【原创】Ubuntu20.04 安装 Isaac Gym 仿真器
Isaac Gym 是 NVIDIA 开发的一个基于GPU的机器人仿真平台。其高效的 GPU 加速能力和大规模并行仿真性能,成为强化学习训练和机器人控制研究的重要选择。 本文将介绍 Isaac Gym 的安装过程【简易】。
1.配置环境
Ubuntu20.04 安装 NVIDIA 显卡驱动
Ubuntu20.04 安装 CUDA 12.1
Ubuntu20.04 安装 Conda环境
以上3步跳过~~~
2.安装Isaac Gym
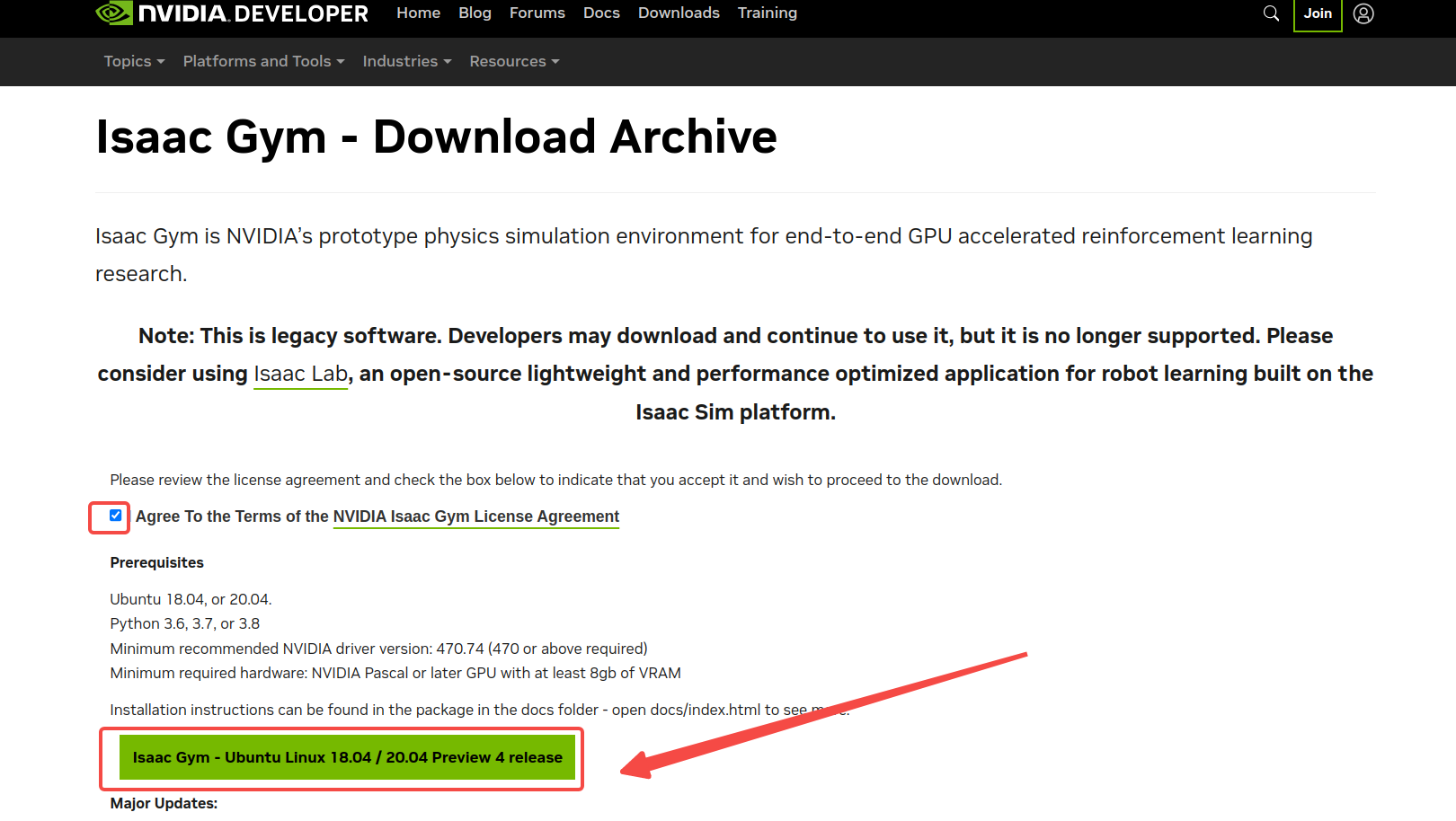
在https://developer.nvidia.com/isaac-gym/download网页下载安装文件IsaacGym_Preview_4_Package.tar.gz,下载后解压即可。
# 创建虚拟环境,环境名称可自定义
conda create -n isaac python=3.8
conda activate isaac# 安装Python包及相关依赖
cd isaacgym/python
pip install -e .
