关于Diamond机械手的运动学与动力学的推导
1.关于Diamond机械手
(1)位置模型推导
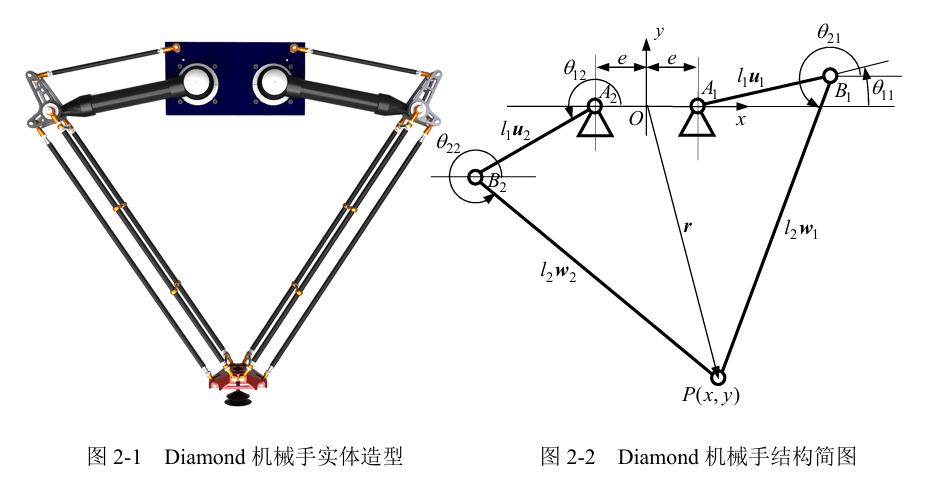
逆解:机械末端平台的位置与驱动关节之间的关系。
设p点在xy平面的坐标是(x,y)T,此时根据向量求解
OP等于向量r等于e向xy轴的向量+主动臂长度向xy轴的向量+从动长度向xy轴的向量。
即: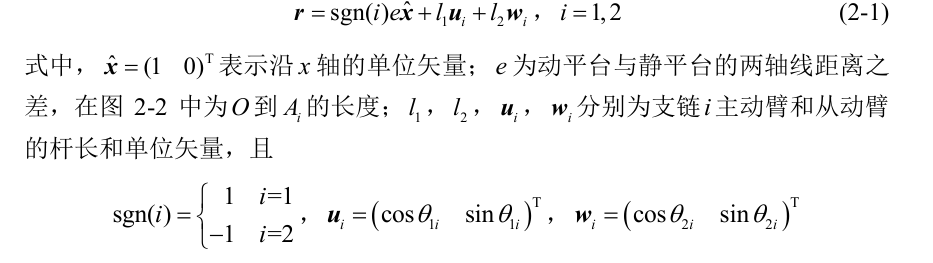
