影像数据处理
影像数据处理
- 数据理解
- 图片数据
- 图片数据的特征
- 图片数据的性质
- 数据预处理
- 降噪
- 什么是噪声?
- 均值滤波
- 中值滤波
- 仿射变换 (AffineTransform)
- 灰度变换
- 对数&幂次变换
- 直方图均衡
- 代数域变换
- Mosaic数据增强
- 自适应图片缩放
- CV数据增强方法汇总
- 数据可视化
- 结语
影像数据处理是计算机视觉和图像分析的基础。无论是训练AI模型还是优化图片质量,理解数据特征并掌握预处理技术都至关重要。本文将从数据理解和数据预处理两大方向出发,带你系统学习了解影像数据处理的核心方法。
数据理解
图片数据
图片数据由像素矩阵构成,每个像素包含颜色信息(如RGB三通道)。常见的格式包括JPEG、PNG、BMP等,不同格式在压缩方式、透明通道支持等方面各有优劣。

图片数据的特征
-
分辨率:图像的宽高像素数(如1920×1080),直接影响清晰度。 -
颜色深度:每个像素的颜色信息位数(如8位、24位),决定色彩丰富度。 -
通道类型:RGB(彩色)、灰度(单通道)等,影响数据维度。 -
元数据:EXIF信息(拍摄设备、时间等),可能包含重要上下文。
图片数据的性质
局部相关性:单独的像素值没有意义,相邻的像素值组合在一起形成特征。平移不变性:图片的特征不受位置的影响。
数据预处理
降噪
降噪的过程就是在减少干扰信息的过程。
什么是噪声?
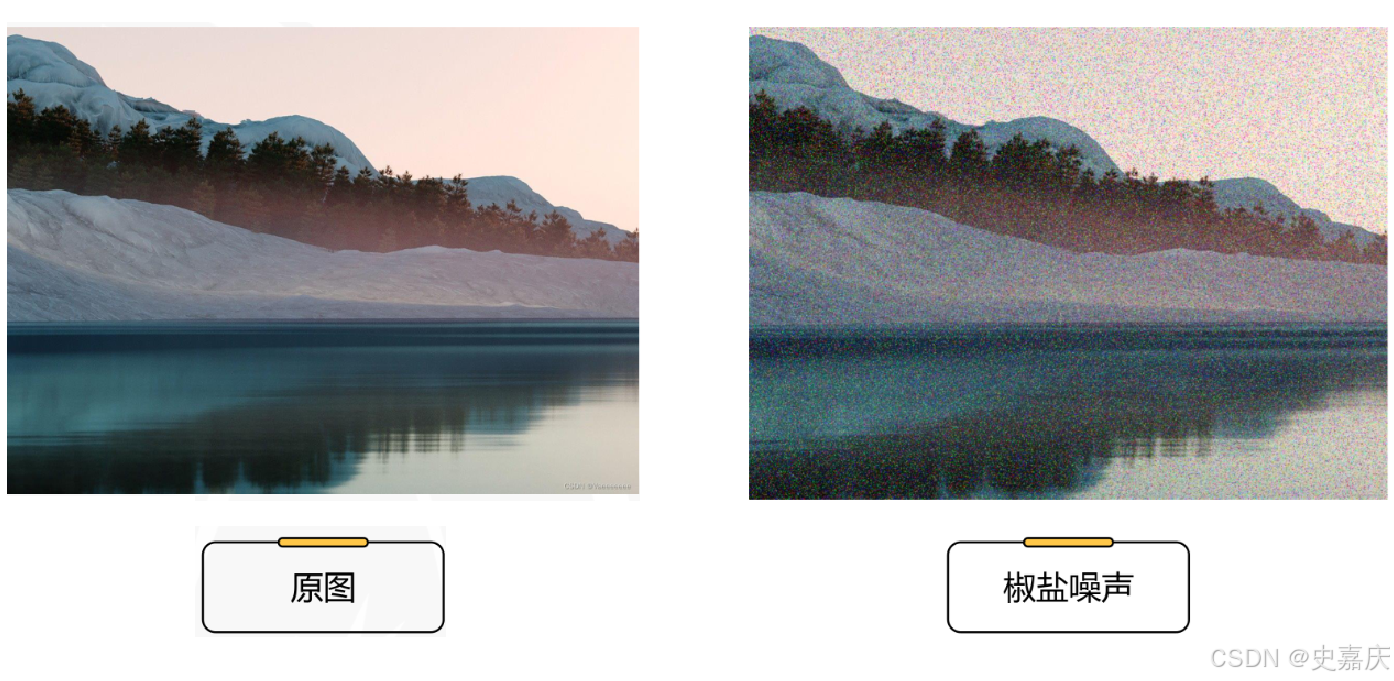
噪声是图像中非真实的随机干扰,常见类型包括高斯噪声和椒盐噪声。下面两幅图可以直观感受一下两种噪声对图像的影响。
高斯噪声:由传感器发热引起,呈正态分布。
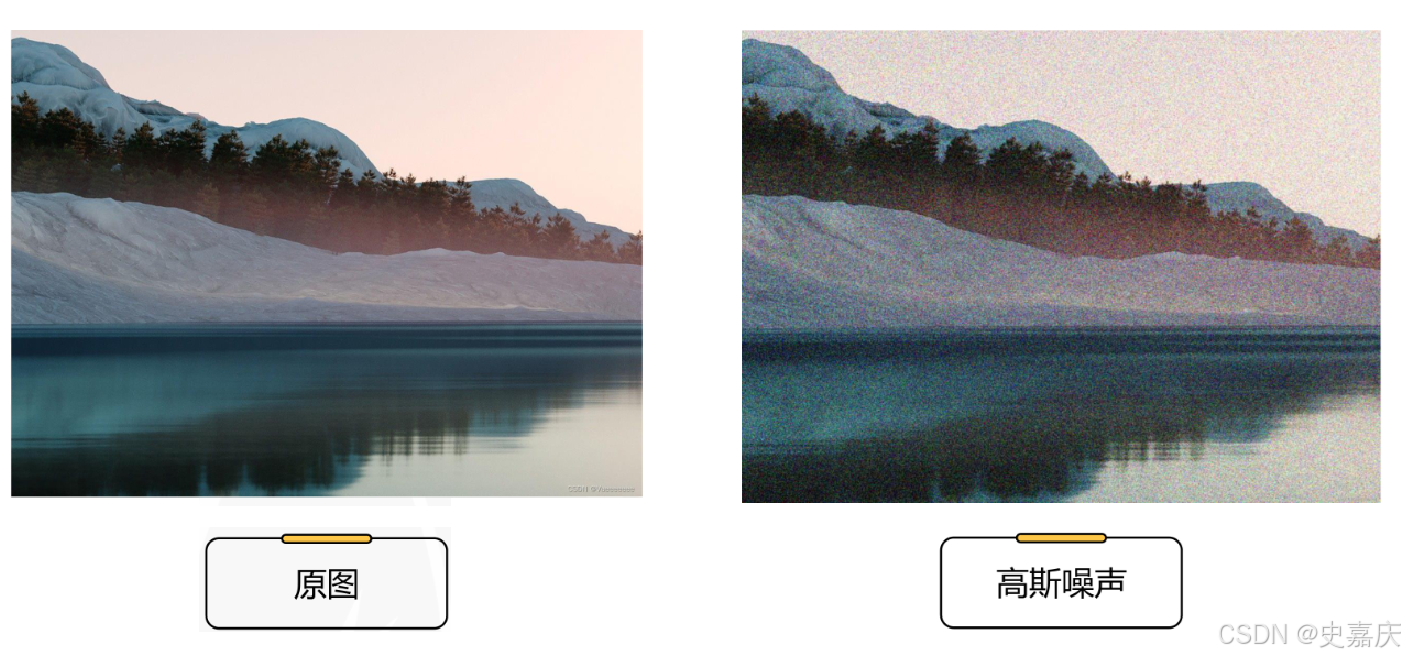
椒盐噪声:随机黑白像素点,常见于传输错误。
接下来介绍两种常见的去除这两种噪声的方式,分别是均值滤波和中值滤波。
均值滤波
基本原理:用邻域像素平均值替代中心像素,平滑噪声但可能导致模糊。
公式解析:均值滤波的图像去噪原理
公式定义
f ^ ( x , y ) = 1 m n ∑ ( r , c ) ∈ s x y g ( r , c ) (1) \hat{f}(x,y) = \frac{1}{mn} \sum_{(r,c) \in s_{xy}} g(r,c) \tag{1} f^(x,y)=mn1(r,c)∈sxy∑g(r,c)(1)
- 输入:带噪声的图像 g ( r , c ) g(r,c) g(r,c)
- 输出:复原后的图像 f ^ ( x , y ) \hat{f}(x,y) f^(x,y)
- 窗口:以 ( x , y ) (x,y) (x,y) 为中心、大小为 m × n m \times n m×n 的矩形子窗口 s x y s_{xy} sxy 。
核心思想:局部平均化
均值滤波是一种线性空间滤波方法,其核心是通过对噪声图像中每个像素的邻域像素取平均值,抑制随机噪声。具体步骤为:
- 滑动窗口:在噪声图像 g g g 上,以每个待处理像素 ( x , y ) (x,y) (x,y) 为中心,定义一个 m × n m \times n m×n 的矩形窗口。
- 计算均值:将窗口内所有像素的灰度值相加,再除以像素总数 m × n m \times n m×n,结果作为复原图像中 ( x , y ) (x,y) (x,y) 处的新值。
数学意义
- 噪声平滑:假设噪声是随机分布的(如高斯噪声),通过取邻域均值,噪声的正负波动会部分抵消,从而降低噪声强度。
- 模糊代价:均值滤波会模糊图像细节(如边缘、纹理),因为高频信号(细节)也被平均化了。
实例说明
假设窗口大小为 3 × 3 3 \times 3 3×3,噪声图像局部如下:
| 50 | 55 | 48 |
|---|---|---|
| 52 | 200 | 53 |
| 49 | 54 | 51 |
- 原始中心像素:200(噪声点)
- 均值计算: 50 + 55 + 48 + 52 + 200 + 53 + 49 + 54 + 51 9 ≈ 68.9 \frac{50+55+48+52+200+53+49+54+51}{9} \approx 68.9 950+55+48+52+200+53+49+54+51≈68.9
- 复原结果:中心像素值从 200 降为 68.9,噪声被抑制,但周围像素也被平滑。
| 50 | 55 | 48 |
|---|---|---|
| 52 | 68.9 | 53 |
| 49 | 54 | 51 |
应用场景与局限性
- 适用场景:高斯噪声、轻微随机噪声。
- 局限性:
- 对椒盐噪声效果差(极端值会显著影响均值)。
- 导致图像模糊,边缘信息丢失。
- 改进方法:
- 中值滤波:取邻域中值,更适合椒盐噪声。
- 自适应滤波:根据局部噪声强度动态调整窗口大小。
边界处理
当窗口靠近图像边缘时,部分像素可能超出图像范围,常用处理方式包括:
- 补零:超出部分填充0。
- 镜像填充:复制边缘像素值。
- 截断窗口:仅使用图像内的像素计算均值。
可以看出,其实在边缘处理方面,均值滤波的效果并不是很好。
均值滤波通过“以空间换质量”的策略,用图像局部平滑性抑制噪声,是图像预处理中最基础的算法之一。尽管简单高效,但需权衡去噪强度与细节保留,实际应用中常与其他方法(如非局部均值滤波)结合使用以优化效果。
中值滤波
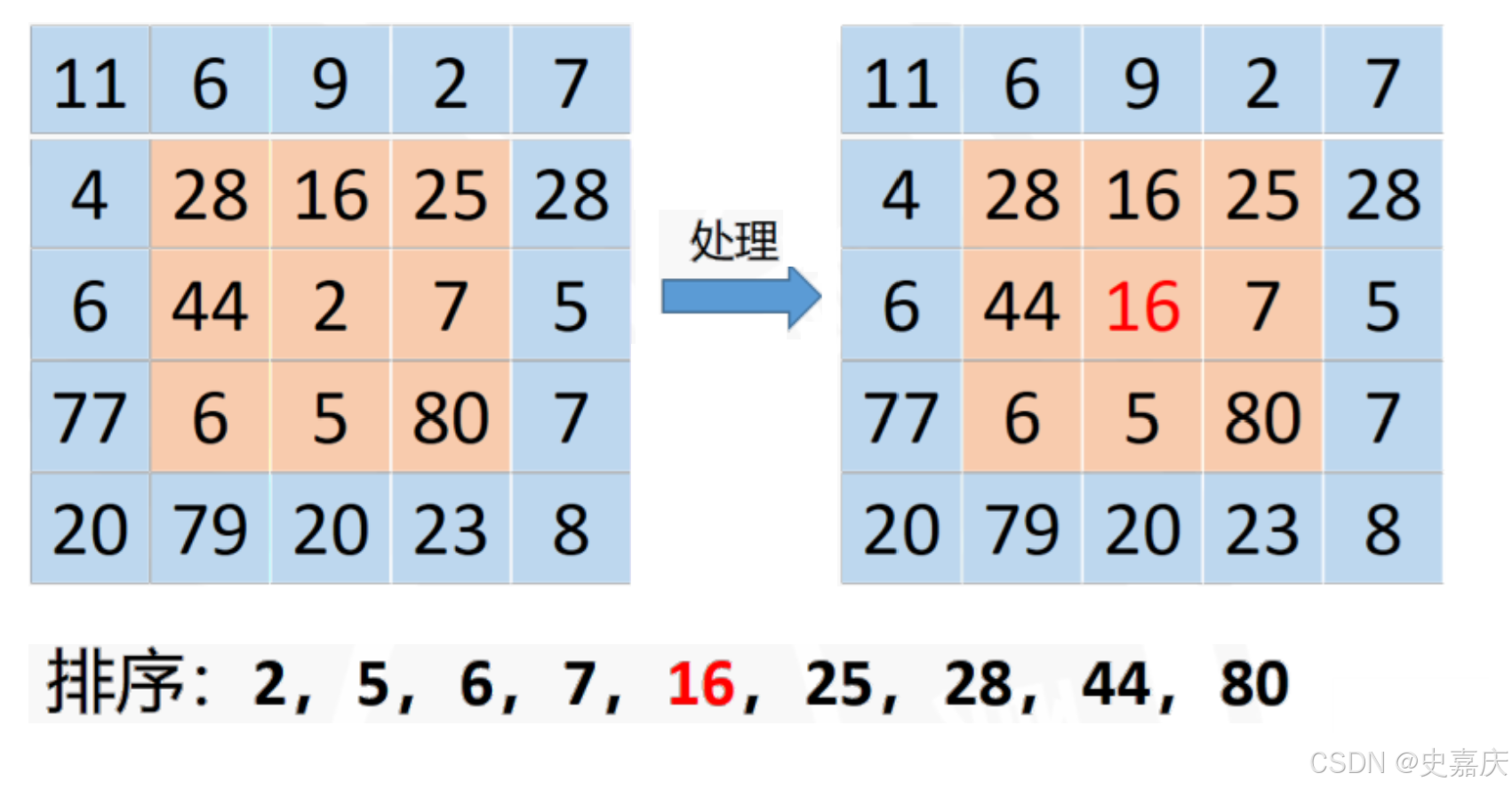
核心思想:用一个滑动窗口遍历图像的每个像素,用窗口内像素的中值来替代中心像素的值。
- 🐳感性地理解一下,椒盐噪声是由于随机的黑白小点产生的,而
黑和白在计算机图像中存储起来无非就是255,0这样最极端的值,所以我们排完序取中值就可以将这些噪点滤去。
仿射变换 (AffineTransform)
OpenCV中的仿射变换是一种基于线性变换和平移组合的图像几何变换方法,其核心原理如下:
1. 仿射变换的数学基础
仿射变换可以用 2 × 3 2 \times 3 2×3 矩阵 表示,形式为:
M = [ a b c d e f ] M = \begin{bmatrix} a & b & c \\ d & e & f \end{bmatrix} M=[adbecf]
其作用是将原始坐标 ( x , y ) (x, y) (x,y) 映射到新坐标 ( x ′ , y ′ ) (x', y') (x′,y′):
x ′ = a ⋅ x + b ⋅ y + c y ′ = d ⋅ x + e ⋅ y + f x' = a \cdot x + b \cdot y + c \\ y' = d \cdot x + e \cdot y + f x′=a⋅x+b⋅y+cy′=d⋅x+e⋅y+f
若用齐次坐标( 3 × 3 3 \times 3 3×3 矩阵),则可统一平移和线性变换:
[ x ′ y ′ 1 ] = [ a b c d e f 0 0 1 ] [ x y 1 ] \begin{bmatrix} x' \\ y' \\ 1 \end{bmatrix} = \begin{bmatrix} a & b & c \\ d & e & f \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} ⎣⎡x′y′1⎦⎤=⎣⎡ad0be0cf1⎦⎤⎣⎡xy1⎦⎤
2. 仿射变换的六自由度
仿射变换矩阵包含 6 个自由度,对应以下基本变换的组合:
- 平移(Translation):由 ( c ) (c) (c) 和 ( f ) (f) (f)控制。
- 旋转(Rotation):由 ( a , b , d , e ) (a, b, d, e) (a,b,d,e) 组成的旋转矩阵部分。
- 缩放(Scaling):由对角线元素 ( a , e ) (a, e) (a,e) 控制。
- 剪切(Shearing):由非对角线元素 ( b , d ) (b, d) (b,d) 控制。
3. OpenCV中的关键函数
-
cv2.getAffineTransform(src_points, dst_points)
根据 3 组点对 计算仿射变换矩阵。
原理:通过解线性方程组确定 6 个参数。
要求:3 组点必须非共线,否则矩阵不可逆。 -
cv2.warpAffine(src, M, dsize)
应用仿射矩阵 (M) 对图像进行变换。dsize:输出图像的尺寸。- 支持填充选项(如
borderMode和borderValue)。
4. 仿射变换的特性
- 保持平行性:变换后平行线仍保持平行。
- 不保持角度和长度:旋转、缩放、剪切会改变这些属性。
- 适用场景:图像校正、图像配准、简单形变(如平移、旋转、倾斜)。
6. 示例代码
import cv2
import numpy as np# 定义原始点和目标点(3组非共线点)
src_points = np.float32([[50,50], [200,50], [50,200]])
dst_points = np.float32([[10,100], [200,50], [100,250]])# 计算仿射变换矩阵
M = cv2.getAffineTransform(src_points, dst_points)# 应用变换
img_transformed = cv2.warpAffine(img, M, (width, height), borderValue=(255,255,255))# 仿射变换矩阵 M:
# [[ 1.26666667 0.6 -83.33333333]
# [ -0.33333333 1. 66.66666667]]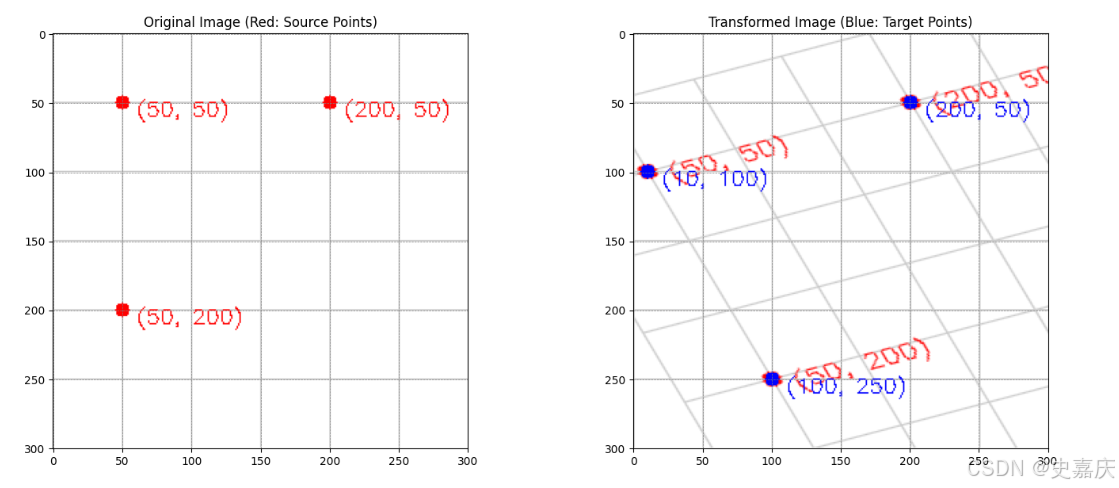
7. 注意事项
- 若目标点共线,会导致矩阵计算失败(返回空矩阵)。
- 变换后超出图像边界的部分默认填充黑色,可通过
borderValue自定义颜色。 - 对于复杂形变(如非仿射变换),需使用透视变换(
cv2.getPerspectiveTransform)。
注:
- 所有变换均使用齐次坐标,形式为 [ x ′ y ′ 1 ] = M ⋅ [ x y 1 ] (2) \begin{bmatrix}x' \\ y' \\ 1\end{bmatrix} = M \cdot \begin{bmatrix}x \\ y \\ 1\end{bmatrix} \tag{2} ⎣⎡x′y′1⎦⎤=M⋅⎣⎡xy1⎦⎤(2)
其中 x ′ x' x′是变换后的x, y ′ y' y′是变换后的y, M M M如下
