【VLNs篇】01:视觉语言导航(VLN)中的LLM角色
想象一下这个场景:你慵懒地躺在沙发上,突然想起,“嘿,我的水瓶落在厨房咖啡机旁边那个高柜台上了,能帮我拿过来吗?
” 对于人类来说,这是一个简单的请求。但对于一个机器人助手,理解并准确执行这个指令,需要一套复杂的认知能力:精准的语言理解(哪个水瓶?哪个柜台?“旁边”意味着什么?)、敏锐的视觉感知(识别厨房环境、咖啡机、柜台、水瓶),以及智能的路径规划与执行(如何从这里安全高效地到达目标位置并取回物品)。这项融合了语言、视觉和行动的挑战性任务,在人工智能领域被称为视觉语言导航(Vision-and-Language Navigation, VLN)。
近年来,一股强大的技术浪潮正席卷而来,有望彻底改变 VLN 的面貌。这股浪潮的核心,就是驱动着 ChatGPT、Claude 等先进 AI 的大语言模型(LLM)。曾经主要用于文本生成和对话的 LLM,如今正被研究者们巧妙地塑造为导航机器人的“大脑”或“中央决策单元”,赋予它们前所未有的规划、推理和适应能力。
事实证明,LLM 在处理 VLN 固有的模糊性、复杂性和常识性要求方面,展现出了惊人的潜力。它们不再仅仅是“鹦鹉学舌”的语言机器,而是开始扮演机器人背后那个进行深思熟虑、规划未来的复杂推理引擎。让我们深入探索 LLM 是如何逐步成为机器人导航领域的游戏规则改变者,以及它们所依赖的核心规划与反思机制。
LLM 在机器人导航中的核心角色:不只是“听懂”,更是“想明白”
在 VLN 任务中,LLM 承担了多个至关重要的认知功能,使其不仅仅是指令的接收者,更是任务的理解者和规划者:
-
指令理解与语义接地(Instruction Understanding & Semantic Grounding): LLM 的核心优势在于其深厚的语言知识。它们能够解析复杂、甚至略带口语化的自然语言指令,理解其中的实体(“水瓶”、“咖啡机”)、空间关系(“旁边”、“上面”)和动作意图(“拿下”)。更关键的是,需要将这些抽象的语言概念与机器人通过传感器(主要是摄像头)感知的具体物理世界**“接地”**(Grounding),即将“咖啡机”这个词与视野中那个特定的物体对应起来。像 DiscussNav 这样的框架,甚至使用了多个专门的 LLM“专家”进行“讨论”,以确保对复杂指令歧义的准确消解。
-
高层路径规划(High-Level Path Planning): 仅仅理解目标还不够,机器人需要知道“怎么去”。LLM 可以充当策略大脑,将最终目标分解为一系列逻辑上连贯的高层步骤或子目标。例如,对于“去书房把灯打开”的指令,LLM 可能规划出:“1. 导航到走廊尽头的门。2. 进入书房区域。3. 定位书桌。4. 找到台灯并交互(打开)。” 像 NavGPT 项目就展示了 LLM 如何基于当前视觉观察和导航历史进行推理,制定这些宏观计划,并识别沿途的关键地标以辅助导航。
-
复杂行程拆解(Sub-Task Identification & Decomposition): 当指令涉及多个步骤或跨越较长距离时(例如,“先去楼下客厅拿我的眼镜,然后送到楼上卧室床头柜上”),LLM 擅长自动识别并排序所需的子任务序列。这种能力对于处理现实世界中常见的长程、多阶段任务至关重要。一些研究,如 LHPR-VLN,甚至可以通过向 GPT-4 提供精心设计的提示(Prompt),让其在没有专门针对此任务进行训练(零样本 Zero-shot)的情况下,就能生成合理的子任务列表。
-
常识推理与环境感知(Commonsense Reasoning & Environmental Awareness): 真实世界导航充满了不确定性和隐含信息。“把杯子放在桌子中间”,这个“中间”在哪里?“沙发附近”是多近?LLM 预训练过程中吸收的海量文本数据赋予了它们丰富的常识知识,可以用来推断这些模糊表达的含义,理解物体通常出现的位置(例如,微波炉通常在厨房),或者预测环境中未直接观察到的部分。NavGPT 就利用了这种常识来指导导航决策和判断任务进度。更有趣的是,LLM 甚至可以充当**“世界模型”**,在执行一个动作之前,“想象”或预测采取该动作后可能看到的景象,然后基于这个预测选择最优的下一步行动,NavCoT 项目就探索了这种基于预测的决策方式。
本质上,LLM 在 VLN 中既是连接语言指令与视觉现实的**“解释器”,又是规划整体路线和子任务的“战略家”**,为机器人的每一步行动提供持续的推理和决策支持。
核心规划策略:LLM 如何像人一样“思考”导航路径?
