【计算机视觉】CV项目实战- SiamMask 单阶段分割跟踪器
SiamMask 单阶段分割跟踪器
- 一、项目概述与技术原理
- 1.1 核心技术创新
- 1.2 性能优势
- 二、实战环境搭建
- 2.1 系统要求与依赖安装
- 2.2 项目编译与配置
- 三、模型推理实战
- 3.1 快速体验Demo
- 3.2 常见运行时错误处理
- 四、模型训练指南
- 4.1 数据准备流程
- 4.2 训练执行与监控
- 五、高级应用与优化
- 5.1 模型部署优化
- 5.2 实际应用案例
- 六、项目资源汇总
- 6.1 关键文件说明
- 6.2 扩展学习资源
一、项目概述与技术原理
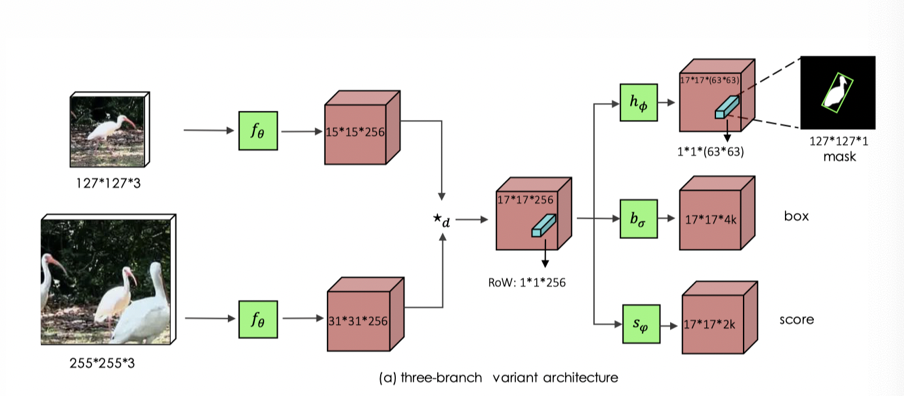
SiamMask是牛津大学视觉几何组(VGG)提出的开创性视觉目标跟踪算法,发表于CVPR 2019。该项目创新性地将目标跟踪和视频对象分割统一到一个端到端的框架中,实现了实时高性能的视觉跟踪解决方案。
1.1 核心技术创新
SiamMask基于改进的孪生网络架构,主要包含三大关键技术:
-
多分支预测头:
- 分类分支:判断目标位置
- 回归分支:预测精确边界框
- 掩码分支:生成像素级分割掩码
-
特征共享机制:
# 伪代码示例 def forward(self, template, search):z_feat = self.backbone(template) # 模板特征提取x_feat = self.backbone(search) # 搜索区域特征提取# 共享特征的多任务预测cls_pred = self.cls_head(z_feat, x_feat)reg_pred = self.reg_head(z_feat, x_feat)mask_pred = self.mask_head(z_feat, x_feat)return cls_pred, reg_pred, mask_pred -
实时优化设计:
- 单次前向传播完成所有预测
- 轻量级Refine模块提升掩码质量
- 56 FPS的实时性能(RTX 2080)
1.2 性能优势
| 数据集 | 指标 | 性能 |
|---|---|---|
| VOT2018 | EAO | 0.380 |
| DAVIS2017 | J&F (Mean) | 0.564 |
| YouTube-VOS | Global Accuracy | 0.602 |
二、实战环境搭建
2.1 系统要求与依赖安装
基础环境配置:
# 创建conda环境
conda create -n siammask python=3.6
conda activate siammask# 安装PyTorch 0.4.1 (CUDA 9.2)
pip install torch==0.4.1 torchvision==0.2.1# 安装其他依赖
pip install -r requirements.txt
常见问题解决方案:
| 问题现象 | 原因分析 | 解决方案 |
|---|---|---|
ImportError: No module named 'cv2' | OpenCV未安装 | pip install opencv-python |
CUDA runtime error (35) | CUDA版本不匹配 | 确认CUDA 9.2安装正确,或修改make.sh中的CUDA路径 |
undefined symbol: _ZN2at5ErrorC1ENS_14SourceLocationESs | PyTorch版本冲突 | 完全卸载PyTorch后重装指定版本:pip install torch==0.4.1 torchvision==0.2.1 |
2.2 项目编译与配置
# 克隆项目
git clone https://github.com/Eligahxueyu/SiamMask_master.git
cd SiamMask_master# 编译扩展模块
bash make.sh# 设置环境变量
export PYTHONPATH=$PWD:$PYTHONPATH
编译问题排查:
- 若
make.sh失败,检查CUDA_HOME路径是否正确 - 出现
undefined reference错误时,尝试make clean后重新编译
三、模型推理实战
3.1 快速体验Demo
步骤详解:
-
下载预训练模型:
cd experiments/siammask_sharp wget http://www.robots.ox.ac.uk/~qwang/SiamMask_DAVIS.pth -
运行视频演示:
python ../../tools/demo.py \--resume SiamMask_DAVIS.pth \--config config_davis.json \--video path/to/your/video.mp4
参数调优技巧:
--penalty_k:控制尺度变化惩罚因子(默认0.04)--lr:在线更新学习率(建议0.4-0.6)--window_influence:余弦窗影响系数(0.4-0.6)
3.2 常见运行时错误处理