M = [ R 00 R 01 T x R 10 R 11 T y 0 0 1 ] M= \begin{bmatrix} R_{00} & R_{01} & T_x \\ R_{10} & R_{11} & T_y \\ 0 & 0 & 1 \end{bmatrix} M=⎣⎡R00R100R01R110TxTy1⎦⎤
1. 恒等变换(无变化)
[ 1 0 0 0 1 0 0 0 1 ] (3) \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} \tag{3} ⎣⎡100010001⎦⎤(3)
2. 平移变换(Translate)
平移量: [ 1 0 T x 0 1 T y 0 0 1 ] (4) \begin{bmatrix} 1 & 0 & T_x \\ 0 & 1 & T_y \\ 0 & 0 & 1 \end{bmatrix} \tag{4} ⎣⎡100010TxTy1⎦⎤(4)

3. 绕原点旋转变换(Rotate about origin)
旋转角度: θ \theta θ
[ cos θ − sin θ 0 sin θ cos θ 0 0 0 1 ] (5) \begin{bmatrix} \cos\theta & -\sin\theta & 0 \\ \sin\theta & \cos\theta & 0 \\ 0 & 0 & 1 \end{bmatrix} \tag{5} ⎣⎡cosθsinθ0−sinθcosθ0001⎦⎤(5)
4. 沿x方向剪切(Shear in x direction)
剪切因子: k k k
[ 1 k 0 0 1 0 0 0 1 ] \begin{bmatrix} 1 & k & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} ⎣⎡100k10001⎦⎤
5. 反射变换
-
关于x轴反射(Reflect about x-axis)
[ 1 0 0 0 − 1 0 0 0 1 ] \begin{bmatrix} 1 & 0 & 0 \\ 0 & -1 & 0 \\ 0 & 0 & 1 \end{bmatrix} ⎣⎡1000−10001⎦⎤ -
关于y轴反射(Reflect about y-axis)
[ − 1 0 0 0 1 0 0 0 1 ] \begin{bmatrix} -1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} ⎣⎡−100010001⎦⎤ -
关于原点反射(Reflect about origin)
[ − 1 0 0 0 − 1 0 0 0 1 ] \begin{bmatrix} -1 & 0 & 0 \\ 0 & -1 & 0 \\ 0 & 0 & 1 \end{bmatrix} ⎣⎡−1000−10001⎦⎤
上述这些变换具体细节可以不用了解,opencv已经封装好了现成的方法。在本篇的数据可视化部分有代码实现。
灰度变换
- 先直观感受一下灰度变换带来的变化。
灰度变换是图像处理中用于增强图像对比度或调整亮度的一种基础技术,通过对每个像素的灰度值进行数学映射来改善视觉效果。
以下是几种常见的灰度变换方法:
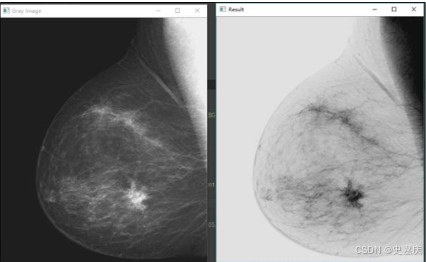
- 图像反转
对于灰度级为 L − 1 L-1 L−1的图像数据
公式: s = L − 1 − r s = L-1 - r s=L−1−r
- 原理:将原灰度值 r r r 取反,使得黑色变为白色,白色变为黑色,中间灰度值相应反转。
- 作用:
增强图像中暗区域的细节,适用于医学图像或夜间摄影的增强。
- 线性变换
公式: s = A ⋅ r + B s = A \cdot r + B s=A⋅r+B
- 参数意义:
A A A控制对比度 A > 1 A > 1 A>1 增强对比度, A < 1 A < 1 A<1 降低对比度。
B B B 控制亮度 B > 1 B > 1 B>1 增加亮度, B < 0 B < 0 B<0 降低亮度。 - 应用:整体调整图像的亮度和对比度,如提升过暗图像的细节。
- 分段线性变换
公式:
s = { c a ⋅ r , 0 ≤ r < a d − c b − a ⋅ ( r − a ) + c , a ≤ r ≤ b M − d N − b ⋅ ( r − b ) + d , b < r ≤ N s = \begin{cases} \frac{c}{a} \cdot r, & 0 \leq r < a \\ \frac{d - c}{b - a} \cdot (r - a) + c, & a \leq r \leq b \\ \frac{M - d}{N - b} \cdot (r - b) + d, & b < r \leq N \end{cases} s=⎩⎪⎨⎪⎧ac⋅r,b−ad−c⋅(r−a)+c,N−bM−d⋅(r−b)+d,0≤r<aa≤r≤bb<r≤N
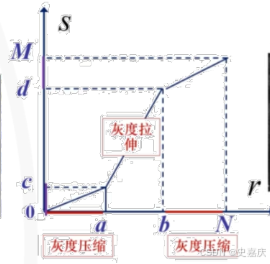
- 参数意义:
- ( a , b ) (a, b) (a,b):输入灰度区间的分割点。
- ( c , d ) (c, d) (c,d):输出灰度区间的对应值。
- N N N:输入最大灰度值,如 L − 1 L-1 L−1
- M M M:输出最大灰度值。
- 作用:
- 低灰度区 0 ≤ r < a 0 \leq r < a 0≤r<a:通过斜率 c a \frac{c}{a} ac 扩展或压缩对比度。
- 中灰度区 a ≤ r ≤ b a \leq r \leq b a≤r≤b:斜率 d − c b − a \frac{d - c}{b - a} b−ad−c 决定对比度调整方向。
- 高灰度区 b < r ≤ N b < r \leq N b<r≤N:斜率 M − d N − b \frac{M - d}{N - b} N−bM−d 控制亮部细节。
- 应用:灵活增强特定灰度范围的细节,如同时突出暗部和高光区域。
- 灰度拉伸
- 原理:通过分段线性变换中的斜率调整,扩展某一灰度范围的对比度。例如,将原本集中在狭窄区间的灰度拉伸到更广范围,提升图像层次感。
- 典型场景:处理低对比度图像(如雾天拍摄的图片),增强整体清晰度。
灰度变换的核心是通过函数映射重新分配像素灰度值。图像反转和线性变换适用于全局调整,而分段线性变换和灰度拉伸则支持局部优化,可根据需求定制不同区域的对比度和亮度,广泛应用于医学成像、遥感图像增强等领域。
对数&幂次变换
灰度变换是数字图像处理的核心技术之一,通过数学映射关系调整像素灰度值,从而增强图像对比度、优化视觉效果。对数变换与幂次变换是两种经典的非线性灰度变换方法。
一、幂次变换(伽马变换)
- 数学公式
s = c ⋅ r γ s = c \cdot r^\gamma s=c⋅rγ
- 参数说明:
- r r r:原始灰度值(范围: 0 ≤ r ≤ L − 1 0 \leq r \leq L-1 0≤r≤L−1,如8位图像为0~255)。
- s s s:变换后灰度值。
- c c c:归一化常数,通常取 c = L − 1 ( L − 1 ) γ c = \frac{L-1}{(L-1)^\gamma} c=(L−1)γL−1,确保输出范围与输入一致。
- γ \gamma γ(伽马值):控制灰度分布的压缩或拉伸方向。
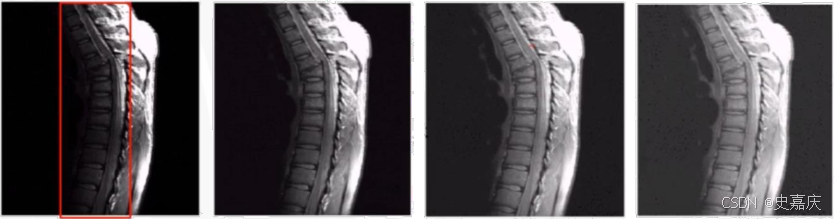
- 伽马值的影响
| 伽马值 | 作用效果 | 适用场景 |
|---|---|---|
| γ > 1 \gamma > 1 γ>1 | 压缩低灰度区域,拉伸高亮度区域。 图像整体变暗,突出亮部细节。 | X光片增强、高光细节修复 |
| γ < 1 \gamma < 1 γ<1 | 拉伸低灰度区域,压缩高亮度区域。 图像整体变亮,增强暗部层次。 | 核磁共振图像、低照度照片优化 |
| γ = 1 \gamma = 1 γ=1 | 退化为线性变换 s = c ⋅ r s = c \cdot r s=c⋅r。 | 均匀调整对比度 |
如下图,是人体上部脊椎骨折核磁共振图像,左边第一幅图为原始图片,暗部比较重。其余3张图片不同程度增强了暗部层次。从左往右依次 γ = 0.6 , 0.4 , 0.3 \gamma=0.6,0.4,0.3 γ=0.6,0.4,0.3
二、对数变换
- 数学公式
s = c ⋅ log ( 1 + r ) s = c \cdot \log(1 + r) s=c⋅log(1+r)
- 参数说明:
- log ( 1 + r ) \log(1 + r) log(1+r):避免 r = 0 r = 0 r=0时计算结果为负无穷。
- c c c:缩放常数,通常取 c = L − 1 log ( 1 + L − 1 ) c = \frac{L-1}{\log(1 + L-1)} c=log(1+L−1)L−1。例如,8位图像中 L = 256 L=256 L=256,则 c ≈ 45.9 c \approx 45.9 c≈45.9。
- 核心作用
- 压缩高光区域:对数函数增长缓慢,抑制过曝的高亮度像素。
- 扩展暗部细节:低灰度值被非线性拉伸,提升暗区可见性。
- 应用场景
- 天文图像处理:增强微弱星光的细节,压缩明亮恒星的过曝区域。
- 傅里叶频谱图增强:扩展低频分量,压缩高频噪声。
三、对比与优化技巧
- 方法对比
| 特性 | 幂次变换 | 对数变换 |
|---|---|---|
| 核心公式 | s = c ⋅ r γ s = c \cdot r^\gamma s=c⋅rγ | s = c ⋅ log ( 1 + r ) s = c \cdot \log(1 + r) s=c⋅log(1+r) |
| 适用场景 | 动态调整局部对比度 | 压缩高动态范围图像 |
| 参数敏感度 | 伽马值需精细调节(易影响噪声) | 常数 c c c 影响输出范围 |
-
幂次变换:
- γ < 1 \gamma < 1 γ<1 时,需注意暗部噪声可能被放大,建议结合滤波处理。
- 结合直方图均衡化,可进一步提升全局对比度。
-
对数变换:
- 适用于处理传感器捕获的高动态范围(HDR)图像。
- 调整 c c c 时需确保输出灰度值落在有效区间内(如0~255)。
-
幂次变换擅长针对性调整明暗区域的对比度,广泛应用于医学影像和显示设备校正。
-
对数变换则更适用于扩展暗部细节并抑制高光溢出,是处理低曝光或高动态范围图像的利器。
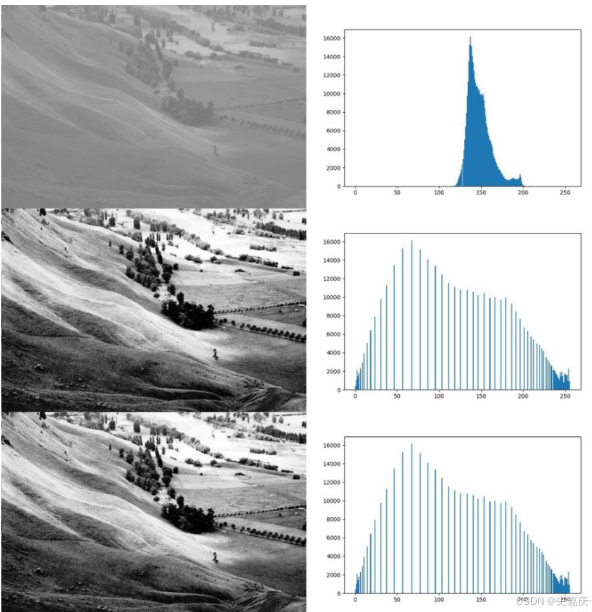
直方图均衡
一、什么是直方图均衡?