那么,LLM 是如何实现上述这些复杂的规划和推理功能的呢?研究者们从人类认知科学中汲取灵感,开发了一系列方法来激发和引导 LLM 的“思考”能力。这些方法,可以大致归纳为两大核心思路:任务分解和自我反思。
1. 任务分解:化繁为简,步步为营
面对一个庞大或复杂的目标,最高效的方式往往是将其拆解成一系列更小、更易于管理和执行的步骤。LLM 在 VLN 中也采用了类似的策略:
-
链式思考(Chain-of-Thought, CoT): 这是激发 LLM 推理能力的基础技术之一。通过在提示中加入简单的引导语,如“Let’s think step by step.”(让我们一步步来思考),可以促使 LLM 在给出最终答案(例如,下一个动作)之前,先生成一个详细的、中间的推理过程。这个过程可能包括分析当前状态、回忆目标、评估选项等。这种显式的推理链不仅提高了答案的准确性(尤其是在需要数学、符号或常识推理的任务中),也让模型的决策过程更加透明和可解释。CoT 在符号推理、常识推理和计算推理任务中表现良好。
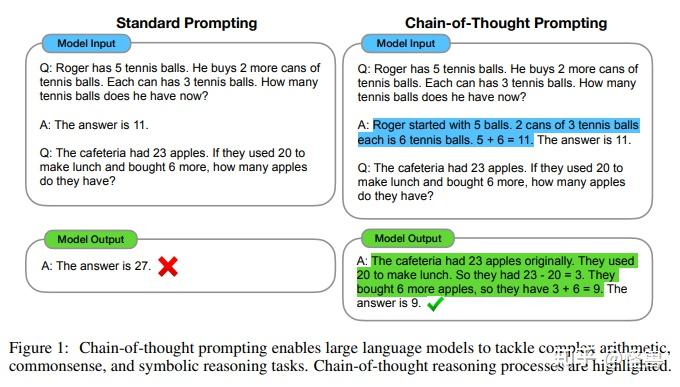
- VLN 应用: NavCoT 的工作方式就体现了 CoT 的思想。在决定行动前,LLM 会整合历史信息、当前观察,并生成一个关于下一步该怎么走的“思考”过程。
-
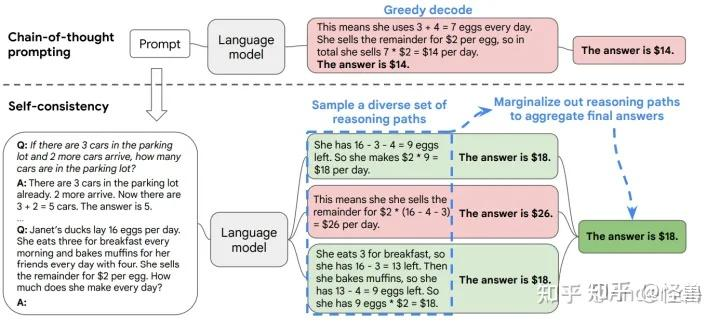
多路径探索与决策优化(Self-Consistency / Tree-of-Thoughts, ToT): 单一的思考链可能出错或陷入局部最优。
-
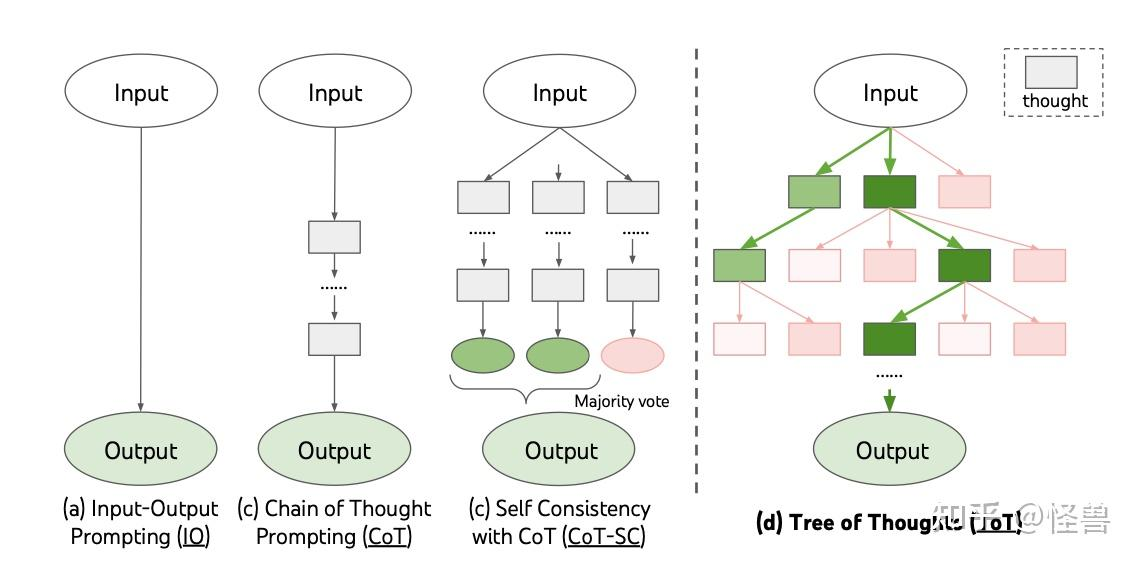
CoT-SC (Self-Consistency): 这种方法通过让 LLM 对同一个问题生成 多个 独立的 CoT 推理链,然后通过“投票”等方式选择最一致或最频繁出现的最终答案,从而提高结果的鲁棒性。这就像让多个“思考者”独立思考,然后取多数意见。
-
ToT (Tree-of-Thoughts): 作为一种更主动的探索策略,ToT 不仅仅生成线性思考链,而是构建一个“思维树”。在树的每个节点(代表一个中间思考状态),LLM 会生成多个可能的下一步“想法”(潜在的推理步骤或子目标)。然后,LLM(或一个外部评估器)会对这些想法进行评估(例如,判断其可行性、是否更接近目标)。只有最有希望的想法会被扩展,形成新的分支。这种方法允许系统性地探索复杂的解空间,通过类似广度优先(BFS)或深度优先(DFS)的搜索策略,找到更优的解决方案。
-
VLN 应用: 虽然直接实现完整 ToT 的 VLN 系统尚不多见,但 DiscussNav 的“多专家讨论”机制就蕴含了类似的思想:不同的 LLM 专家从不同角度(指令理解、环境分析、进度跟踪)提出“看法”,并通过交流达成共识,共同决定最佳行动,这体现了对不同“思路”的综合考量。
-
-