这里注意一点:因为分左右臂的所以在符号上有所区别,同时Theata2为什么是那么大,因为cos(theta)= -sin(270-theta),因为从动臂在向量运算上是负的,所以要注意一下符号。
求主动臂theta1的角度


所以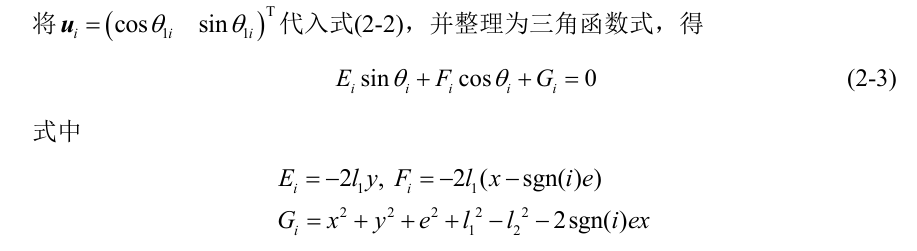
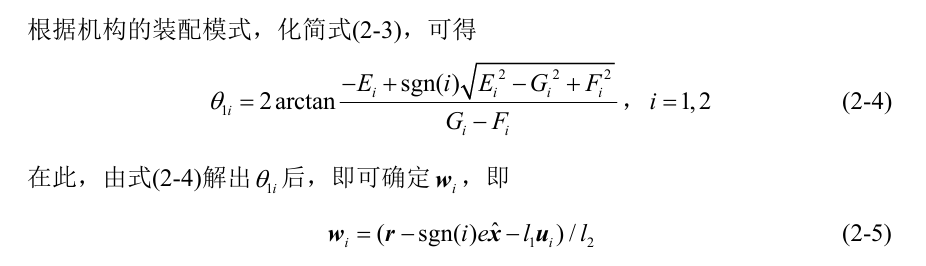
这此求出了机构的逆解,已知某段的xy坐标可以求出角度1和角度2的大小(2个角度1,2个角度2),既可以实现做基本的控制了。
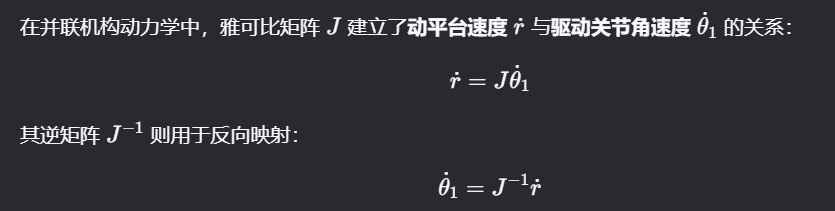