直方图均衡(Histogram Equalization) 是一种通过重新分配图像像素灰度值来增强图像对比度的技术。其核心目标是解决以下两类问题:
- 灰度级动态范围窄:图像灰度值集中在狭窄区间,导致整体对比度低。
- 直方图分布不均匀:某些灰度级像素数量过多或过少,细节难以辨识。
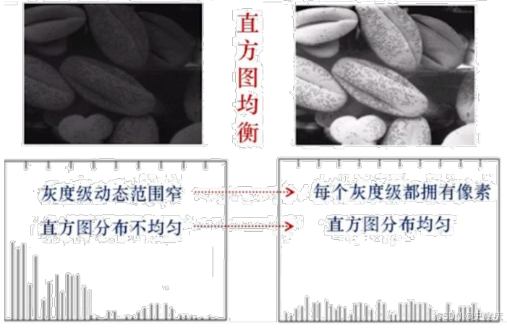
通过将原始直方图调整为近似均匀分布,直方图均衡能够扩展灰度范围,显著提升图像的视觉效果和信息利用率。
二、直方图均衡的原理与步骤
- 核心思想
将原始图像的累积分布函数(CDF)映射为线性函数,使输出直方图近似均匀分布。 - 数学公式
- 输入图像:灰度范围为 [ 0 , L − 1 ] [0, L-1] [0,L−1](如8位图像为0~255)。
- 输出灰度值 s k s_k sk:
s k = ( L − 1 ) ⋅ ∑ i = 0 k n i N s_k = (L-1) \cdot \sum_{i=0}^{k} \frac{n_i}{N} sk=(L−1)⋅i=0∑kNni
其中:- n i n_i ni:灰度级 i i i 的像素数量。
- N N N:图像总像素数。
- ∑ i = 0 k n i N \sum_{i=0}^{k} \frac{n_i}{N} ∑i=0kNni:灰度级 k k k 的累积分布概率。
3 . 实现步骤
- 统计原始直方图:计算每个灰度级的像素数量 n i n_i ni。
- 计算累积分布概率:对每个灰度级 k k k,累加 n 0 + n 1 + ⋯ + n k N \frac{n_0 + n_1 + \dots + n_k}{N} Nn0+n1+⋯+nk。
- 映射到新灰度级:将累积概率乘以 L − 1 L-1 L−1,四舍五入得到输出灰度值 s k s_k sk。
- 生成均衡化图像:将原图中每个像素替换为对应的 s k s_k sk。
三、直方图均衡的应用场景
- 低对比度图像增强
- 示例:医学X光片、雾天拍摄的风景照。
- 效果:拉伸灰度范围,使骨骼纹理或远景细节更清晰。
- 自动化与人脸识别
- 作用:
提升人脸区域对比度,改善特征提取精度。
标准化不同光照条件下的人脸图像。
- 预处理任务
- 应用:作为图像分类、目标检测的前置步骤,减少光照差异对算法的影响。
四、直方图均衡 vs. 其他灰度变换方法
| 特性 | 直方图均衡 | 对数/幂次变换 |
|---|---|---|
| 核心目标 | 全局均匀化直方图 | 局部调整对比度 |
| 适用场景 | 灰度集中或分布不均的图像 | 动态范围压缩或特定区域增强 |
| 计算复杂度 | 较高(需统计和映射全局直方图) | 较低(仅需逐像素计算) |
| 结果可控性 | 自动调整,灵活性较低 | 手动调节参数,灵活性高 |
直方图均衡通过重新分配像素灰度值,将原始直方图转换为均匀分布,是解决低对比度问题的经典方法。尽管存在噪声敏感性和局部细节损失等局限,但其自动化、高效的特点使其在医学影像、人脸识别和工业检测中广泛应用。
- 原始直方图:集中在中间区域,呈现单峰分布。
- 均衡化后直方图:分布平坦,覆盖更广灰度范围。
代数域变换
代数域变换 是一种基于像素级数学运算的图像处理技术,通过对两幅或多幅图像的像素值进行加法、减法、乘法等操作,实现图像增强、噪声抑制、特征提取等目标。其核心思想是通过代数运算的叠加或对比,凸显或消除特定信息。
- 加法:可以去除高斯噪声
- 减法:可以分割领域,检测变化,例如下面这幅图片,刚开始人走过来时可以记录当前所有的像素值,当人消失后,再记录一次所有像素点,对比两次记录,做减法,如果不是全0的话,明显可以发现中间区域像素值变化了很多。

- 乘法: 可以加滤镜,遮罩
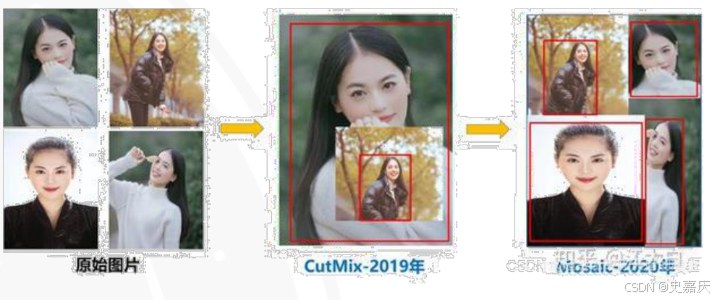
Mosaic数据增强
Mosaic数据增强 是一种基于多图拼接的图像增强技术,最早在2020年由YOLOv4目标检测模型提出并广泛应用。其核心思想是通过随机组合多张训练图像,生成一张包含丰富上下文信息的合成图像,从而提升模型对目标尺度、位置和背景多样性的适应能力。与2019年提出的CutMix方法类似,Mosaic通过混合样本增强数据多样性,但其独特的多图拼接策略使其在目标检测任务中表现尤为突出。
二、Mosaic的实现步骤
- 图像选择与缩放
从数据集中随机选取4张图像。
对每张图像进行随机缩放(如缩放至原始尺寸的20%~150%),以增加目标尺度的多样性。 - 拼接与布局
将4张缩放后的图像按左上、右上、左下、右下四个象限拼接为一张大图。
拼接时允许图像部分重叠,增强上下文关联性。 - 随机裁剪与填充
对拼接后的大图进行随机裁剪,保留目标密集区域。
若裁剪后图像尺寸不足,使用灰度填充或镜像填充补全。 - 标签调整
根据拼接和裁剪后的坐标,调整每张原始图像中目标的边界框(Bounding Box)位置。
过滤超出裁剪区域或尺寸过小的无效标注。
三、Mosaic vs. CutMix:关键差异
| 特性 | Mosaic | CutMix |
|---|---|---|
| 图像数量 | 4张图像拼接 | 2张图像区域交换 |
| 目标分布 | 多目标密集分布 | 单目标替换 |
| 适用任务 | 目标检测(YOLO系列) | 分类、检测(如ResNet) |
| 计算开销 | 较高(需处理多图拼接与复杂标签) | 较低 |
| 上下文关联 | 强(多场景混合) | 弱(局部替换) |
四、实际应用与效果
- 在YOLOv4中的应用
- 训练阶段:每批次输入图像均通过Mosaic生成,显著提升COCO数据集的检测精度(AP提升约5%)。
- 推理阶段:关闭Mosaic,直接使用原始图像测试。
- 小目标检测优化
- 案例:无人机航拍图像中,Mosaic合成多张小目标(如车辆、行人)图像,使模型mAP提升10%~15%。
- 缺陷与改进
- 问题:Mosaic可能引入不合理的上下文组合(如空中车辆+水下鱼类)。
- 解决方案:结合数据分布分析,限制拼接图像的场景一致性(如仅混合同类别图像)。
自适应图片缩放
CV数据增强方法汇总

数据可视化
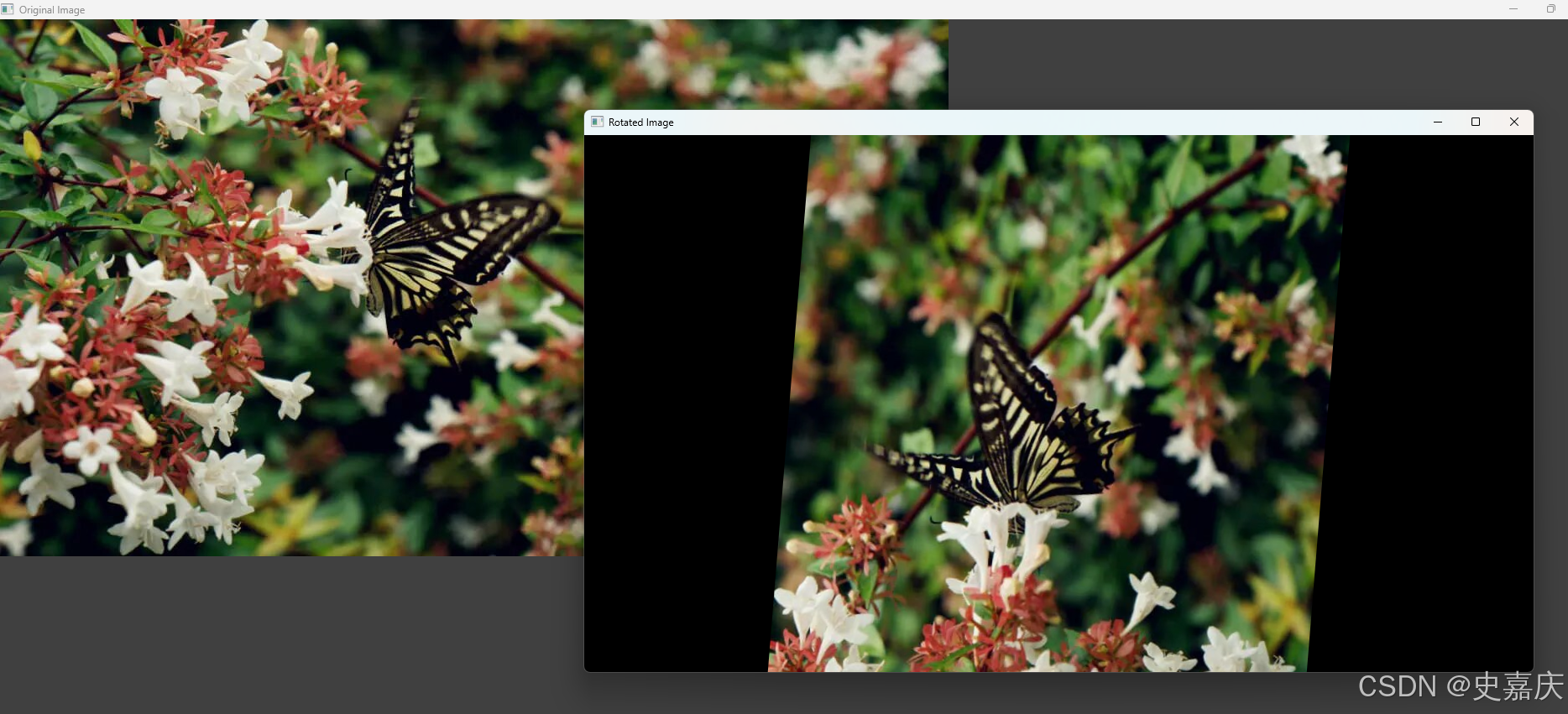
