论文笔记-多智能体任务分配:动态智能空间中的拍卖与抢占机制
《IET Cyber-Systems and Robotics》出版中国电信研究院 Wei Li、Zhenhua Liu 团队与山东大学 Jianhang Shang 和 Guoliang Liu 团队的研究成果,文章题为“Multiagent Task Allocation for Dynamic Intelligent Space: Auction and Preemption With Ontology Knowledge Graph”。
摘要:这篇论文提出了一种开创性的动态系统多智能体优化(DySOMA)框架,彻底革新了动态智能空间中的任务调度方式,尤其聚焦于多机器人系统。DySOMA的核心是一种先进的基于拍卖的算法,结合了新颖的任务抢占排序机制,并与动态更新的本体知识图谱无缝集成。这种集成不仅提升了机器人间任务分配的效率,还显著增强了系统对环境变化的适应能力。相较于其他先进算法,DySOMA算法展现出显著的性能提升——在10台机器人的场景下,其相对负载平衡(RLB)指标比表现最佳的基于共识的并行拍卖与执行(CBPAE)算法高出26.8%;在20台机器人场景下这一优势扩大至29.7%。这充分证明了DySOMA在更大规模、更复杂环境中平衡任务负载和优化任务完成时间的卓越能力。DySOMA为智能机器人任务调度树立了新的标杆,预示着机器人系统在复杂动态环境中的自主性和灵活性将实现重大突破。
在当今科技迅猛发展的时代,机器人技术已经广泛应用于军事、工业和服务领域,扮演着安全巡逻、目标搜索、地形测绘以及智能家居等重要角色。随着多机器人系统(Multirobot Systems, MRS)的普及,如何高效地进行任务分配成为研究热点。最近阅读了一篇题为《Multiagent Task Allocation for Dynamic Intelligent Space: Auction and Preemption With Ontology Knowledge Graph 》的论文,该文提出了一种名为DySOMA(Dynamic System Optimisation for Multiagent)的框架,旨在通过拍卖算法和任务抢占机制,结合本体知识图谱,提升动态智能空间中多机器人系统的任务调度效率。
背景与挑战
多机器人协同任务分配的核心在于如何在有限时间内将多个任务合理分配给不同的机器人,以实现最优的任务完成效果。这一问题本质上是一个组合优化问题,其复杂性来源于任务规模、机器人数量及其能力的多样性。传统的任务分配方法包括精确算法、遗传与进化算法、基于机器学习的方法以及规则驱动的启发式算法。然而,这些方法在处理大规模、动态变化的环境时往往存在局限性,如计算成本高、适应性差等问题。
为了应对这些挑战,DySOMA框架应运而生。该框架不仅考虑了任务分配的效率,还特别强调了系统对环境变化的适应能力。通过引入增强的拍卖竞价算法、任务抢占排名机制以及基于本体知识图谱的任务推理技术,DySOMA在动态智能空间中实现了更高效的资源分配和任务调度。
DySOMA框架的核心创新
1. 增强的拍卖竞价算法
DySOMA采用了一种改进的拍卖竞价算法,优化了任务分配过程。该算法通过一个综合的成本函数来评估每个机器人完成特定任务的可能性。成本函数由三个主要因素构成:
- 距离(Distance) :机器人到达任务点的距离。
- 任务复杂度(Task Complexity) :任务本身的难度与机器人能力之间的匹配程度。