| 错误类型 | 诊断方法 | 解决方案 |
|---|---|---|
| CUDA out of memory | 监控nvidia-smi显存使用情况 | 降低输入分辨率(修改config.json中的"size")或减小batch size |
| KeyError: ‘state_dict’ | 检查模型文件MD5值 | 重新下载官方模型,确保文件完整 |
| 跟踪框漂移 | 分析失败帧的响应图 | 调整penalty_k和window_influence参数,或启用–mask_refine选项 |
四、模型训练指南
4.1 数据准备流程
标准数据集处理:
# 数据集目录结构示例
data/
├── coco
│ ├── train2017
│ └── annotations
├── ytb_vos
│ ├── train
│ └── valid
└── vid├── ILSVRC2015_VID_train_0000└── ILSVRC2015_VID_train_0001
数据增强配置:
// config.json片段
{"augmentation": {"random_crop": {"padding": 10,"max_ratio": 0.3},"color_jitter": {"brightness": 0.2,"contrast": 0.2,"saturation": 0.2}}
}
4.2 训练执行与监控
启动训练命令:
cd experiments/siammask_sharp
bash run.sh ../siammask_base/checkpoint.pth
训练过程监控:
- TensorBoard可视化:
tensorboard --logdir=logs --port=6006 - 关键监控指标:
loss/total_loss:总损失值loss/mask_loss:掩码分支损失speed/fps:训练速度
训练问题排查:
| 训练异常 | 可能原因 | 调试方法 |
|---|---|---|
| Loss出现NaN | 学习率过大/梯度爆炸 | 1. 降低学习率 2. 添加梯度裁剪( --clip参数)3. 检查数据归一化 |
| 验证指标不提升 | 过拟合/数据噪声 | 1. 增加数据增强 2. 早停机制 3. 检查标签质量 |
| GPU利用率低 | 数据加载瓶颈 | 1. 增加--num_workers2. 使用SSD存储 3. 启用pin_memory |
五、高级应用与优化
5.1 模型部署优化
ONNX转换示例:
import torch
from models.siammask import SiamMaskmodel = SiamMask(pretrained='SiamMask_DAVIS.pth')
dummy_input = torch.randn(1, 3, 255, 255)
torch.onnx.export(model, dummy_input, "siammask.onnx", verbose=True)
推理加速方案:
- TensorRT优化:FP16精度可提升30%速度
- OpenVINO优化:适用于Intel CPU部署
- 模型剪枝:减少通道数实现轻量化
5.2 实际应用案例
无人机跟踪系统集成:
class DroneTracker:def __init__(self, model_path):self.model = load_model(model_path)self.state = Nonedef init(self, frame, bbox):self.model.init(frame, bbox)def update(self, frame):pred_mask, bbox = self.model.track(frame)return {'mask': pred_mask,'bbox': bbox,'fps': self.model.fps}
优化建议:
- 针对特定场景(如无人机)微调模型
- 融合IMU数据提升鲁棒性
- 开发低延迟视频传输管道
六、项目资源汇总
6.1 关键文件说明
SiamMask_master/
├── experiments/ # 实验配置
│ ├── siammask_base/ # 基础模型
│ └── siammask_sharp/ # 带Refine模块
├── tools/
│ ├── demo.py # 演示脚本
│ └── eval.py # 评估脚本
└── utils/├── config.py # 配置解析└── logger.py # 训练日志
6.2 扩展学习资源
- 原论文精读:arXiv:1812.05050
- 改进方案:
- UpdateNet:在线更新模块
- SiamR-CNN:结合检测思想
- 相关项目:
- Ocean:基于SiamMask的改进版
- SiamBAN:更高效的预测头设计
通过本指南的系统学习,开发者可以快速掌握SiamMask的核心技术,并能够根据实际需求进行二次开发和优化。项目提供的完整工具链从训练到部署的全流程支持,使其成为视觉跟踪领域极具实用价值的研究平台。