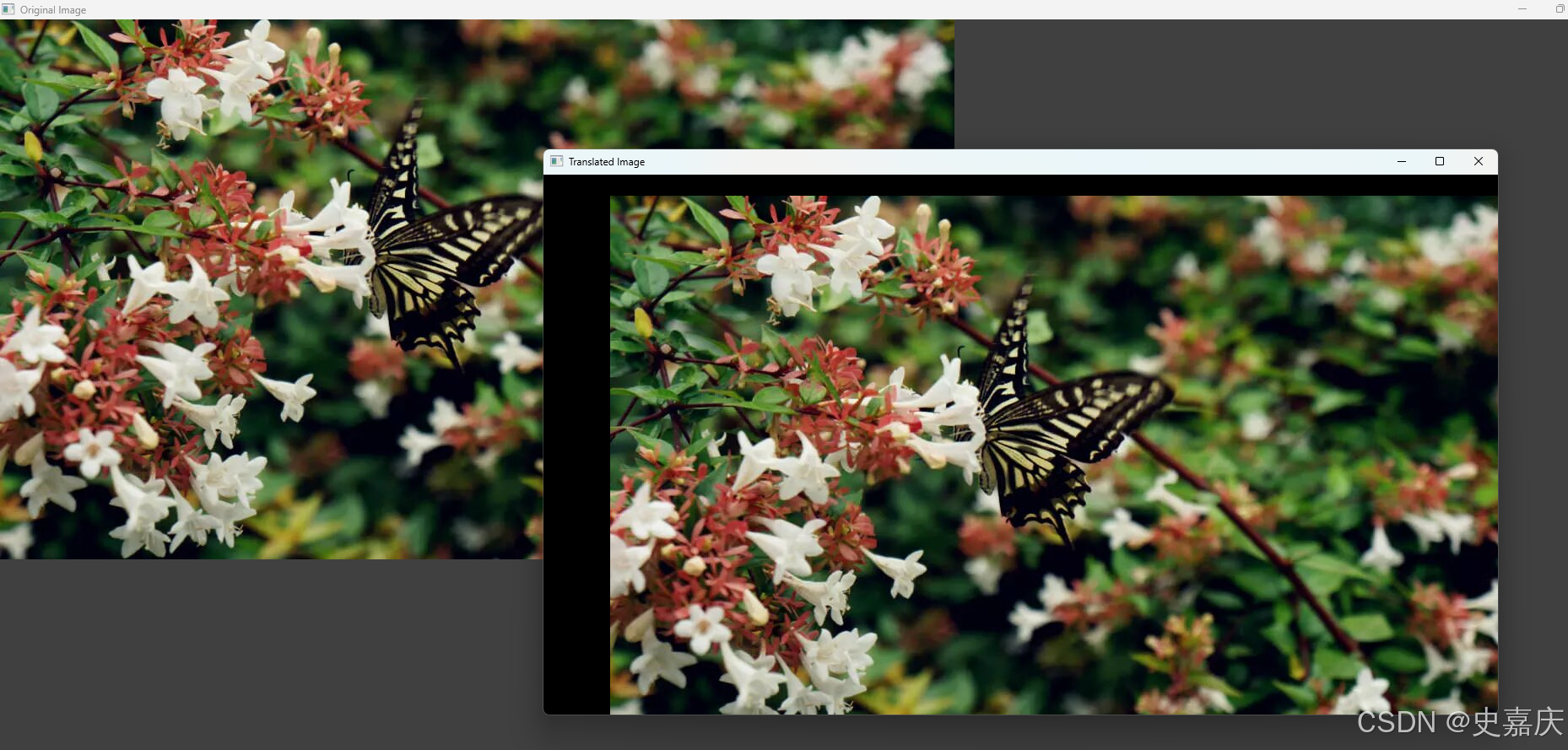
- 以这张蝴蝶在花中停留的照片为例子,结合代码观察数据处理前后图片的变化。

import cv2
import numpy as np# 图像路径
image_path = 'buttefly.jpeg'
# 载入图像
image = cv2.imread(image_path)
# 旋转 Rotation# 获取图像尺寸
(h, w) = image.shape[:2]# 设置旋转的中心为图像中心
center = (w / 2, h / 2)# 生成一个-90到90之间的随机旋转角度
angle = np.random.uniform(-90, 90)# 获取旋转矩阵,其中1.0表示图像旋转后不改变大小
rotation_matrix = cv2.getRotationMatrix2D(center, angle, 1.0)# 执行旋转操作
rotated_image = cv2.warpAffine(image, rotation_matrix, (w, h))# 显示原图和旋转后的图像
cv2.imshow('Original Image', image)
cv2.imshow('Rotated Image', rotated_image)# 按任意键退出
cv2.waitKey(0)
cv2.destroyAllWindows()
# 平移 Translation
# 获取图像的高和宽
height, width = image.shape[:2]# 随机生成平移量(注意:这里需要确保平移量不会使图像超出边界)
tx = np.random.randint(-100, 100) # 水平方向上的平移量,单位:像素
ty = np.random.randint(-100, 100) # 垂直方向上的平移量,单位:像素# 确保平移后的图像不会超出原始图像的边界
tx = max(min(tx, width-1), 0)
ty = max(min(ty, height-1), 0)# 创建仿射变换矩阵
translation_matrix = np.float32([[1, 0, tx], [0, 1, ty]])# 应用仿射变换
translated_image = cv2.warpAffine(image, translation_matrix, (width, height))# 显示或保存平移后的图像
cv2.imshow('Original Image', image)
cv2.imshow('Translated Image', translated_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 缩放 Scaling
def random_scale_image(image, scale_range=(0.5, 1.5)):"""随机缩放图像的大小。:param image: 要缩放的图像,应为numpy数组形式:param scale_range: 缩放比例的范围,默认(0.5, 1.5),即缩放后的大小在原始大小的50%到150%之间:return: 缩放后的图像"""# 生成一个随机的缩放比例scale = np.random.uniform(scale_range[0], scale_range[1])# 获取原始图像的高度和宽度height, width = image.shape[:2]# 计算缩放后的新高度和宽度new_height = int(height * scale)new_width = int(width * scale)# 使用cv2.resize()进行缩放scaled_image = cv2.resize(image, (new_width, new_height), interpolation=cv2.INTER_LINEAR)return scaled_image# 随机缩放图像
scaled_image = random_scale_image(image)# 显示缩放后的图像(如果需要)
cv2.imshow('Original Image', image)
cv2.imshow('Scaled Image', scaled_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 剪切变换 Shear Transformimport random# 步骤1:定义随机剪切参数
# 注意:这里我们假设剪切的区域不能超出原始图像的范围
shear_height = random.randint(1, height // 2) # 随机剪切高度(这里设定为图像高度的一半以下)
shear_width = random.randint(1, width // 2) # 随机剪切宽度(这里设定为图像宽度的一半以下)
start_y = random.randint(0, height - shear_height)
start_x = random.randint(0, width - shear_width)# 步骤2:剪切图像
sheared_image = image[start_y:start_y+shear_height, start_x:start_x+shear_width]# 步骤3:显示或保存剪切后的图像
cv2.imshow('Original Image', image)
cv2.imshow('Sheared Image', sheared_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
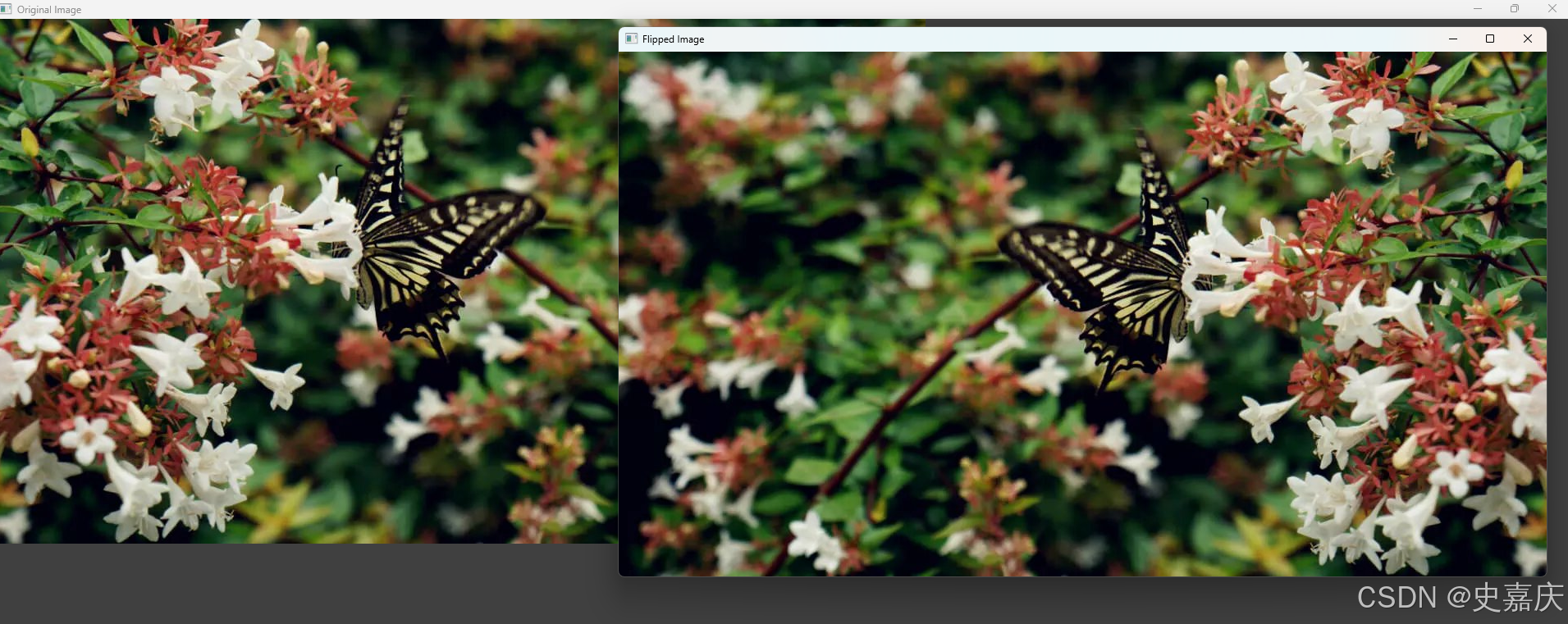
# 翻转 Flipping# 定义一个函数来随机翻转图像
def random_flip(image):# 随机选择翻转模式flip_code = random.choice([0, 1]) # 0为垂直翻转,1为水平翻转# 使用cv2.flip函数进行翻转flipped_image = cv2.flip(image, flip_code)return flipped_image# 调用函数并显示翻转后的图像