- 负载均衡(Load Balancing) :确保各机器人之间的任务分配尽可能均衡。
通过对这三个因素进行加权求和,DySOMA能够为每个任务找到最合适的执行者。实验结果显示,这种基于成本函数的拍卖算法在任务分配效率上显著优于传统的拍卖方法。
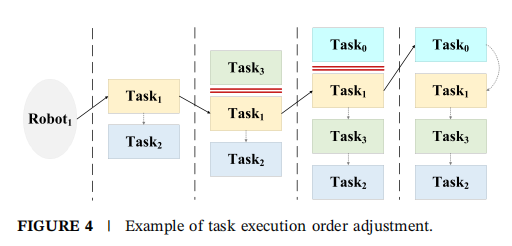
2. 任务抢占排名机制
在动态环境中,任务的优先级可能会随时发生变化。为此,DySOMA引入了一个任务抢占排名机制,允许系统根据实时环境变化和任务紧迫性动态调整任务的优先级。当一个新的高优先级任务出现时,系统可以中断当前正在进行的低优先级任务,并将资源重新分配给紧急任务。这一机制确保了系统能够在关键时刻做出快速反应,从而提高整体的任务完成效率。

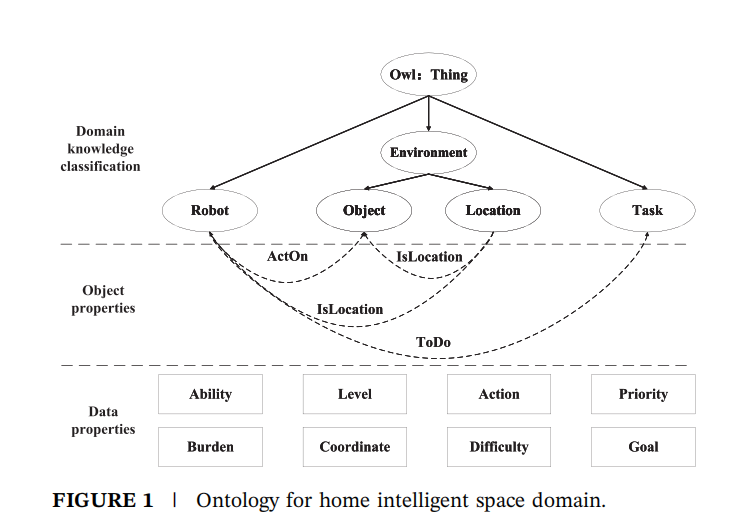
3. 本体知识图谱的集成
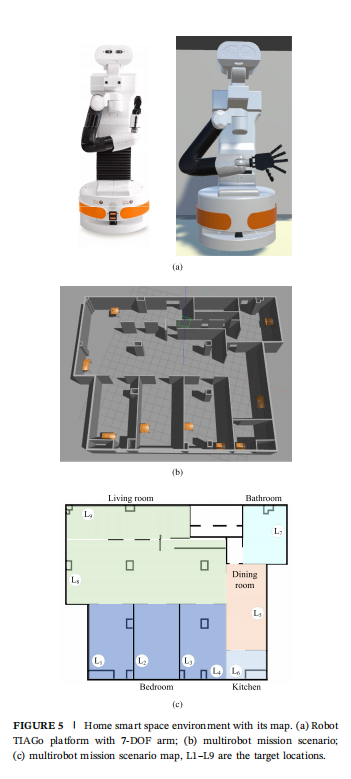
DySOMA的一个独特之处在于它与本体知识图谱的深度集成。通过构建一个基于Web本体语言(OWL)的知识图谱,系统能够对家庭智能空间中的各种实体及其关系进行建模。这不仅有助于机器人更好地理解周围的环境,还能支持实时更新和语义推理,使得任务分配更加智能化和灵活化。
例如,在智能家居场景中,知识图谱可以帮助机器人识别房间的位置、物品的状态以及用户的偏好,从而在任务分配过程中做出更合理的决策。此外,知识图谱还可以用于任务推理,帮助系统预测未来可能出现的任务需求,并提前做好准备。
实验与结果分析
为了验证DySOMA的有效性,作者进行了大量的实验,并将其与其他先进的任务分配算法(如SSI、CBPAE和ARENA)进行了对比。
实验结果表明,DySOMA在多个关键指标上表现优异:
- 机器人旅行距离(RTD) :DySOMA在减少机器人总行驶距离方面表现出色,尤其是在任务数量较多的情况下。
- 机器人负载平衡(RLB) :通过动态调整任务分配,DySOMA显著提高了机器人之间的负载均衡度,避免了某些机器人过载而其他机器人闲置的情况。
- 任务完成时间(TCT) :DySOMA在缩短任务完成时间方面也具有明显优势,特别是在处理大量任务时。
具体而言,DySOMA在10个机器人和20个机器人的测试中,分别比CBPAE算法提升了26.8%和29.7%的RLB性能。这充分证明了DySOMA在大规模、复杂环境下的优越性。
对未来研究的启示
尽管DySOMA已经在任务分配领域取得了显著成果,但仍有进一步改进的空间。例如,如何将该框架扩展到更大规模的机器人团队?如何结合先进的机器学习技术来提升任务分配的智能性?这些都是值得深入探讨的问题。
此外,未来的研究还可以关注如何将DySOMA应用于更广泛的场景,如户外环境或应急响应任务。随着机器人技术的不断发展,DySOMA有望成为下一代多机器人系统的重要基础,推动智能机器人在更多领域的应用。
结语
总的来说,《Multiagent Task Allocation for Dynamic Intelligent Space: Auction and Preemption With Ontology Knowledge Graph 》是一篇极具启发性的论文。它不仅提出了一个新颖的任务分配框架,还通过实验验证了该框架在动态智能空间中的有效性。对于从事多机器人系统研究的学者来说,这篇论文无疑提供了一个重要的参考方向,也为未来的智能机器人发展指明了道路。