视线估计的相关研究
什么是POG?
POG是每只眼睛在视网膜最高敏锐度的区域(中央凹陷区域)注视的点在图像中的呈现。
如何得到POG?
大多数远视视线估计都是从图片中提取眼睛特征分析,有时也会提取头部特征分析。常见一种方法通过跟踪面部特征来估计三维头部姿态,得出眼睛旋转中心的位置,然后结合估计的虹膜或瞳孔中心位置,计算POG;另一种方法是利用虹膜-巩膜边界的透视投影来估计眼睛在空间中的位置和方向,从而计算POG。
远视POG估计最常见的方法是使用瞳孔中心,以及一个或多个角膜反射进行估计。瞳孔中心和角膜反射已经在视线估计中用了40多年,但此前缺乏一般性理论,论文提出了POG估计的一般性理论。
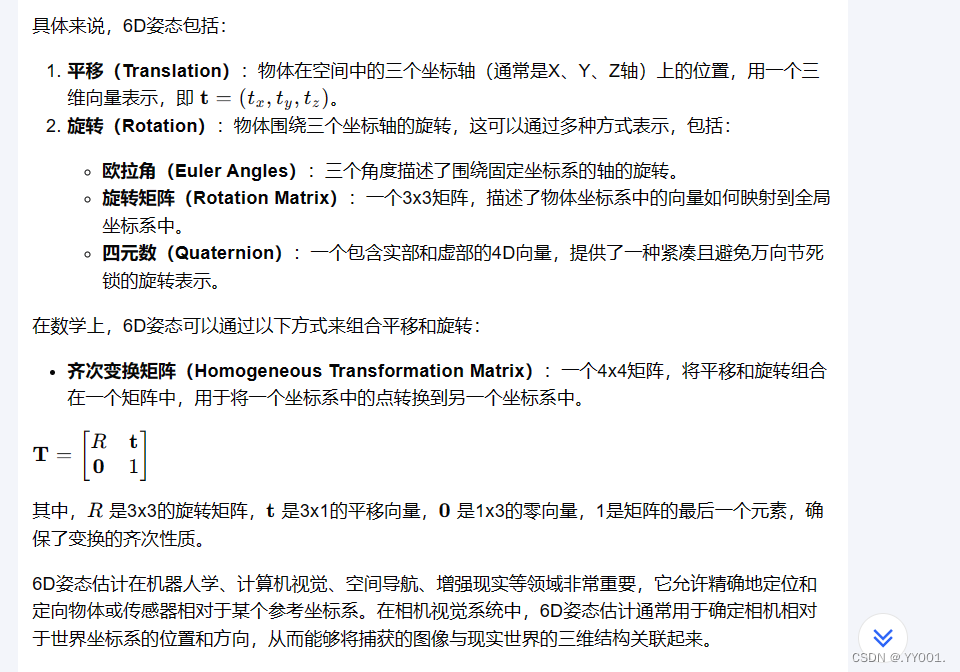
6D位姿
6D是指6个自由度,代表了3个自由度的位移 (也叫平移 (Translation)),以及3个自由度的空间旋转 (Rotation),合起来就叫位姿 (Pose)。位姿是一个相对的概念,指的是两个坐标系之间的位移和旋转变换。物体6D位姿和相机6D位姿是相似的,区别在于从哪个坐标系变换到相机坐标系。
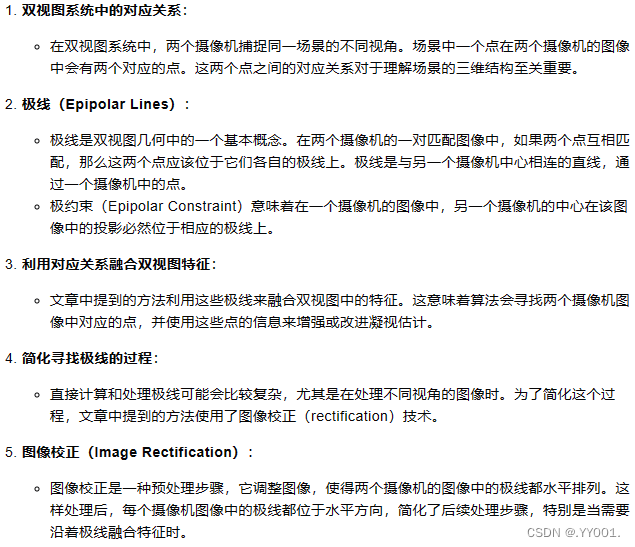
极线融合
参考文章:
利用瞳孔中心和角膜反射的视线估计理论 - 知乎 (zhihu.com)