flipped_image = random_flip(image)cv2.imshow('Original Image', image)
cv2.imshow('Flipped Image', flipped_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
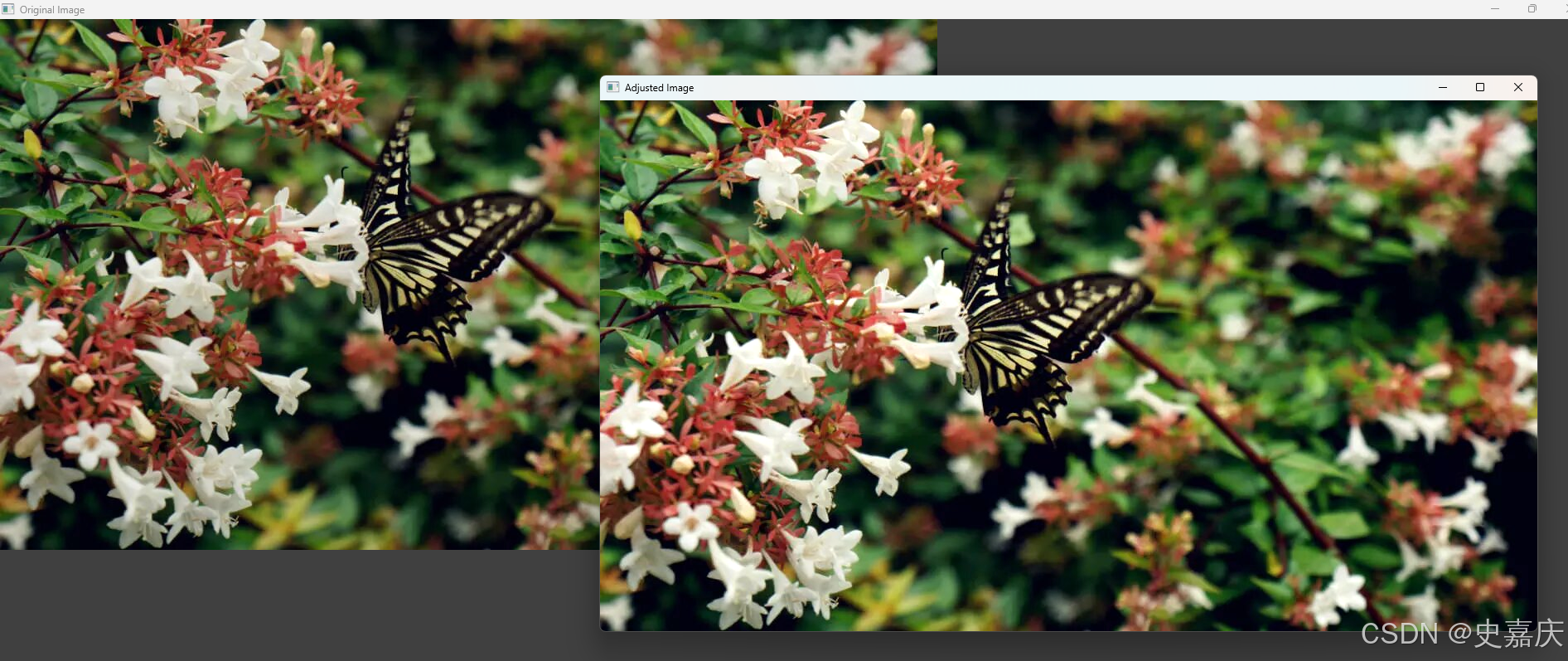
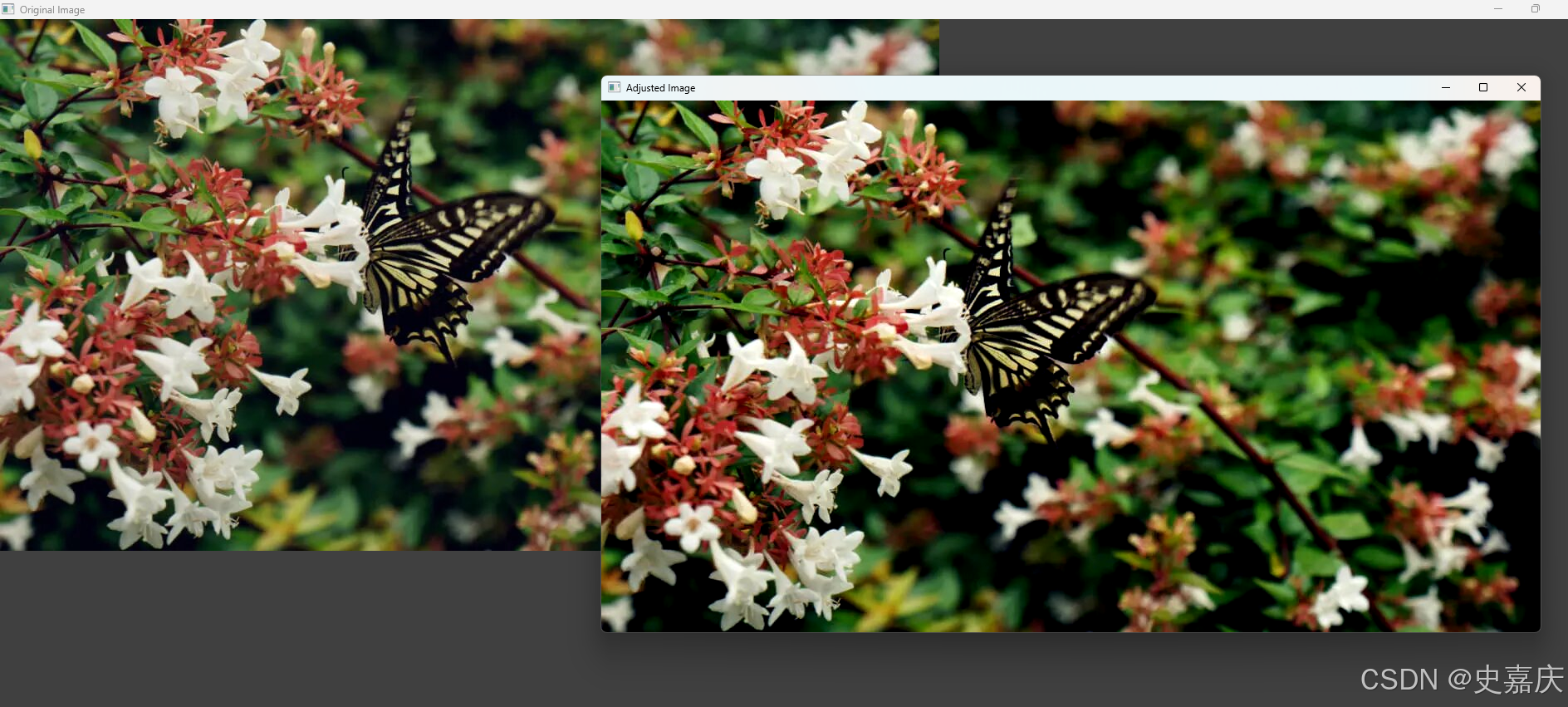
# 亮度调整 Brightness Adjustmentdef adjust_brightness_randomly(image, alpha_range=(0.5, 1.5)):# 生成一个随机亮度调整因子alpha = random.uniform(alpha_range[0], alpha_range[1])# 亮度调整adjusted_image = cv2.convertScaleAbs(image, alpha=alpha, beta=0)return adjusted_image# 随机调整亮度
adjusted_image = adjust_brightness_randomly(image)# 显示或保存调整后的图像
cv2.imshow('Original Image', image)
cv2.imshow('Adjusted Image', adjusted_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 对比度调整 Contrast Adjustmentdef random_contrast(image, contrast_range=[0.5, 1.5]):# 获取图像的维度h, w, _ = image.shape# 随机选择对比度系数contrast_factor = np.random.uniform(contrast_range[0], contrast_range[1])# 创建一个空的浮点型图像来存储调整后的图像adjusted_image = np.zeros((h, w, 3), dtype=np.float32)# 对图像进行对比度调整for i in range(h):for j in range(w):# 将像素值归一化到0-1之间pixel = image[i, j] / 255.0# 调整对比度adjusted_pixel = np.clip(contrast_factor * (pixel - 0.5) + 0.5, 0, 1)# 将像素值转换回0-255adjusted_image[i, j] = adjusted_pixel * 255# 将浮点数图像转换为无符号整数adjusted_image = np.uint8(adjusted_image)return adjusted_image# 随机调整图像的对比度
adjusted_image = random_contrast(image)# 显示原始图像和调整后的图像
cv2.imshow('Original Image', image)
cv2.imshow('Adjusted Image', adjusted_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
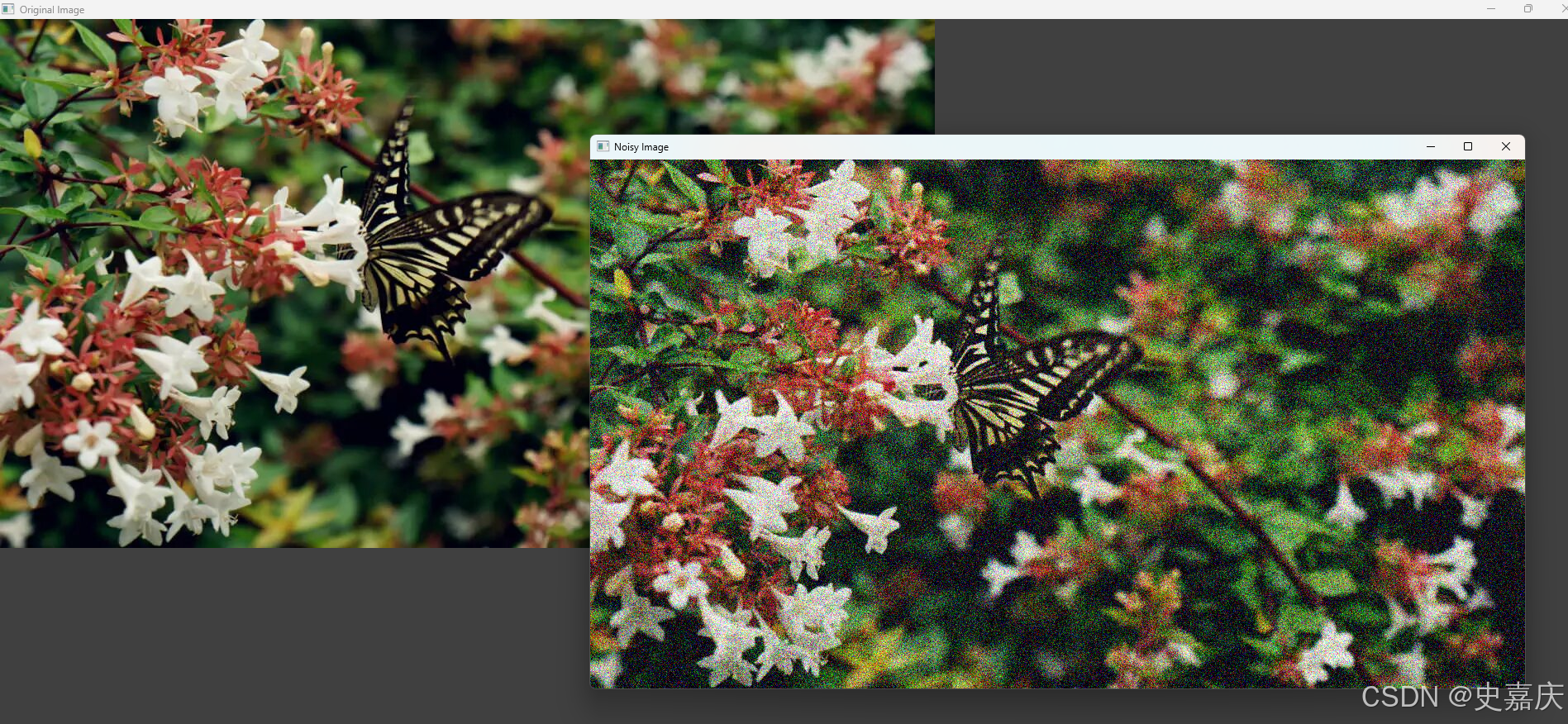
# 添加噪声 Adding Noise# 将图像数据转换为浮点型以支持噪声添加
image_N = image.astype(np.float32)# 定义高斯噪声的均值和标准差
mean = 0
stddev = 50.0 # 可以根据需要调整这个值来控制噪声的强度# 生成高斯噪声
noise = np.random.normal(mean, stddev, image_N.shape)# 将噪声添加到图像上
noisy_image = np.clip(image_N + noise, 0, 255).astype(np.uint8)# 显示或保存带噪声的图像
cv2.imshow('Original Image', image)
cv2.imshow('Noisy Image', noisy_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 颜色抖动 Color Jitteringdef random_color_shift(image, hue_shift_range=18, sat_shift_range=30, val_shift_range=40):# 将BGR图像转换为HSV图像hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)# 分解HSV图像的通道h, s, v = cv2.split(hsv)# 随机改变色调h = cv2.add(h, np.random.randint(-hue_shift_range, hue_shift_range+1))h = np.clip(h, 0, 179) # 确保色调值在0-179之间# 随机改变饱和度s = cv2.add(s, np.random.randint(-sat_shift_range, sat_shift_range+1))s = np.clip(s, 0, 255) # 确保饱和度值在0-255之间# 随机改变亮度v = cv2.add(v, np.random.randint(-val_shift_range, val_shift_range+1))v = np.clip(v, 0, 255) # 确保亮度值在0-255之间# 合并HSV通道hsv_shifted = cv2.merge((h, s, v))# 将HSV图像转换回BGR图像image_shifted = cv2.cvtColor(hsv_shifted, cv2.COLOR_HSV2BGR)return image_shifted# 随机改变颜色属性