(2)速度模型推导
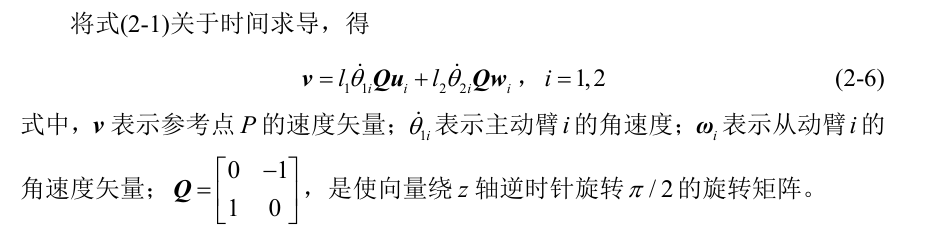
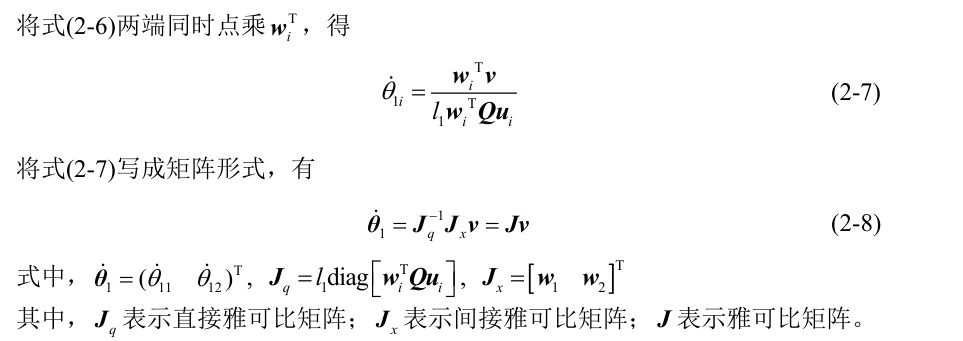
 奇异问题:简单的是直接和间接雅克比矩阵的秩为零的时候为奇异解。
奇异问题:简单的是直接和间接雅克比矩阵的秩为零的时候为奇异解。



从动臂的质心速度等于两段的速度除以2。 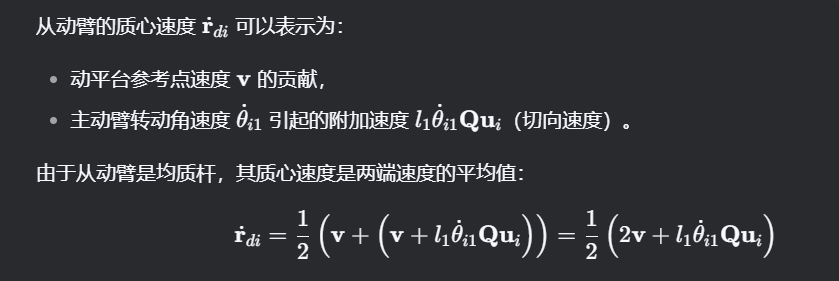
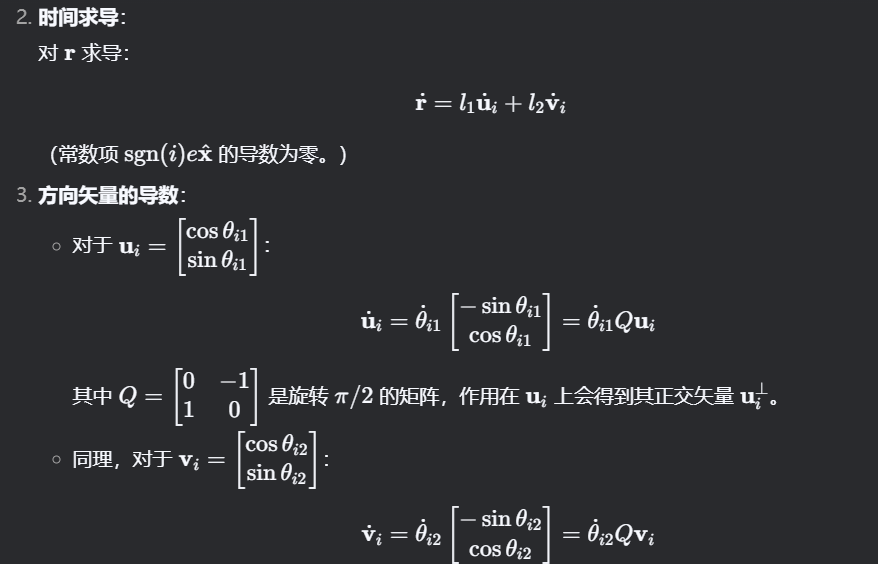