分阶段规划与执行(Plan-and-Act): 这种策略将复杂的 VLN 任务明确地分为两个阶段。首先,一个规划器(通常是 LLM)负责宏观规划,输出一个结构化的行动计划(例如,一系列子目标或关键导航点)。然后,一个执行器(可能是另一个专门的导航模型,或者一套基于规则的控制逻辑)负责专注于精确地执行计划中的每一步。这种模块化的设计有助于分解复杂性,让 LLM 专注于其擅长的高层推理,而执行细节则交给更专业的模块。
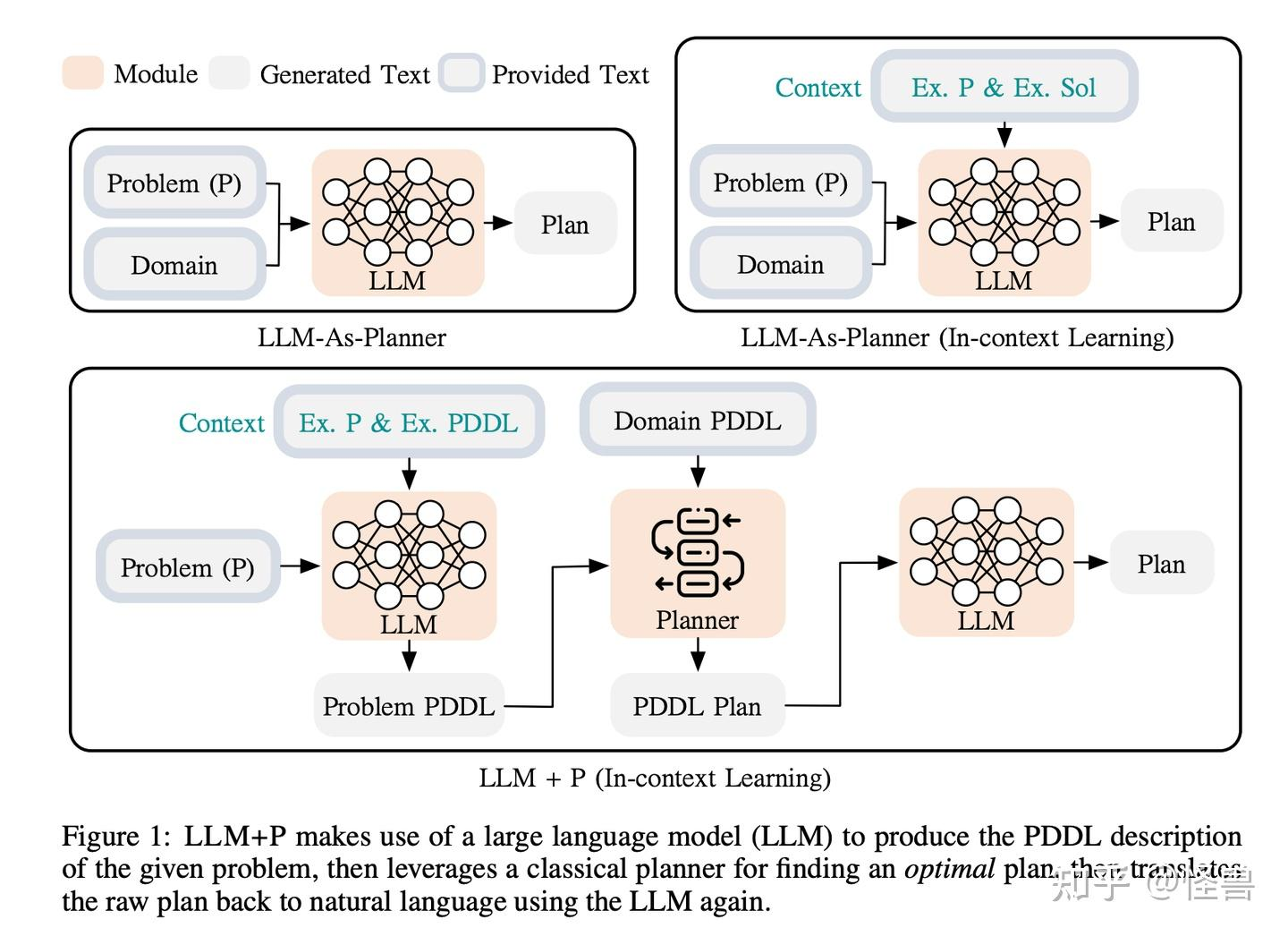
- VLN 应用: LHPR-VLN 就是一个典型例子,它使用 GPT-4 作为零样本规划器生成子任务列表,然后由一个独立的导航模型来执行这些子任务。 LLM+P 思想也属于此类,它甚至建议让 LLM 生成形式化的规划描述(如 PDDL 语言),然后利用经典的、保证最优性的规划器来求解长程规划问题,最后再由 LLM 将规划结果翻译回自然语言或机器人动作。
-
基于提示的任务分解(Prompt-Based Decomposition): 有时候,无需复杂的架构调整,仅仅通过巧妙设计向 LLM 提出的提示(Prompt),就能引导其自行完成任务分解。
- VLN 应用: LHPR-VLN 使用简单的提示就能让 GPT-4 识别子任务。而 苏格拉底式规划器(Socratic Planner) 则更进一步,它采用了一种交互式的、自我提问的方式。LLM 被提示通过问自己一系列关键问题(例如,“最终目标物体是什么?” “它可能在哪个房间?” “我应该先去哪个区域探索?”)来逐步细化和分解原始指令,最终形成一个详细的行动计划。
2. 自我反思与适应调整:从经验和反馈中学习
导航过程中难免会遇到障碍、走错路或环境与预期不符。优秀的导航系统需要具备从错误中学习和动态调整策略的能力,LLM 同样可以被赋予这种“反思”能力:
-
推理-行动-观察循环(ReAct - Reason + Act): 它将推理(Thought)和行动(Act)紧密地交织在一个迭代循环中:LLM 首先思考(Reason)当前状况和下一步计划 -> 然后生成一个具体的行动(Act)指令给机器人 -> 机器人执行动作后返回一个观察(Observation)结果(例如,新的视觉景象或传感器读数)-> LLM 接收这个观察结果,并将其作为下一步思考的输入,开始新的循环。这个“思考-行动-观察”的闭环使得 LLM 能够根据实时的环境反馈不断调整其推理和行动策略。
- VLN 应用: NavCoT 就明确采用了类似 ReAct 的循环模式,LLM 在每一步都会整合历史、观察、进行思考、预测(想象)动作后果,然后才输出行动指令。
-
反思失败与修正(Reflexion / Chain of Hindsight, CoH): 当一个行动序列导致失败(例如,未能找到目标,或者走进了死胡同)时,仅仅重新规划可能不够。