shifted_image = random_color_shift(image)# 显示或保存图像
cv2.imshow('Original Image', image)
cv2.imshow('Shifted Image', shifted_image)
cv2.waitKey(0)
cv2.destroyAllWindows()

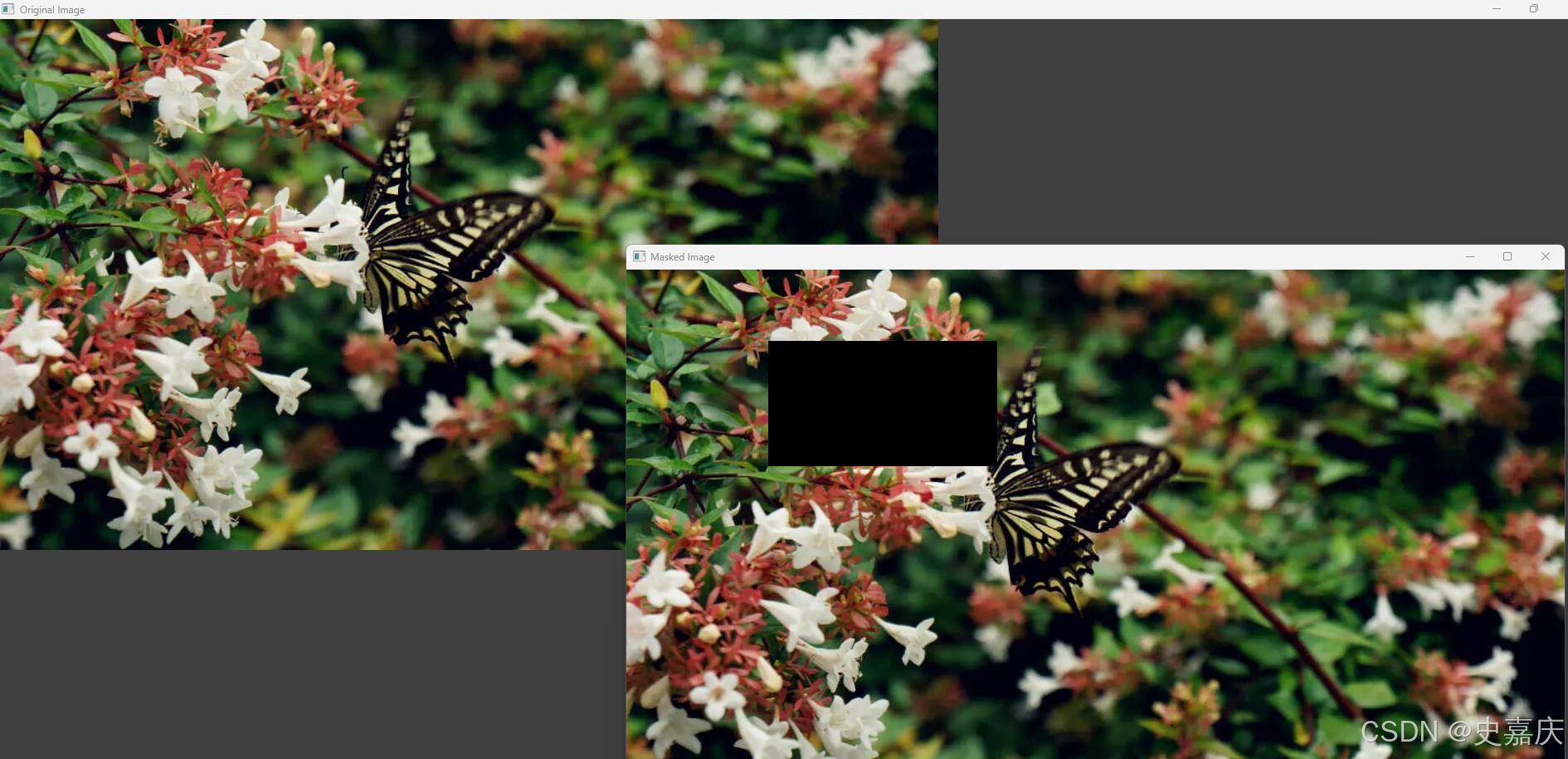
# 随即擦除 Random Erasingdef random_mask_image(image, min_mask_area=0.05, max_mask_area=0.2):image_c = image.copy()height, width = image_c.shape[:2]# 确定要遮挡的面积(基于图像尺寸的百分比)min_mask_width_height = int(min(width, height) * np.sqrt(min_mask_area))max_mask_width_height = int(min(width, height) * np.sqrt(max_mask_area))# 随机选择遮挡区域的左上角坐标和大小start_x = random.randint(0, width - max_mask_width_height)start_y = random.randint(0, height - max_mask_width_height)mask_width = random.randint(min_mask_width_height, max_mask_width_height)mask_height = random.randint(min_mask_width_height, max_mask_width_height)# 在图像上绘制遮挡矩形image_c[start_y:start_y+mask_height, start_x:start_x+mask_width, :] = 0 # 使用黑色(RGB值为0,0,0)进行遮挡return image_c# 使用示例
masked_image = random_mask_image(image)cv2.imshow('Original Image', image)
cv2.imshow('Masked Image', masked_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
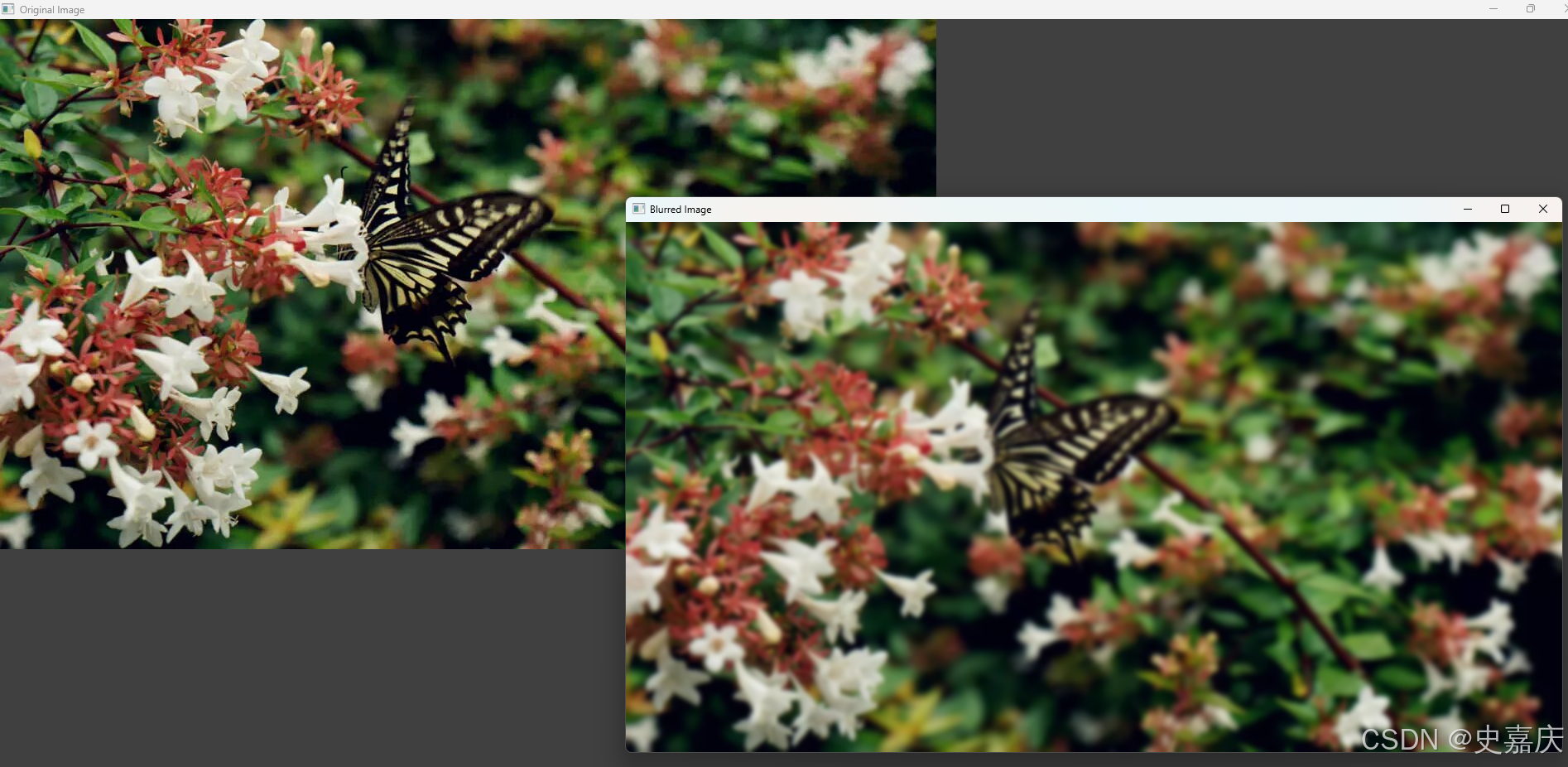
# 随机高斯模糊 Random Gaussian Blur# 应用高斯模糊
blurred_image = cv2.GaussianBlur(image, (15, 15), 0)# 显示模糊后的图像
cv2.imshow('Original Image', image)
cv2.imshow('Blurred Image', blurred_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
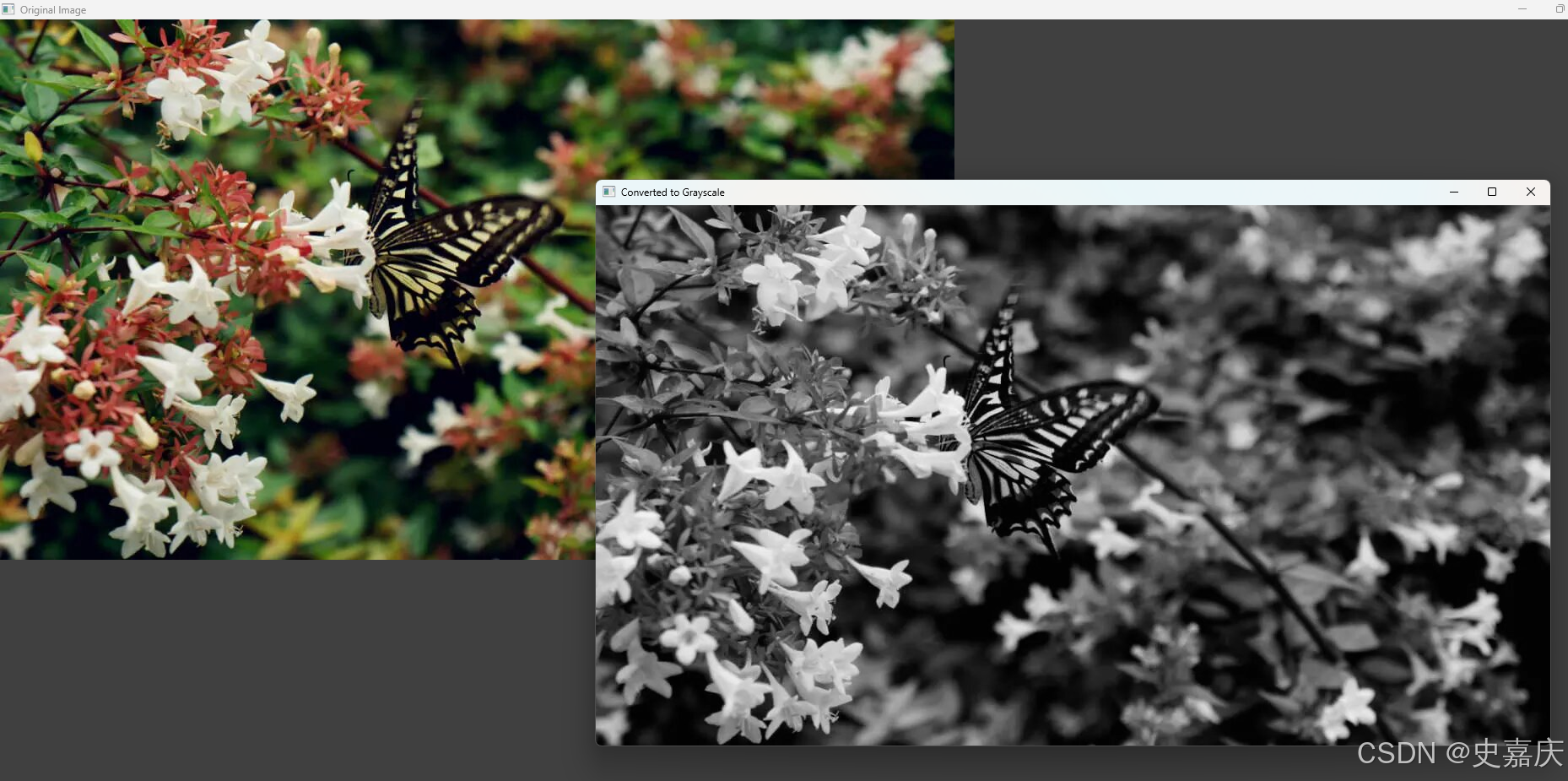
# 随机灰度 Random Grayscale# 随机决定是否将图像转换为灰度图
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)# 等待用户按任意键后关闭所有窗口
cv2.imshow('Converted to Grayscale', gray_image)
cv2.imshow('Original Image', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
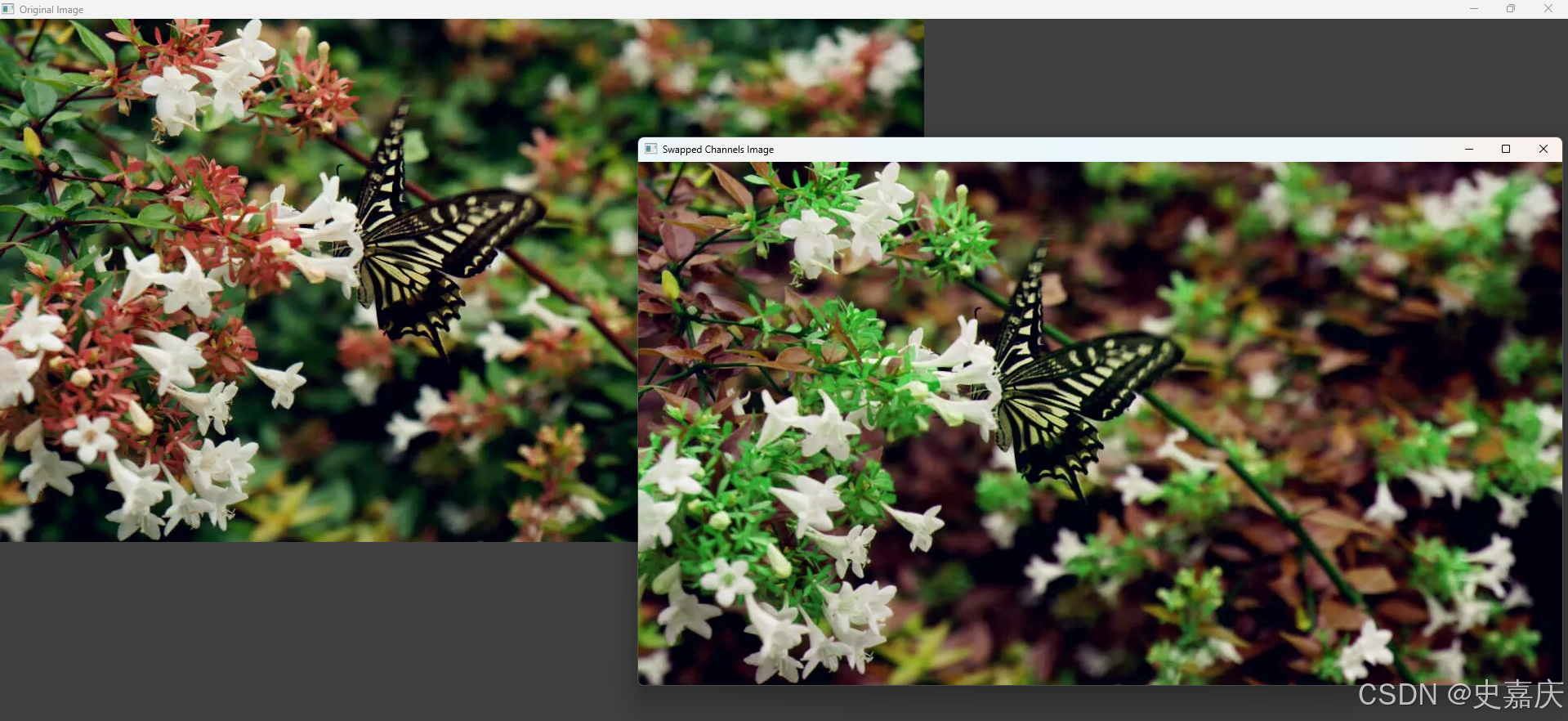
# 随机通道交换 Random Channel Swap# 随机生成一个颜色通道交换的顺序
channels = [0, 1, 2]
random.shuffle(channels)# 使用numpy的高级索引来重排颜色通道
swapped_image = image[:, :, channels]# 显示原图和颜色通道交换后的图像
cv2.imshow('Original Image', image)
cv2.imshow('Swapped Channels Image', swapped_image)# 等待用户按任意键后关闭所有窗口
cv2.waitKey(0)
cv2.destroyAllWindows()
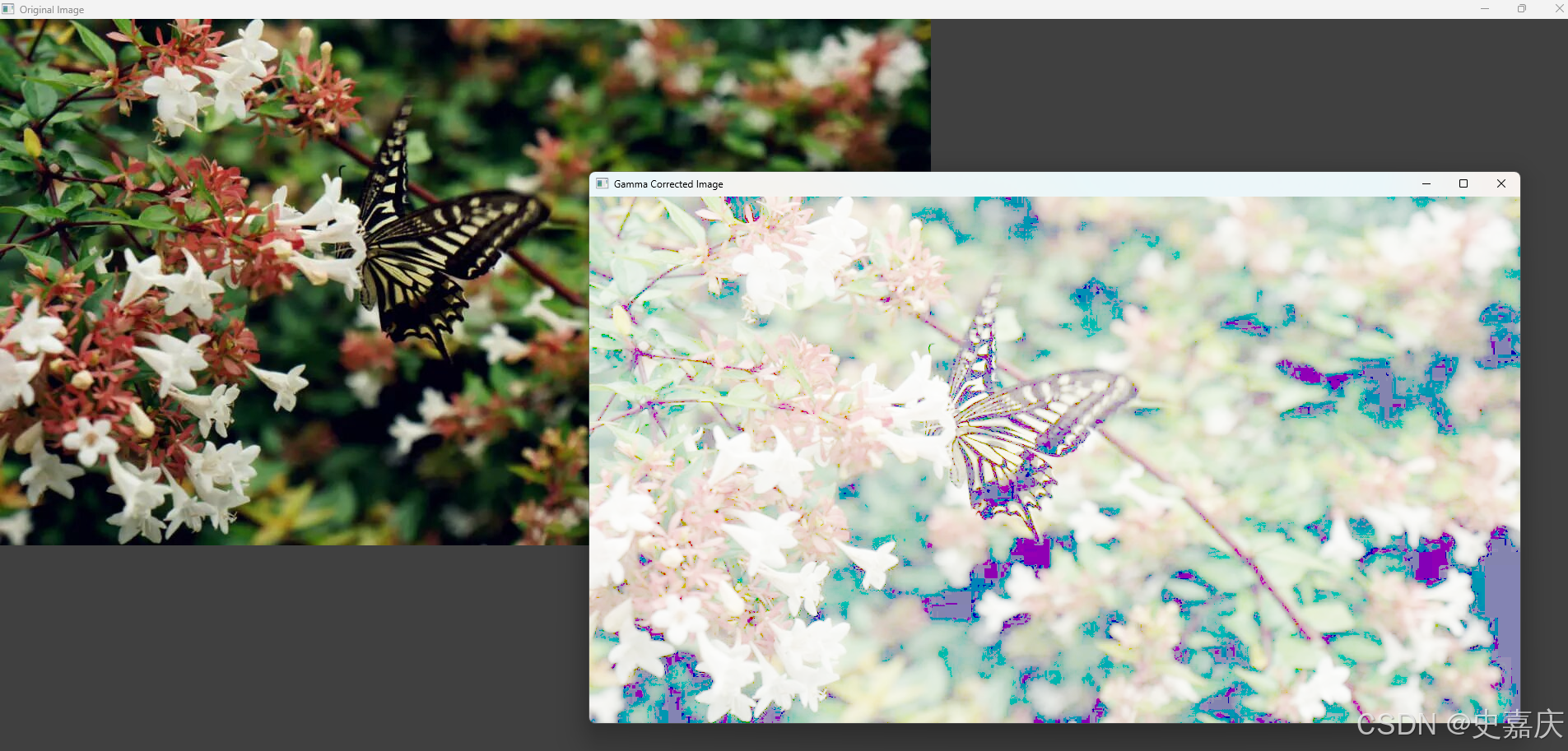
# 随机伽马校正 Random Gamma Correctiondef adjust_gamma(image, gamma=1.0):# 构建一个查找表映射每个像素值inv_gamma = 1.0 / gammatable = np.array([((i / 255.0) ** inv_gamma) * 255for i in np.arange(0, 256)]).astype("uint8")# 使用查找表应用伽马校正return cv2.LUT(image, table)# 随机生成一个伽马值(范围可以根据需要调整)
gamma = random.uniform(0.5, 12.0)# 应用伽马校正
gamma_corrected_image = adjust_gamma(image, gamma)# 显示原图和伽马校正后的图像
cv2.imshow('Original Image', image)
cv2.imshow('Gamma Corrected Image', gamma_corrected_image)# 等待用户按任意键后关闭所有窗口
cv2.waitKey(0)
cv2.destroyAllWindows()
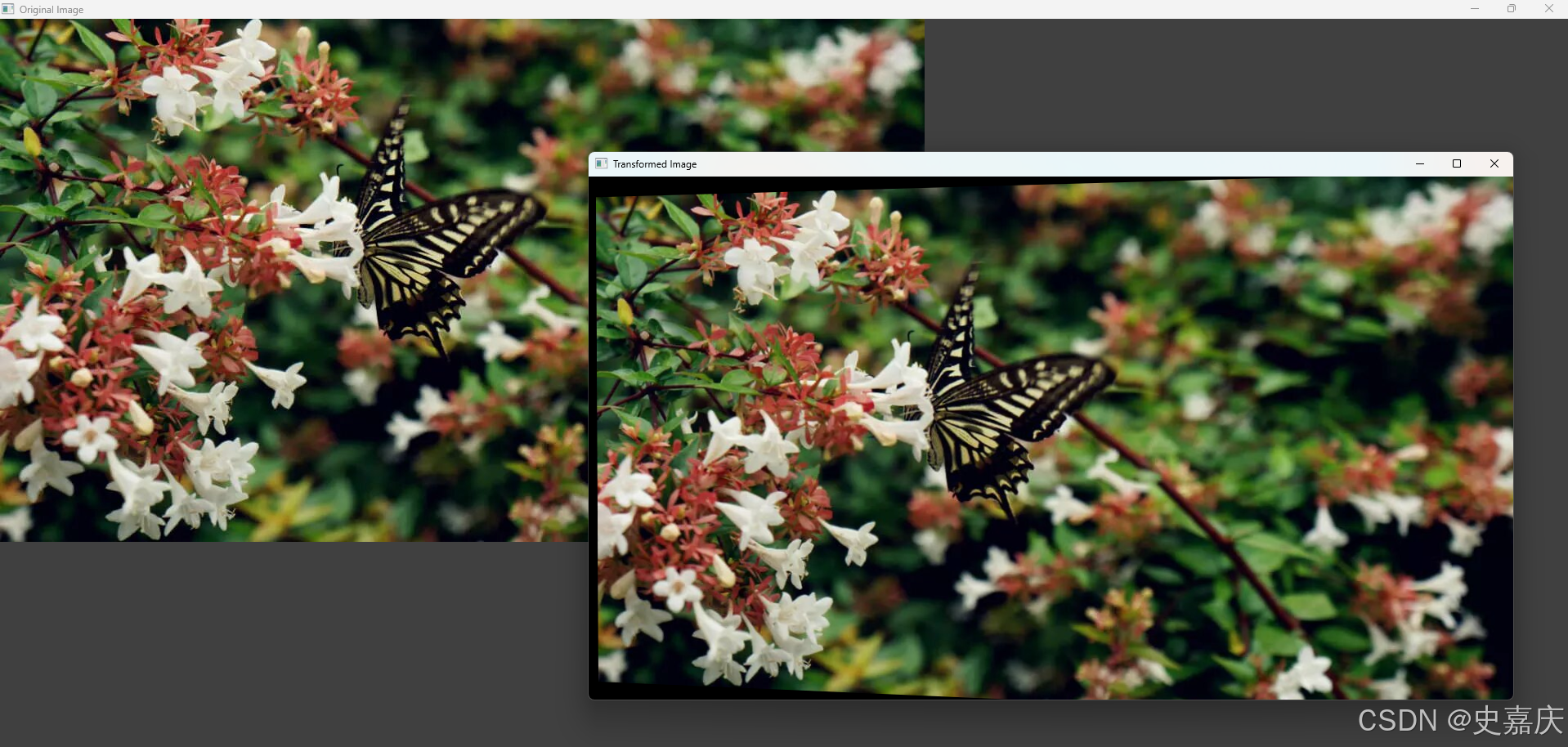
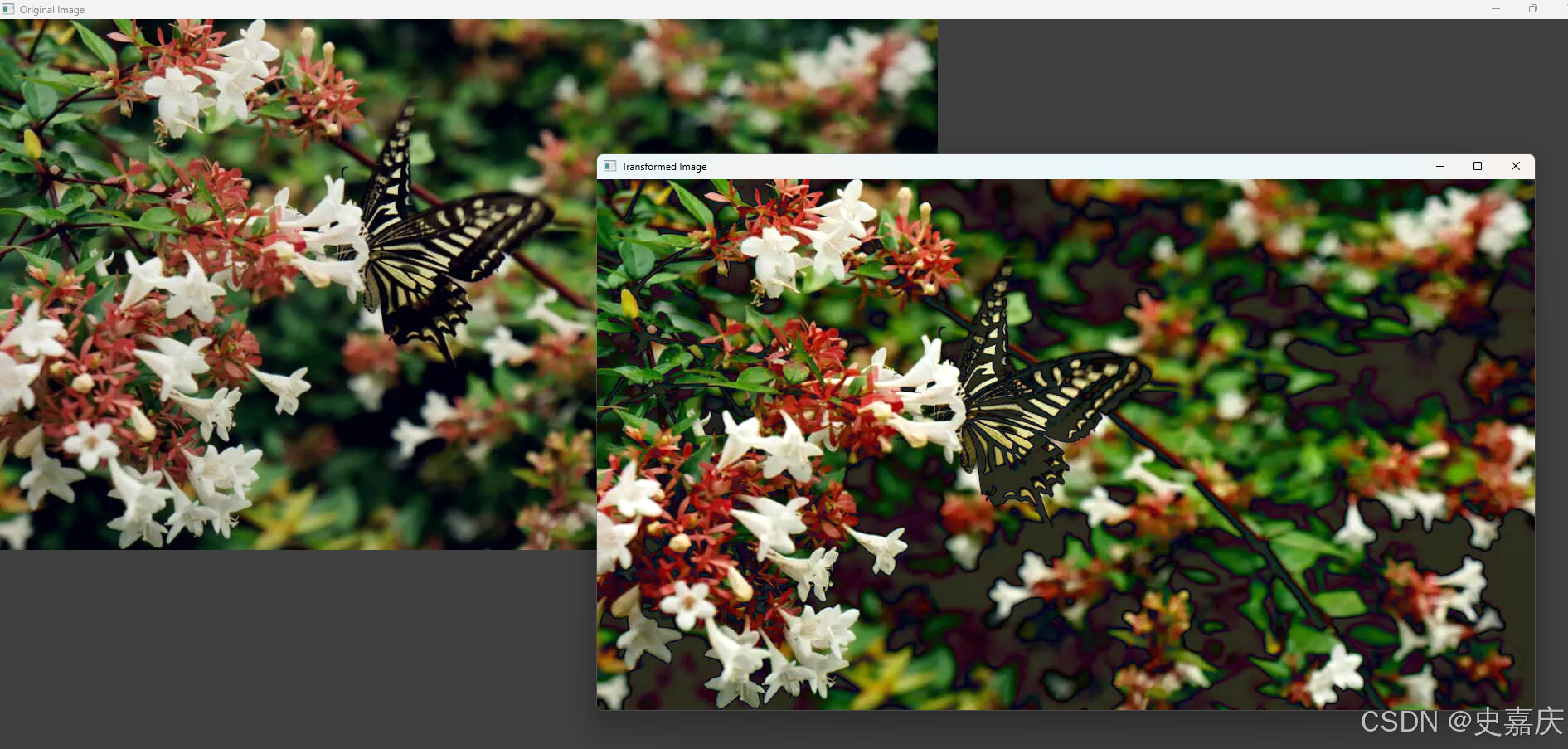