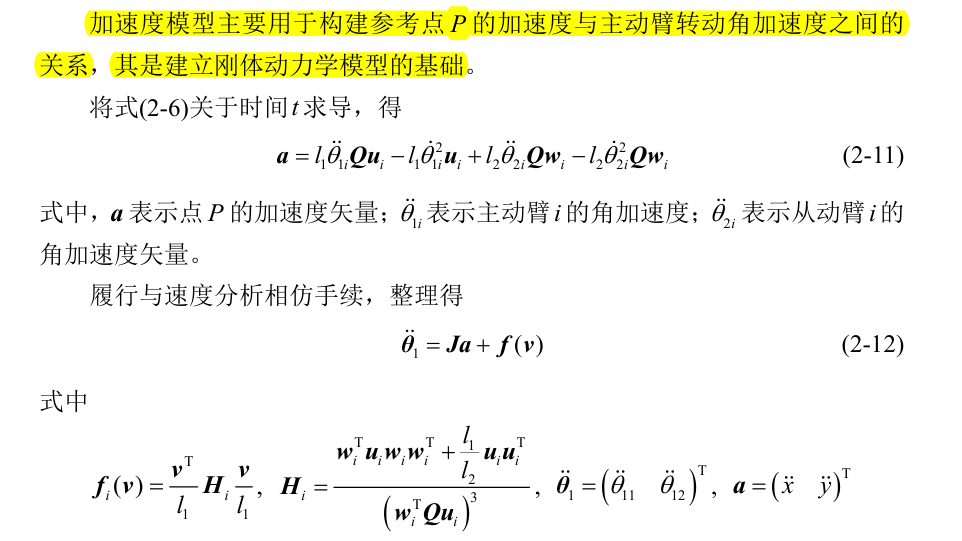
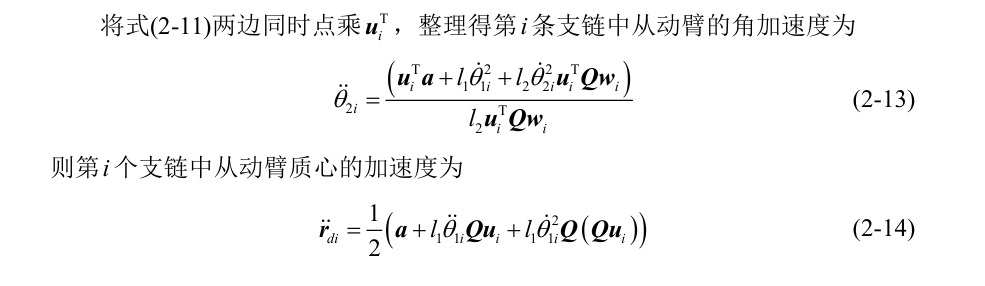
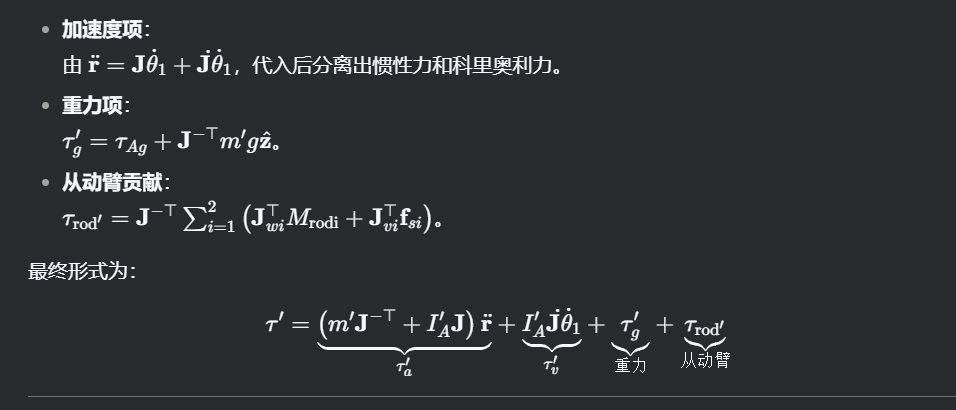
(3)加速度推导
加速度的推导和速度的推导方式一样。
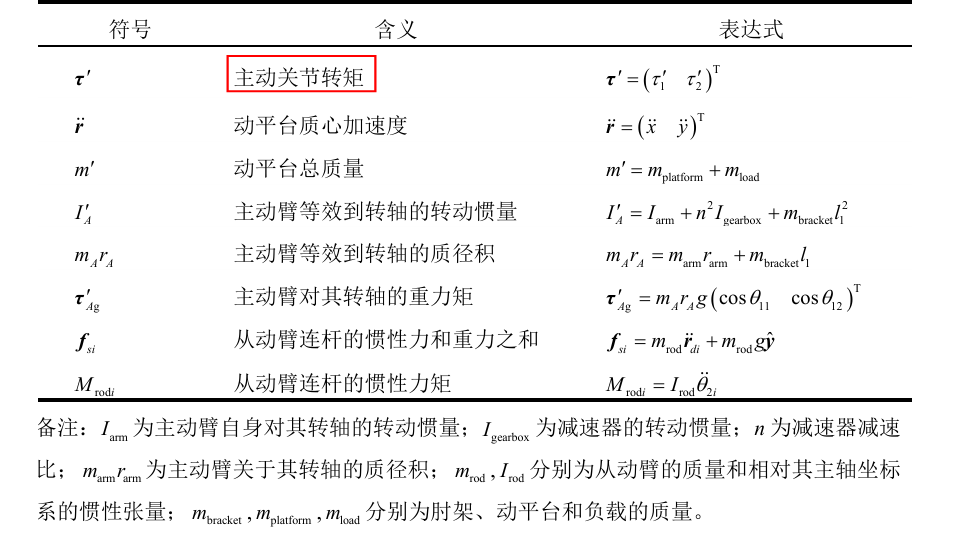
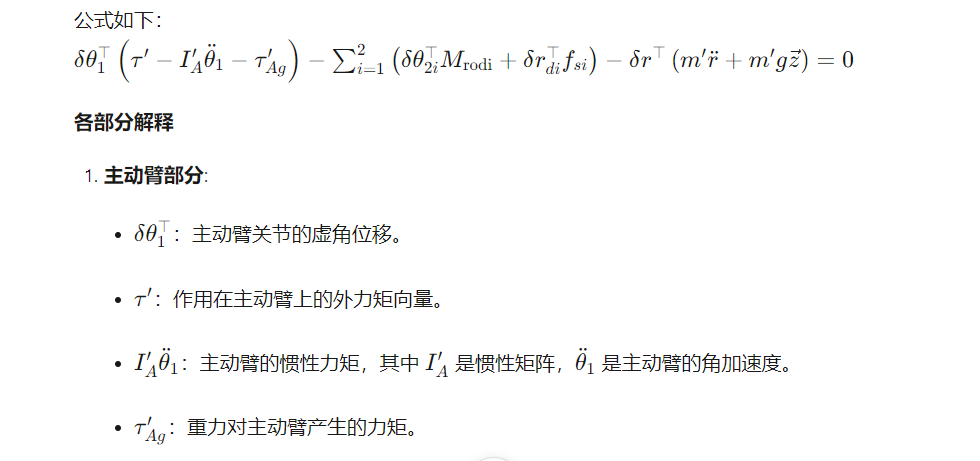
(4)刚体动力学