- Reflexion: Reflexion 框架赋予了 AI Agent 动态记忆和自我反思的能力。当一次尝试(一个 episode)失败后,LLM 会被引导对这次失败的轨迹进行反思,生成关于“为什么会失败”以及“下次应该如何改进”的文字总结。这些反思结果会被存储起来,并在下一次尝试相同或类似任务时作为额外的上下文信息提供给 LLM,帮助它避免重蹈覆辙。这种机制类似于人类从错误中吸取教训的过程。
- Chain of Hindsight (CoH): CoH 是一种通过特定**微调(Fine-tuning)**方法来让 LLM 从反馈中学习的技术。其核心思想是构建一种特殊的训练数据格式,其中包含了问题、一个“坏答案”、一个“好答案”,以及可能的反馈信息。模型被训练来预测这个完整的序列。通过这种方式,模型不仅学会了生成好的输出,也学会了识别和理解为什么某些输出是“坏”的,并从中学习如何改进。
3. 增强规划能力:引入外部知识源
除了依赖自身内部的知识和推理能力,LLM 的规划还可以通过整合外部信息源得到增强:
- 利用地图进行全局规划(Map-Assisted Planning): LLM 本身是“无状态”且“无空间感”的,主要处理文本序列。但如果给它提供一个关于环境的地图呢?MapGPT 项目在这方面做了开创性的工作。当机器人在环境中探索时,它会实时构建一个简化的拓扑地图(表示关键位置节点及其连接关系)。然后,这个地图信息会被转换成文本格式,并直接包含在发送给 LLM 的提示中。有了这张“心像地图”,LLM 就能更好地进行全局路径规划,理解空间布局,避免在局部区域兜圈子,从而显著提高导航的成功率。
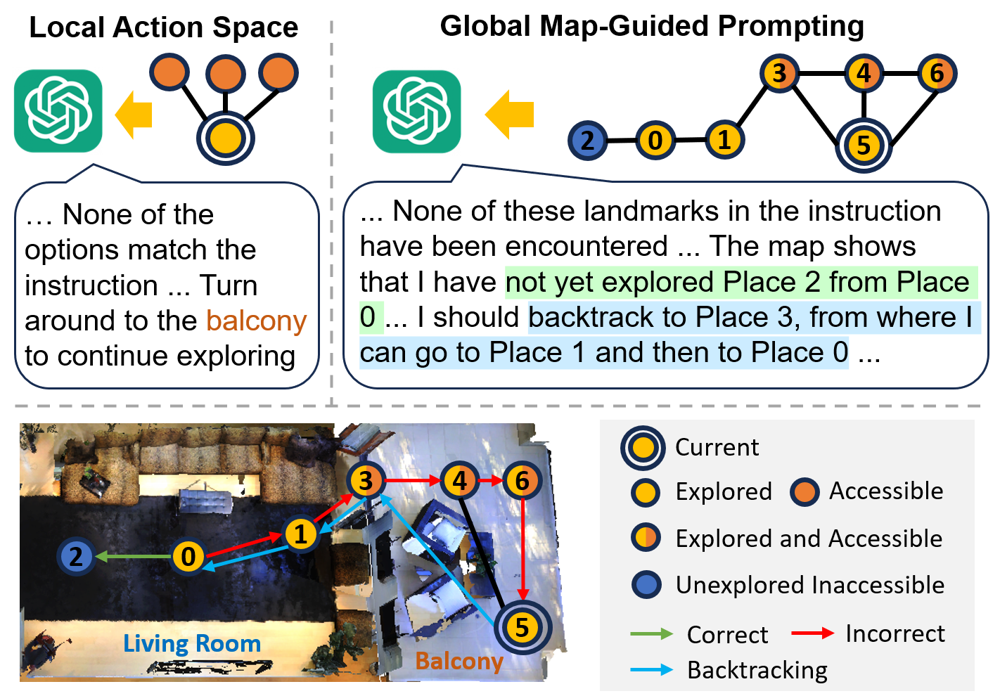
图1:MapGPT 示例。左侧无地图时 GPT-4 规划缺乏全局视野导致迷路(红),右侧整合地图信息后 GPT-4 规划出更优的全局路径(绿)。
通过综合运用这些任务分解、自我反思和外部信息增强策略,LLM 正在逐步克服传统导航方法的局限,展现出更加智能、灵活和接近人类水平的导航决策能力。
弥合差距:连接 LLM 的“大脑”与机器人的“眼睛”和“腿”
一个关键问题是:主要处理文本的 LLM 如何与机器人所处的物理世界互动?如何将抽象的语言指令和规划与具体的视觉感知和物理动作联系起来?这需要建立有效的桥梁:
-
将视觉信息转化为文本(Vision-to-Text Conversion): 这是最直接的方式。机器人当前的视觉观察(摄像头图像)可以通过各种技术转换成 LLM 能够理解的文本形式。
- 基本描述: 可以是简单的物体列表(“看到桌子、椅子、窗户”),或者由图像描述模型(Image Captioning Models)生成的自然语言描述(“一个放着笔记本电脑的木制书桌”)。
- 结构化信息: 更进一步,可以使用视觉模型提取更结构化的信息,例如:
- 物体检测与定位: 使用像 RAM (Recognize Anything Model) 这样的模型检测视野中的物体及其大致位置。