# 随机透视变换 Random Perspective Transformdef random_perspective_transform(image):# 获取图像尺寸height, width = image.shape[:2]# 定义原始图像的四个顶点src_points = np.float32([[0, 0], [width, 0], [width, height], [0, height]])# 定义目标图像的四个顶点并添加随机偏移dst_points = src_points + np.float32([[random.uniform(-30, 30), random.uniform(-30, 30)],[random.uniform(-30, 30), random.uniform(-30, 30)],[random.uniform(-30, 30), random.uniform(-30, 30)],[random.uniform(-30, 30), random.uniform(-30, 30)]])# 计算透视变换矩阵matrix = cv2.getPerspectiveTransform(src_points, dst_points)# 应用透视变换transformed_image = cv2.warpPerspective(image, matrix, (width, height))return transformed_image# 应用随机透视变换
transformed_image = random_perspective_transform(image)# 显示原图和透视变换后的图像
cv2.imshow('Original Image', image)
cv2.imshow('Transformed Image', transformed_image)# 等待用户按任意键后关闭所有窗口
cv2.waitKey(0)
cv2.destroyAllWindows()
# 随机光照变化 Random Brightness Adjustmentdef random_brightness_contrast(image):# 随机调整亮度brightness = random.randint(-50, 50)# 随机调整对比度contrast = random.uniform(0.5, 1.5)# 调整图像亮度和对比度new_image = cv2.convertScaleAbs(image, alpha=contrast, beta=brightness)return new_image# 应用随机光照变化
transformed_image = random_brightness_contrast(image)# 显示原图和光照变化后的图像
cv2.imshow('Original Image', image)
cv2.imshow('Transformed Image', transformed_image)# 等待用户按任意键后关闭所有窗口
cv2.waitKey(0)
cv2.destroyAllWindows()
# 直方图均衡import cv2
import numpy as npimg = cv2.imread('buttefly.jpeg', 0)
equ = cv2.equalizeHist(img)
cv2.imwrite('equalized_image.jpg', equ)
# true
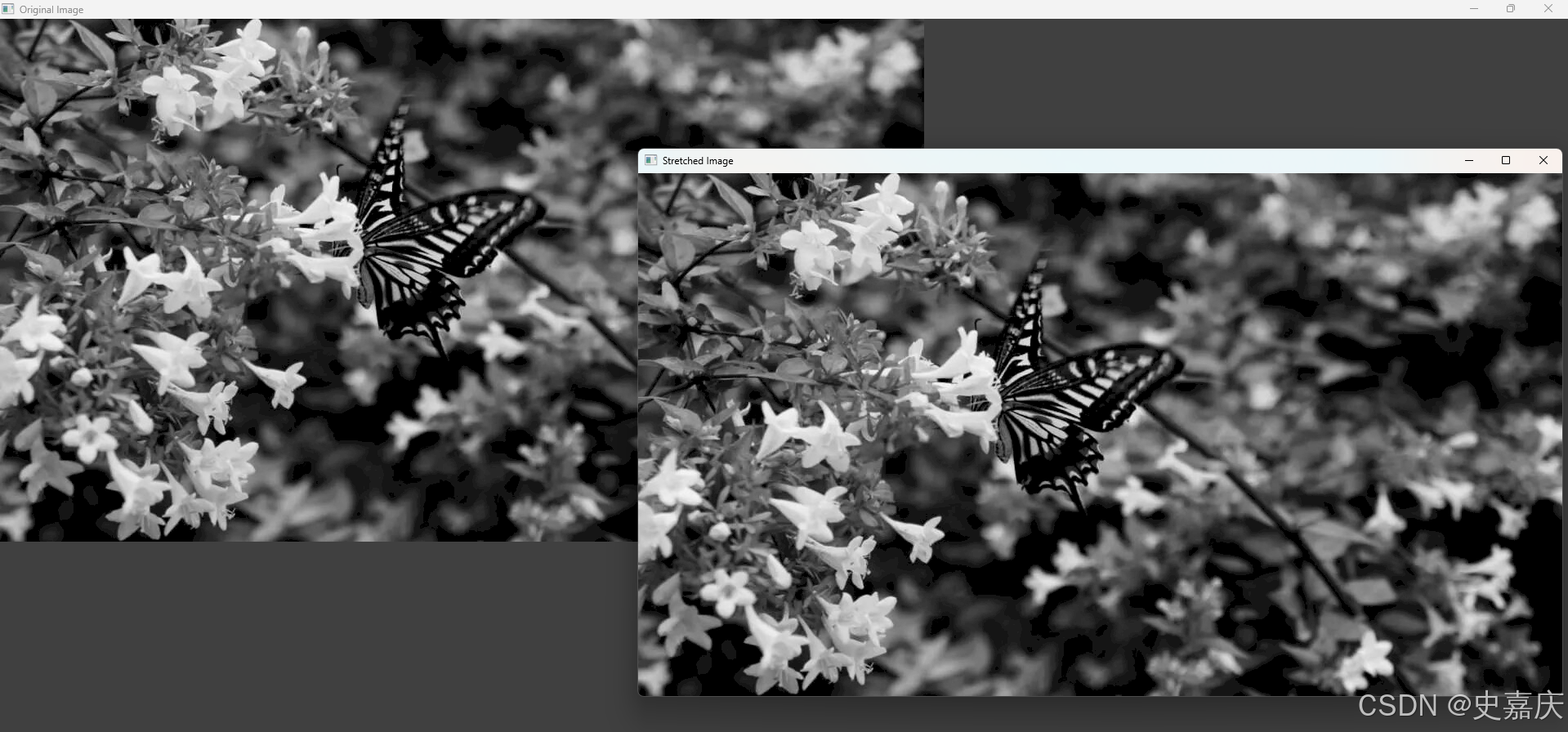
# 对比度拉伸def contrast_stretching(image):# 获取图像的最小值和最大值min_val = np.min(image)max_val = np.max(image)print(f"Min value: {min_val}, Max value: {max_val}")# Min value: 0, Max value: 252# 防止除以零的情况if min_val == max_val:return image# 应用线性变换,将像素值拉伸到0-255范围stretched_image = (image - min_val) * (255 / (max_val - min_val))stretched_image = np.clip(stretched_image, 0, 255) # 确保值在0-255范围内stretched_image = np.uint8(stretched_image)return stretched_image# 读取图像
image = cv2.imread('buttefly.jpeg', cv2.IMREAD_GRAYSCALE) # 读取灰度图像# 检查图像是否成功读取
if image is None:print("Error: Image not found or unable to open.")
else:# 应用对比度拉伸stretched_image = contrast_stretching(image)# 显示原图和对比度拉伸后的图像cv2.imshow('Original Image', image)cv2.imshow('Stretched Image', stretched_image)# 等待用户按任意键后关闭所有窗口cv2.waitKey(0)cv2.destroyAllWindows()
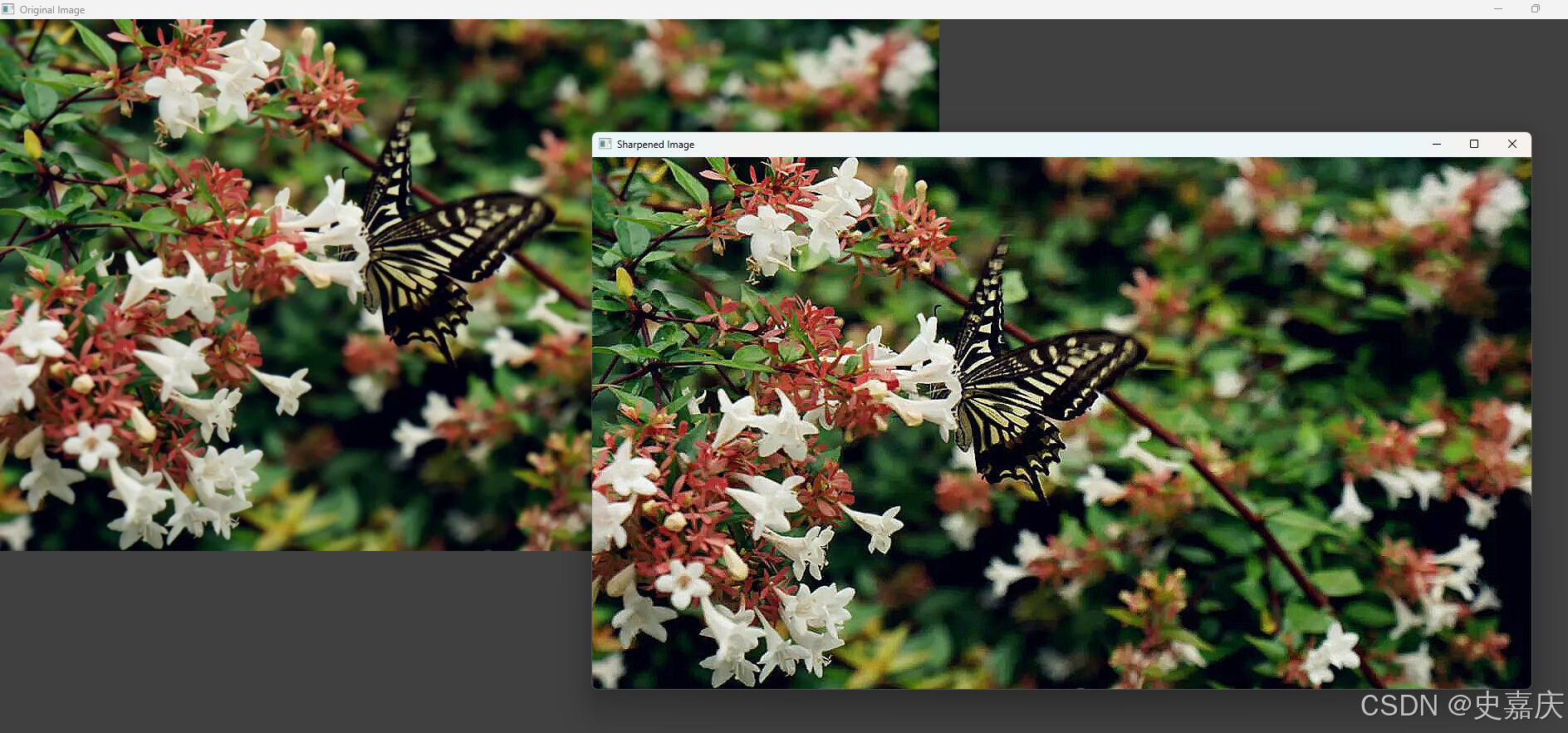
# 锐化def sharpen_image(image):# 定义一个锐化卷积核kernel = np.array([[0, -1, 0],[-1, 5,-1],[0, -1, 0]])# 应用卷积核进行图像锐化sharpened_image = cv2.filter2D(image, -1, kernel)return sharpened_image# 读取图像
image = cv2.imread('buttefly.jpeg')# 检查图像是否成功读取
if image is None:print("Error: Image not found or unable to open.")