theta1是主动臂的虚位移,虚位移*电机力矩 - 虚位移*主动臂的转动惯量*主动臂转动的角加速度-虚位移*主动臂的动力矩 = 主动臂做的功
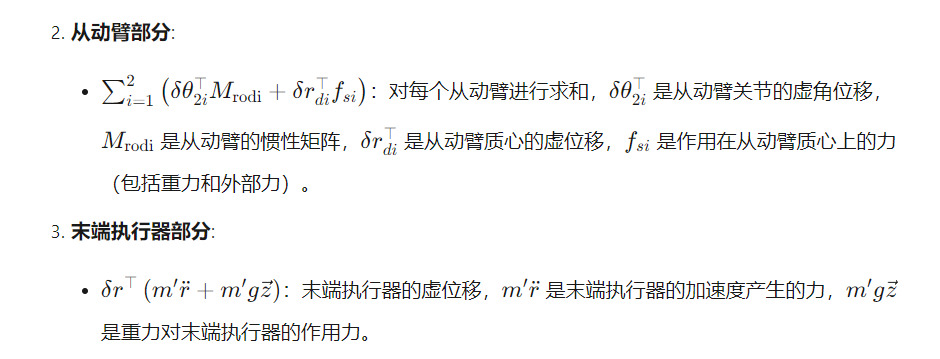
theta2是从动臂的虚位移,虚位移*从动臂的惯性力矩+从动臂的质心虚位移*从动臂的惯性力和重力之和。
动平台质心的虚位移*动平台的总质量*动平台的质加速度+动平台质心的虚位移*动平台的总质量*g
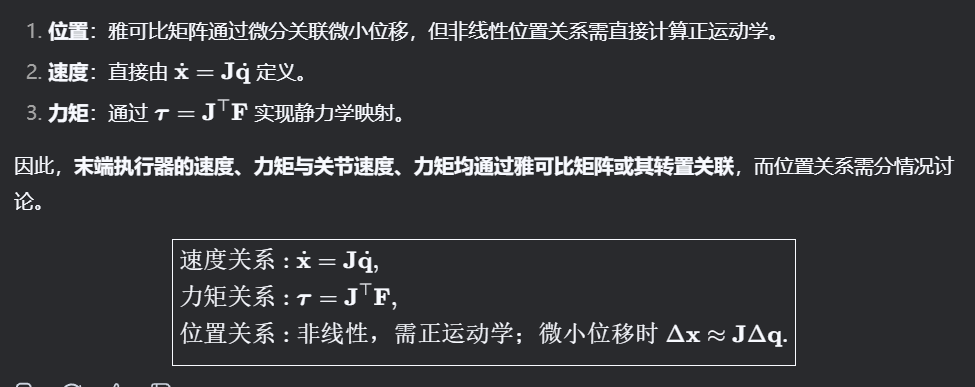
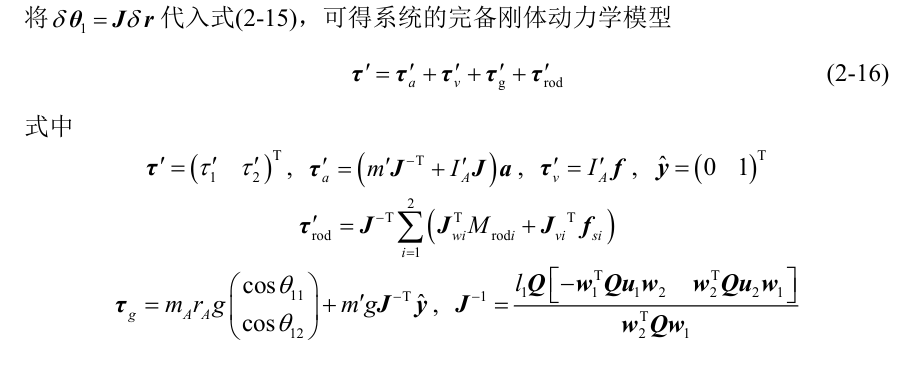