- 场景图(Scene Graphs): 如 MMSG 论文所述,构建描述物体及其相互关系的图结构(例如,“[杯子]–[放在]–[桌子]上”)。
- 视觉问答(VQA)/详细描述: 使用像 InstructBLIP(DiscussNav 中使用)这样的多模态模型,可以根据需要生成关于场景特定方面的非常详细的描述。
- 历史信息整合: 如 Tsai et al. 的工作所示,将一系列历史观察(文本化后的)也提供给 LLM,为其提供导航过程中的时序上下文。
- 地图信息: 如 MapGPT,将构建的拓扑地图也编码为文本输入。
-
利用常识与外部知识库(Leveraging World Knowledge):
- LLM 内在知识: NavGPT 等研究强调,LLM 本身存储的大量关于世界运作方式的常识就是一个宝贵的资源,可以直接用于推理。
- 外部知识接入: 可以将 LLM 与外部的结构化知识库(例如,ConceptNet)或预先构建的语义地图(Semantic Maps,存储环境中物体类别、位置、属性等信息)连接起来,为 LLM 提供更准确、更具体的环境知识,辅助其进行决策。
通过这些技术,研究者们正努力让 LLM 的强大文本推理能力有效地**“接地气”(Grounding)**到机器人所处的复杂、动态的物理现实中。
付诸实践:系统构建、效果评估与工程挑战
将这些基于 LLM 的 VLN 想法转化为实际可运行的系统,需要扎实的工程工作和标准化的评估流程。
-
系统架构与开源工具: 一个典型的 LLM-based VLN 系统通常由以下模块组成:
- 模拟器(Simulator): 提供逼真的 3D 环境和物理引擎,供机器人在其中进行虚拟导航。常用的有 Habitat (基于 Matterport3D, Gibson 等真实扫描数据集)、AI2-THOR 等。
- 感知模块(Perception Module): 处理来自模拟器(或真实机器人摄像头)的视觉输入。通常使用预训练的视觉编码器,如 ResNet、ViT(Vision Transformer),或者更先进的多模态模型如 BLIP、CLIP。
- 文本化/提示构建模块(Textualization/Prompting Module): 将感知模块的输出(以及历史信息、地图等)转换成适合输入给 LLM 的文本提示。
- 大语言模型模块(LLM Module): 核心的推理和规划单元。可以是商业 API(如 GPT-4, Claude),也可以是开源模型(如 LLaMA, Mixtral)或在其基础上进行微调的模型(如 NaviLLM)。它接收提示,生成思考过程或下一步行动。
- 执行模块(Execution Module): 将 LLM 输出的抽象动作(如 “go forward”, “turn left”, “find table”)转换为模拟器或机器人底层控制器可以理解的具体指令(例如,前进 0.25 米,左转 30 度)。