3.运行例程
运行例程验证安装效果
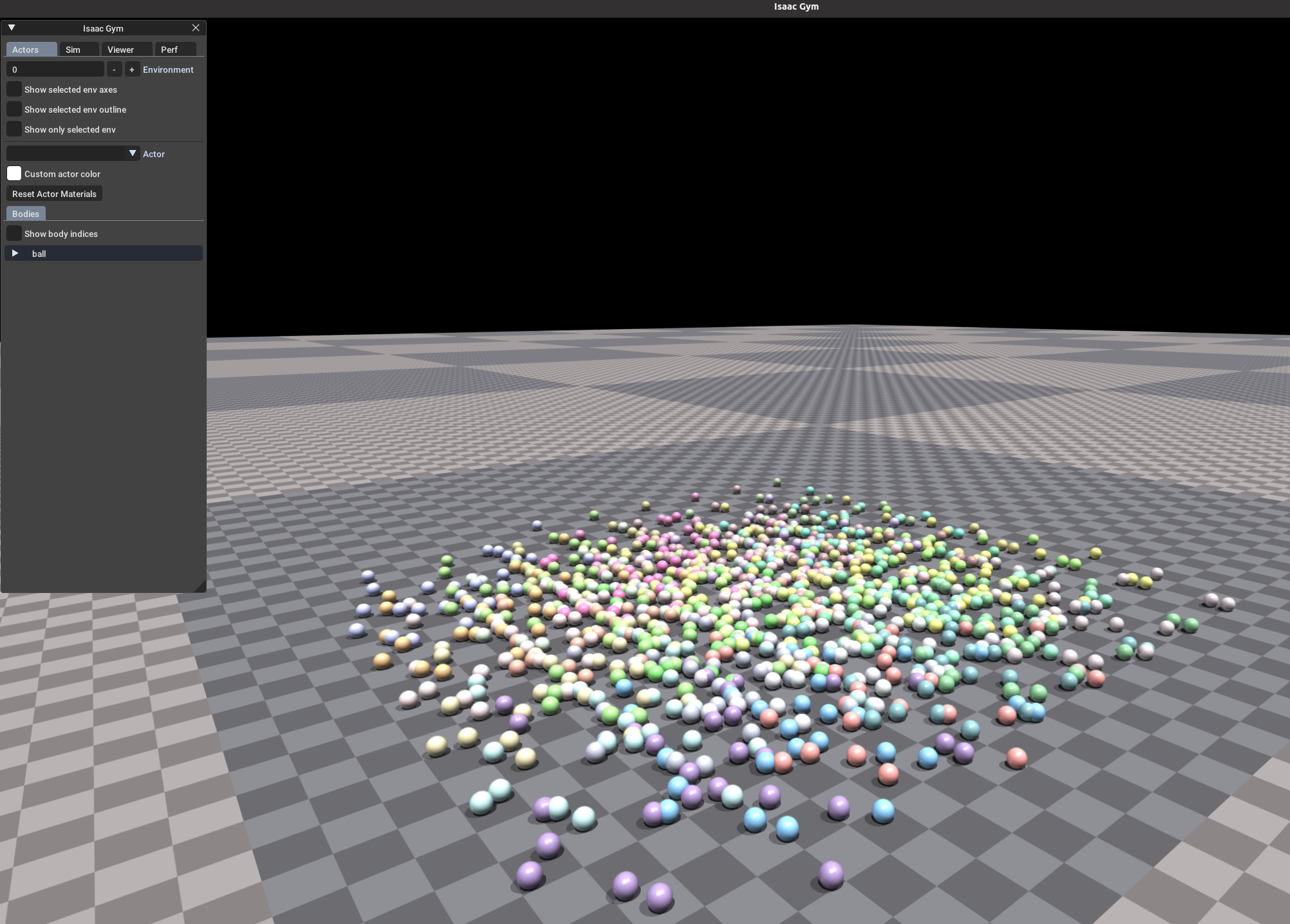
1.1080_balls_of_solitude
cd examples
python 1080_balls_of_solitude.py
2.joint_monkey
cd examples
python joint_monkey.py

如果运行无误,则说明安装成功!
参考:
Ubuntu20.04 安装 Isaac Gym (机器人仿真)_ubuntu安装issac gym-CSDN博客
Isaac Gym及范例环境安装_isaacgym安装-CSDN博客
Isaac Gym安装及使用教程-CSDN博客