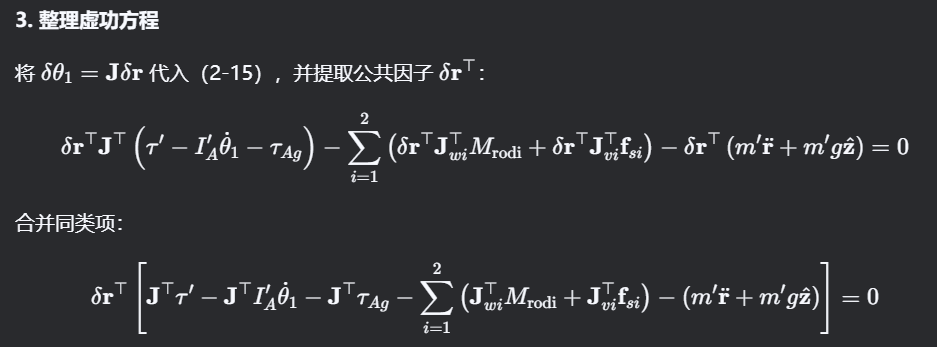
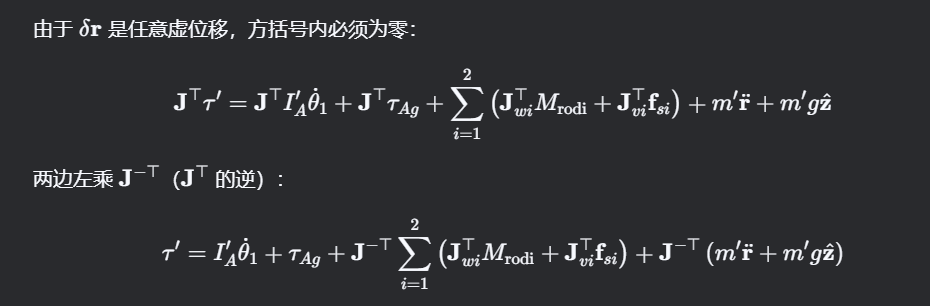
(5)简化动力学
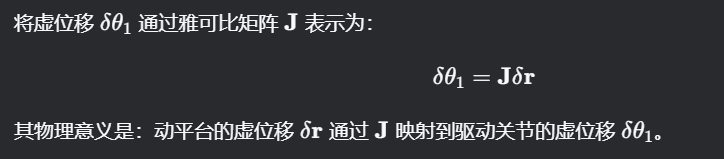
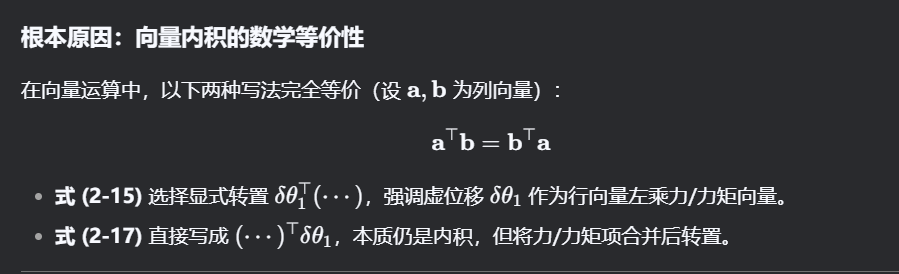
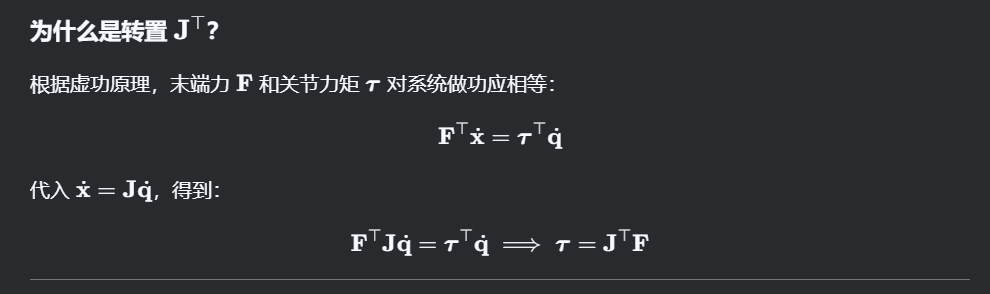
根据雅克比矩阵的定义,虚位移的定义可以知道
番外:
(1)
 (2)
(2)