- 开源促进: 值得庆幸的是,许多重要的研究项目都公开了他们的代码库,极大地促进了社区的发展。NavCoT、NavGPT、NaviLLM、MapGPT 和 DiscussNav 等都有公开的 GitHub 仓库,方便其他研究者复现、改进和构建新的应用。
-
衡量成功的标尺:数据集与评估指标
- 常用“练兵场”(Datasets):
- R2R (Room-to-Room): VLN 的经典基准,使用 Matterport3D 数据集中的真实室内环境扫描,任务是根据人类书写的指令在房间间导航。
- REVERIE: 关注“远程目标导向”导航,即指令通常描述一个远处的物体,机器人需要找到它并执行一个动作(如停在旁边)。
- RxR (Room-across-Room): 特点是包含更长、更自然的导航指令,并且是多语种的(英语、印地语、泰卢固语),还提供了指令与路径段之间的细粒度对齐信息。
- 关键“度量衡”(Evaluation Metrics):
- 成功率 (SR, Success Rate): 最核心的指标,衡量机器人最终停止位置是否在目标点的一定半径内(通常是 3 米)。简单直接,判断任务是否基本完成。
- 路径长度加权成功率 (SPL, Success weighted by Path Length): 不仅要求成功,还要求效率。计算公式大致为
SR * (最优路径长度 / 实际路径长度)。如果机器人绕了远路,即使成功,SPL 得分也会降低。奖励又快又准的导航。 - 归一化动态时间规整 (nDTW, Normalized Dynamic Time Warping): 衡量机器人实际轨迹与人类示范的参考轨迹在形状上的相似度。DTW 是一种计算两条序列相似度的方法,归一化后使其不受路径长度影响。nDTW 越低,表示机器人走的路线越接近人类的走法。
- 成功加权 DTW (SDTW, Success weighted DTW): 结合了 SR 和 nDTW。只计算成功导航的路径的 nDTW,并乘以 SR。综合评价导航的成功率和路径的“自然度”或“合理性”。
- 长距离/子任务指标 (Long-Horizon/Sub-task Metrics): 对于像 LHPR-VLN 这样将任务分解为子目标的研究,需要新的指标来评估中间过程的完成情况,例如独立成功率 (ISR, Independent Success Rate),即每个子任务独立完成的百分比。
指标 含义与侧重点 目标值 成功率 (SR) 是否到达目标区域?(基础成功) 越高越好 SPL 是否高效到达目标?(成功 + 效率) 越高越好 nDTW 路径形状是否像人类?(路径保真度,与成功无关) 越低越好 SDTW 成功的路径是否像人类?(成功 + 路径保真度) 越低越好 ISR (子任务) 分解的每个子任务是否都完成了?(多阶段任务过程评估) 越高越好 - 常用“练兵场”(Datasets):