else:# 应用锐化sharpened_image = sharpen_image(image)# 显示原图和锐化后的图像cv2.imshow('Original Image', image)cv2.imshow('Sharpened Image', sharpened_image)# 等待用户按任意键后关闭所有窗口cv2.waitKey(0)cv2.destroyAllWindows()
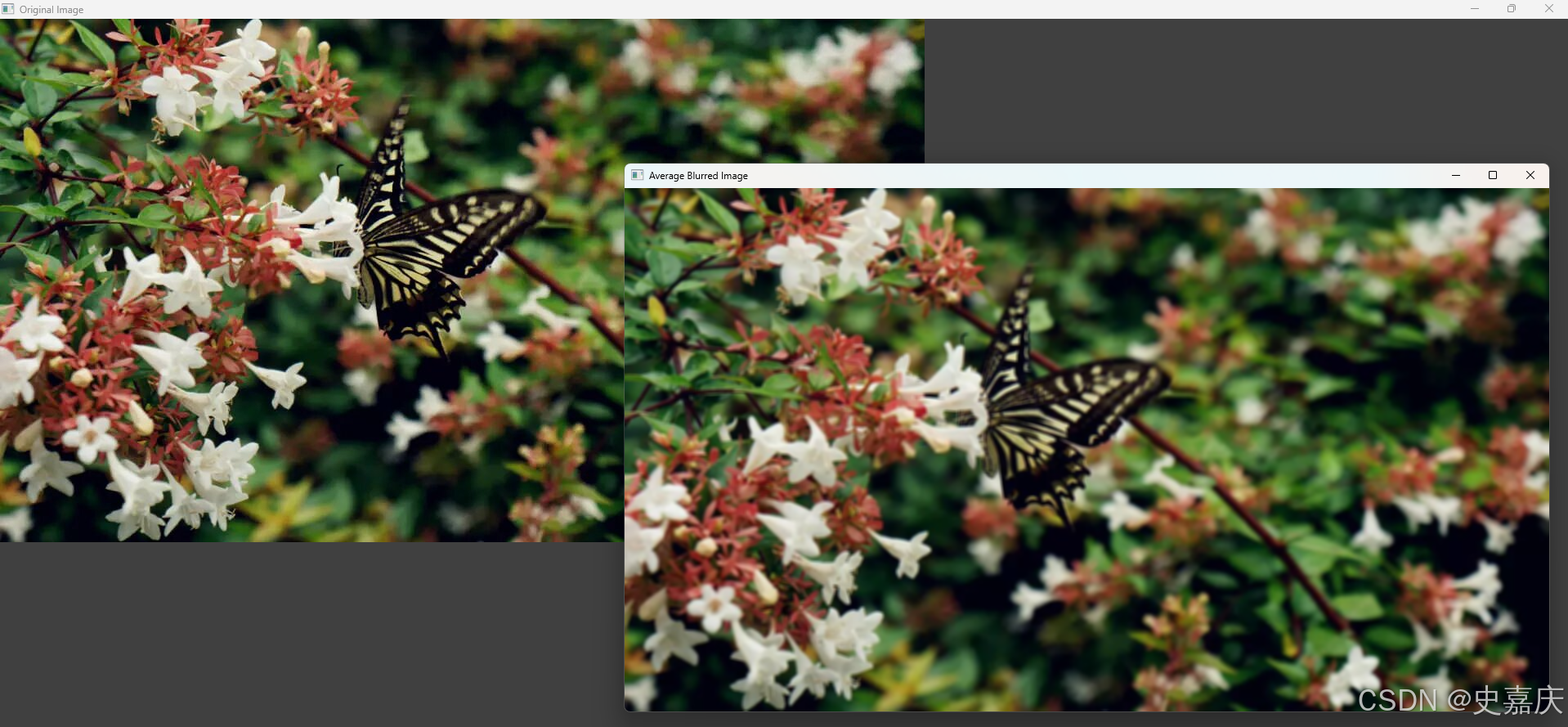
# 均值滤波def average_blur(image, ksize=5):blurred_image = cv2.blur(image, (ksize, ksize))return blurred_image# 读取图像
image = cv2.imread('buttefly.jpeg')# 检查图像是否成功读取
if image is None:print("Error: Image not found or unable to open.")
else:# 应用均值滤波blurred_image = average_blur(image)# 显示原图和去噪后的图像cv2.imshow('Original Image', image)cv2.imshow('Average Blurred Image', blurred_image)# 等待用户按任意键后关闭所有窗口cv2.waitKey(0)cv2.destroyAllWindows()
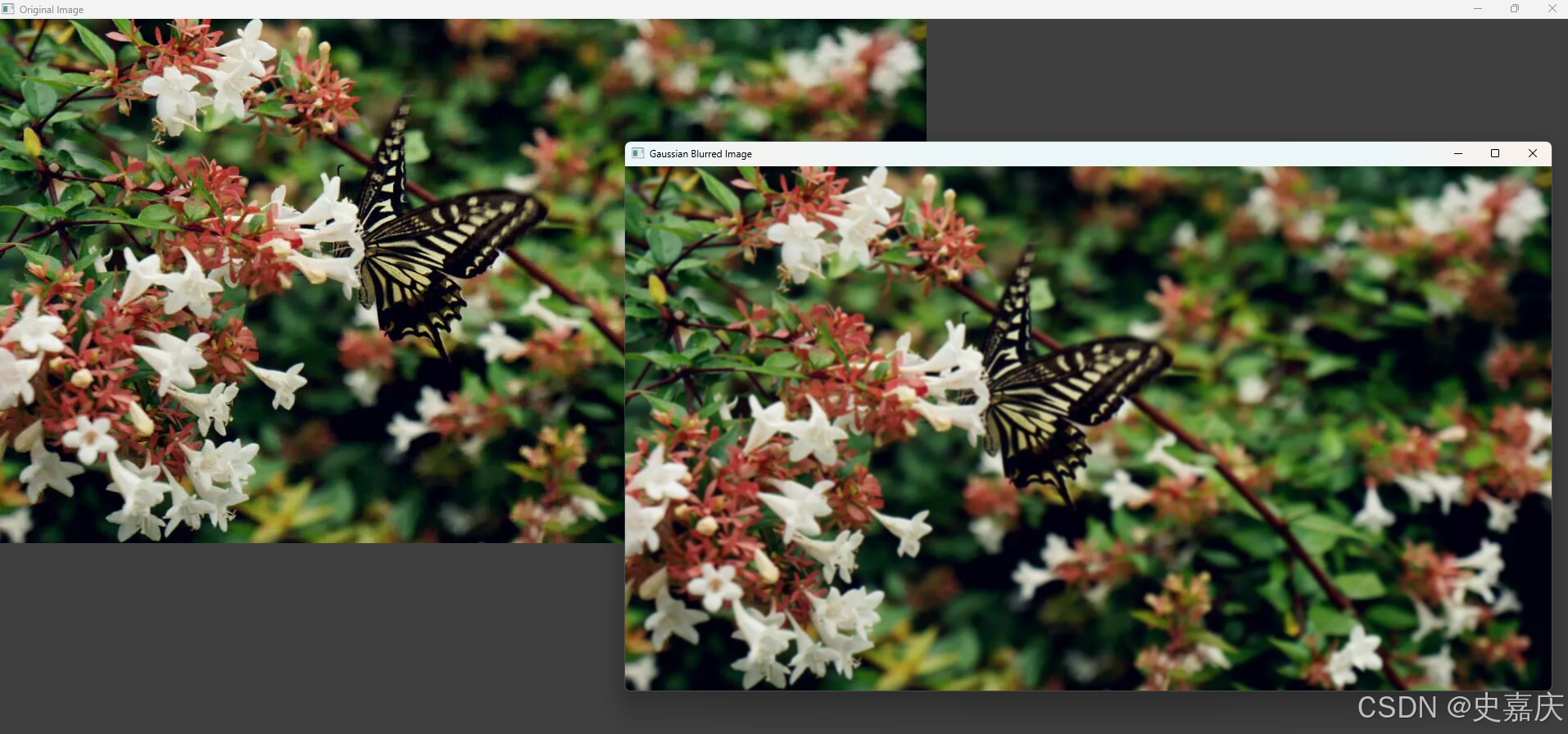
# 高斯滤波def gaussian_blur(image, ksize=5):blurred_image = cv2.GaussianBlur(image, (ksize, ksize), 0)return blurred_image# 读取图像
image = cv2.imread('buttefly.jpeg')# 检查图像是否成功读取
if image is None:print("Error: Image not found or unable to open.")
else:# 应用高斯滤波blurred_image = gaussian_blur(image)# 显示原图和去噪后的图像cv2.imshow('Original Image', image)cv2.imshow('Gaussian Blurred Image', blurred_image)# 等待用户按任意键后关闭所有窗口cv2.waitKey(0)cv2.destroyAllWindows()
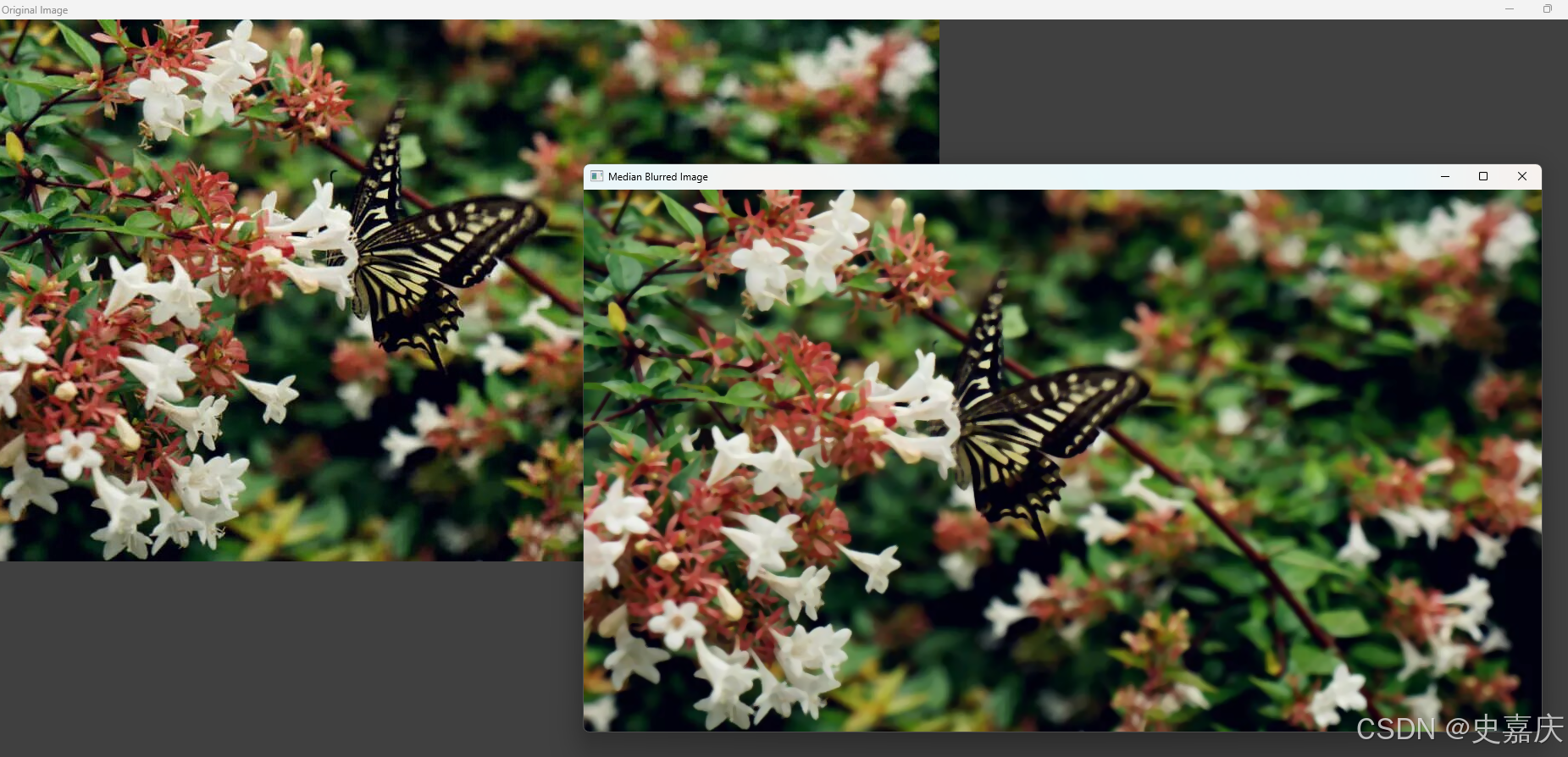
# 中值滤波def median_blur(image, ksize=5):blurred_image = cv2.medianBlur(image, ksize)return blurred_image# 读取图像
image = cv2.imread('buttefly.jpeg')# 检查图像是否成功读取
if image is None:print("Error: Image not found or unable to open.")
else:# 应用中值滤波blurred_image = median_blur(image)# 显示原图和去噪后的图像cv2.imshow('Original Image', image)cv2.imshow('Median Blurred Image', blurred_image)# 等待用户按任意键后关闭所有窗口cv2.waitKey(0)cv2.destroyAllWindows()
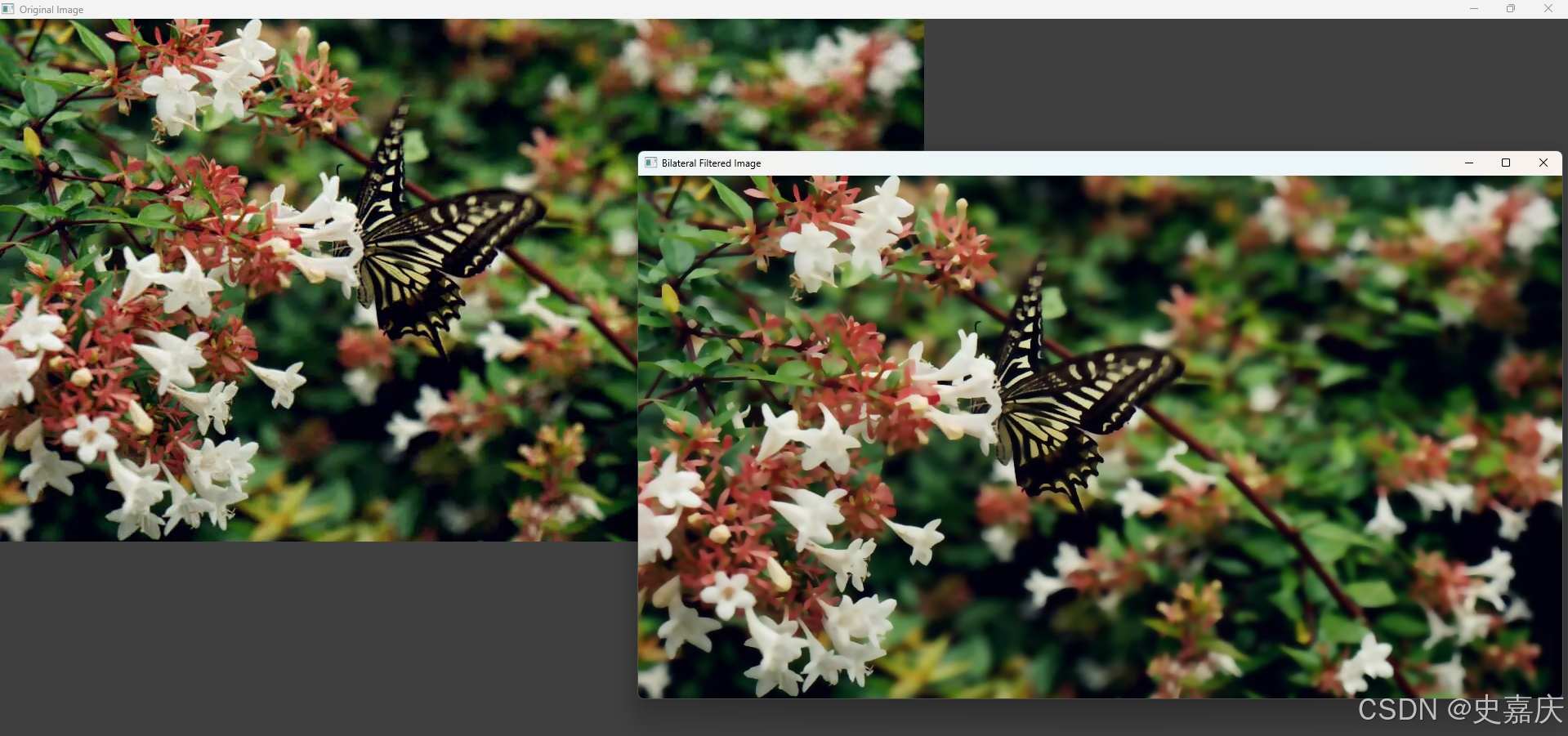
# 双边滤波def bilateral_filter(image, d=9, sigmaColor=75, sigmaSpace=75):blurred_image = cv2.bilateralFilter(image, d, sigmaColor, sigmaSpace)return blurred_image# 读取图像
image = cv2.imread('buttefly.jpeg')# 检查图像是否成功读取
if image is None:print("Error: Image not found or unable to open.")
else:# 应用双边滤波blurred_image = bilateral_filter(image)# 显示原图和去噪后的图像cv2.imshow('Original Image', image)cv2.imshow('Bilateral Filtered Image', blurred_image)# 等待用户按任意键后关闭所有窗口cv2.waitKey(0)cv2.destroyAllWindows()
结语
影像数据处理是计算机视觉任务的核心基石,其目标是通过系统化的方法提升数据质量、丰富数据多样性,并为模型训练与推理奠定坚实基础。