel(pixel);} } }
}
唯一需要注意的是如何得到三角形内部点的深度值,而这就是我们前面采用重心坐标法判断点是否在三角形内部的原因,此时我们已经有了点 P 的重心坐标 ( w , v , u ) (w,v,u) (w,v,u),观察重心坐标的表达式:
( x , y ) = w A + v B + u C (x,y)=w A + v B + u C (x,y)=wA+vB+uC
若你将顶点位置替换为其它属性,那么你就会发现,重心坐标可以合理的得到三个顶点某个属性的平均。所以点 P 的深度值为:
P.z = bc_screen.x * t0.z + bc_screen.y * t1.z + bc_screen.z * t2.z;
同时还需要注意一个地方由于 z 轴是朝向屏幕外的,所以物体离屏幕越远(深度越深),z 值越小;离屏幕越近(深度越浅),z 值越大。
void triangle(Vec3f t0, Vec3f t1, Vec3f t2, float* zbuffer, TGAImage& image, TGAColor color)
{// 包围盒范围Vec2f bboxmin(image.get_width() - 1, image.get_height() - 1);Vec2f bboxmax(0, 0);bboxmin.x = std::min({ bboxmin.x, t0.x, t1.x, t2.x });bboxmin.y = std::min({ bboxmin.y, t0.y, t1.y, t2.y });bboxmax.x = std::max({ bboxmax.x, t0.x, t1.x, t2.x });bboxmax.y = std::max({ bboxmax.y, t0.y, t1.y, t2.y });Vec3f P;for (int x = bboxmin.x; x <= bboxmax.x; x++){for (int y = bboxmin.y; y <= bboxmax.y; y++){P = Vec3f(x, y, 0);Vec3f bc_screen = barycentric(t0, t1, t2, P);if (bc_screen.x < 0 || bc_screen.y < 0 || bc_screen.z < 0) continue;// 重心坐标插值P.z = bc_screen.x * t0.z + bc_screen.y * t1.z + bc_screen.z * t2.z;if (P.z > zbuffer[int(x + y * width)]){zbuffer[int(x + y * width)] = P.z;image.set(x, y, color);}}}
}
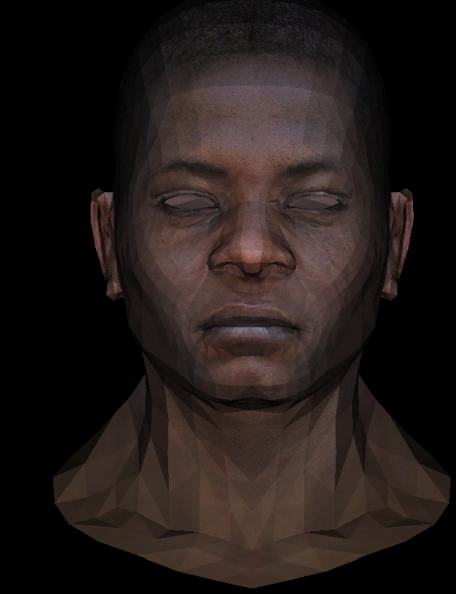
纹理
现在的渲染结果假定三角面的基础颜色是白色,是时候引入纹理贴图了。obj 文件存储了每个顶点的纹理坐标(以 vt 开头),修改我们的 model 类,以存储纹理坐标:
class Model {
private:std::vector<Vec3f> verts_; // 所有顶点std::vector<Vec2f> vertsTexture_; // 所有纹理std::vector<std::vector<int> > facesV_; // 面-顶点std::vector<std::vector<int> > facesVT_; // 面-纹理
public:Model(const char *filename);~Model();int nverts();int nfaces();Vec3f vert(int i);// 获得顶点坐标Vec2f textureCoor(int i);// 获得纹理坐标std::vector<int> face_v(int idx);std::vector<int> face_vt(int idx);
};
增加了存储纹理坐标所需的数组,cpp 文件重要看构造函数,增加了读取纹理坐标的判断语句:
while (!in.eof()) {std::getline(in, line);std::istringstream iss(line.c_str());char trash;if (!line.compare(0, 2, "v ")) {iss >> trash;Vec3f v;for (int i=0;i<3;i++) iss >> v.raw[i];verts_.push_back(v);} else if (!line.compare(0, 2, "f ")) {std::vector<int> f_v;std::vector<int> f_vt;int itrash, vIdx, vtIdx;iss >> trash;while (iss >> vIdx >> trash >> vtIdx >> trash >> itrash) {vIdx--; // in wavefront obj all indices start at 1, not zerovtIdx--;f_v.push_back(vIdx);f_vt.push_back(vtIdx);}facesV_.push_back(f_v);facesVT_.push_back(f_vt);}else if (!line.compare(0, 4, "vt ")){iss >> trash;iss >> trash;Vec3f v;for (int i = 0;i < 3;i++) iss >> v.raw[i];vertsTexture_.emplace_back(v[0], v[1]);}}
TGAImage 新增了一个函数,用于采样贴图:
// 输入纹理坐标[0,1]
TGAColor TGAImage::texture(float x, float y)
{if (!data || x < 0 || y < 0) {return TGAColor();}double int_part;// 获得小数部分,确保 <= 1x = std::modf(x, &int_part);y = std::modf(y, &int_part);return get(x * width, y * height);
}
main.cpp 增加了一个顶点信息类:
struct VertexInfo
{Vec3f location;Vec2f textureCoor;
};
在 triangle 函数里面,会根据三个顶点插值得到内部点的纹理坐标,然后去贴图中采样得到颜色值:
void triangle(VertexInfo t0, VertexInfo t1, VertexInfo t2, float* zbuffer, TGAImage& res, TGAImage& tex, float light)
{// 包围盒范围Vec2f bboxmin(res.get_width() - 1, res.get_height() - 1);Vec2f bboxmax(0, 0);bboxmin.x = std::min({ bboxmin.x, t0.location.x, t1.location.x, t2.location.x });bboxmin.y = std::min({ bboxmin.y, t0.location.y, t1.location.y, t2.location.y });bboxmax.x = std::max({ bboxmax.x, t0.location.x, t1.location.x, t2.location.x });bboxmax.y = std::max({ bboxmax.y, t0.location.y, t1.location.y, t2.location.y });Vec3f P;for (int x = bboxmin.x; x <= bboxmax.x; x++){for (int y = bboxmin.y; y <= bboxmax.y; y++){P = Vec3f(x, y, 0);Vec3f bc_screen = barycentric(t0.location, t1.location, t2.location, P);if (bc_screen.x < 0 || bc_screen.y < 0 || bc_screen.z < 0) continue;// 重心坐标插值P.z = bc_screen.x * t0.location.z + bc_screen.y * t1.location.z + bc_screen.z * t2.location.z;if (P.z > zbuffer[int(x + y * width)]){zbuffer[int(x + y * width)] = P.z;Vec2f texCoor = t0.textureCoor * bc_screen.x + t1.textureCoor * bc_screen.y + t2.textureCoor * bc_screen.z;TGAColor diffuse = tex.texture(texCoor.x, texCoor.y);res.set(x, y, TGAColor(diffuse.r * light, diffuse.g * light, diffuse.b * light, 255));}}}
}
main 函数:
for (int i = 0; i < model->nfaces(); i++)
{std::vector<int> face_v = model->face_v(i);std::vector<int> face_vt = model->face_vt(i);VertexInfo vertex[3];for (int j = 0; j < 3; j++){vertex[j].textureCoor = model->textureCoor(face_vt[j]);Vec3f model_coords = model->vert(face_v[j]);// 模型空间坐标转化为屏幕空间坐标(此处模型空间就相当于世界空间)vertex[j].location = Vec3f((model_coords.x + 1.0) * width / 2.0, (model_coords.y + 1.0) * height / 2.0, model_coords.z);}Vec3f n = (model->vert(face_v[1]) - model->vert(face_v[0])) ^ (model->vert(face_v[2]) - model->vert(face_v[0]));n.normalize();float intensity = -(n * light_dir);if (intensity > 0) {triangle(vertex[0], vertex[1], vertex[2], zbuffer, result, texture, intensity);}
}
obj 文件中还存储了每个顶点的法线,相似的过程,我们可以把法线也引入到 model 中。
本次代码提交记录:

参考
- tinyrenderer
- 从零构建光栅器,tinyrenderer笔记(上) - 知乎
- 计算机图形学补充1:重心坐标(barycentric coordinates)详解及其作用 - 知乎
- Bresenham 直线算法 - 知乎