-
优化挑战:平衡性能与成本
- 当前的 SOTA (State-of-the-Art) LLM(如 GPT-4)虽然强大,但计算量巨大,推理延迟高,且运行成本昂贵(如果是通过 API 调用)。这使得它们在需要实时响应的机器人上直接部署变得非常困难。
- 优化策略:
- 模型压缩与加速:
- 参数高效微调 (PEFT): 如 LoRA (Low-Rank Adaptation),只微调模型的一小部分参数,大幅降低训练和存储成本。
- 量化 (Quantization): 将模型的权重和激活值从标准的 32 位浮点数降低到 16 位、8 位甚至 4 位整数,减少内存占用和计算量,加速推理,但可能牺牲一些精度。
- 推理优化: 使用如 vLLM、TensorRT-LLM 等推理引擎,采用 K/V 缓存、连续批处理(Continuous Batching)、算子融合等技术加速 LLM 的服务速度。
- 模型选择与部署:
- 使用更小的开源模型: 部署像 LLaMA-2-7B/13B、Mistral-7B 这样规模更小、性能尚可的开源 LLM,并在特定任务上进行微调(如 NaviLLM)。
- 混合方法: 可能使用强大的云端 LLM 进行初始规划,而使用更小的本地模型进行实时的反应式调整。
- 模型压缩与加速:
- 在 LLM 的强大规划能力与机器人平台有限的计算资源、实时性要求之间找到最佳平衡点,是一个关键的工程挑战。
前路漫漫:当前的障碍与未来的方向
尽管基于 LLM 的 VLN 已经取得了令人瞩目的进展,但距离真正鲁棒、通用、高效的机器人导航助手,仍有许多障碍需要克服:
- 指令理解的深层模糊性: 人类语言天然充满歧义、省略和依赖语境。“把它放在那个常用的架子上”——哪个架子是“常用”的?LLM 虽然常识丰富,但仍可能在理解这些细微差别和隐含意图时出错,尤其是在面对新颖或非常规的指令时。(DiscussNav 试图通过多专家讨论缓解此问题)
- 语言与视觉的对齐鸿沟(Grounding Problem): 将抽象的语言符号(如“桌子”)可靠地映射到现实世界中变化万千的视觉实例(不同样式、光照、角度、遮挡下的桌子)仍然是一个核心难题。LLM 本质上是“盲人摸象”,它们不具备真正的视觉理解能力,高度依赖于视觉模块提供的信息质量和文本化转换的准确性。(MMSG 的场景图等方法旨在提供更结构化的视觉信息以改善对齐)
- 应对语义模糊和常识偏差: 像“附近”、“面向”、“左边”(是机器人自身的左边还是环境的左边?)这类相对空间关系的处理依然困难。同时,LLM 的常识来自于训练数据(主要是网络文本),可能存在偏差,或者与特定物理环境的实际情况不符。
- 领域差异与泛化挑战(Domain Gap & Generalization):
- Sim-to-Real Gap: 大多数 VLN 研究目前主要在模拟环境中进行。将在模拟器中表现良好的模型迁移到真实世界的机器人上时,往往会因为传感器噪声、物理交互的复杂性、环境外观差异等因素而性能大幅下降。
- 泛化到新环境/任务: 当前的 VLN 数据集虽然在扩展,但仍然有限,可能无法覆盖现实世界环境的多样性。在特定数据集上训练的模型能否很好地泛化到从未见过的新环境、新布局、新物体或新的指令类型,是一个巨大的挑战。(参考 VLN 综述 [ar5iv.org/abs/2203.12667])
- 效率、成本与实时性: 如前所述,大型 LLM 的高计算需求是部署在移动机器人上的主要瓶颈,限制了其实时交互和决策能力。
- 更智能、更全面的评估方法: 当前的指标(SR, SPL, nDTW 等)主要关注最终的导航结果(是否到达、路径好坏)。如何设计更有效的评估方法,能够直接衡量 LLM 在任务分解、常识推理、规划合理性等中间过程的质量?这是一个活跃的研究领域,新的基准(如 LHPR-VLN 引入 ISR)正在尝试解决这个问题。
展望未来,研究者们正在探索以下方向,以期突破现有瓶颈:
- 更强大的视觉理解与融合: 集成更先进的 3D 视觉感知能力(深度估计、三维重建)、场景几何理解、物体关系推理、以及建立长期空间记忆模型。
- 交互式学习与澄清: 让机器人具备主动提问的能力。当指令模糊不清时,机器人可以通过与用户的多轮对话来寻求澄清(“你是指桌子上的那个红色水瓶吗?”),这类似于苏格拉底式规划器的思想,但扩展到人机交互层面。
- 效率与专用化: 通过知识蒸馏(Knowledge Distillation)将大型 LLM 的能力迁移到更小、更高效的专用导航模型上。探索更适合机器人平台的模型架构和硬件加速方案(Edge AI)。
- 更丰富的数据与更逼真的模拟: 构建更大规模、更多样化、包含更复杂交互和真实世界噪音的 VLN 数据集。同时,开发保真度更高、物理模拟更准确的模拟器,以缩小 Sim-to-Real 差距。
- 终身学习与适应: 让机器人在部署后能够持续地从新的经验中学习,适应环境的变化和用户的个性化需求。
结语:迈向真正“懂你”的导航机器人
大语言模型,凭借其无与伦比的语言理解、知识储备和日益增强的规划推理能力,正在为视觉语言导航领域注入前所未有的活力。通过扮演机器人的“中央大脑”,LLM 能够解析复杂的自然语言指令,将其分解为可执行的步骤,并利用常识知识引导机器人在未知或动态的环境中穿梭。它们所依赖的任务分解、链式思考、多路探索、自我反思等核心策略,正推动着机器人从简单的指令跟随者向具备初步“思考”能力的智能体转变。
尽管在视觉接地、泛化能力、运行效率和鲁棒性方面仍面临诸多挑战,但 LLM 与机器人感知、控制技术的深度融合,无疑正为我们铺设一条通往更智能、更具适应性、真正能够理解我们意图并提供帮助的机器人助手的道路。也许在不远的将来,“嘿,机器人,去趟厨房帮我拿水瓶”将不再是科幻想象,而是我们习以为常的日常交互。这场由 LLM 引领的导航革命,才刚刚开始。