驱动速腾雷达16线并用rviz显示点云
在将雷达网线与电脑连接后,设置雷达网线地址:

然后输入:
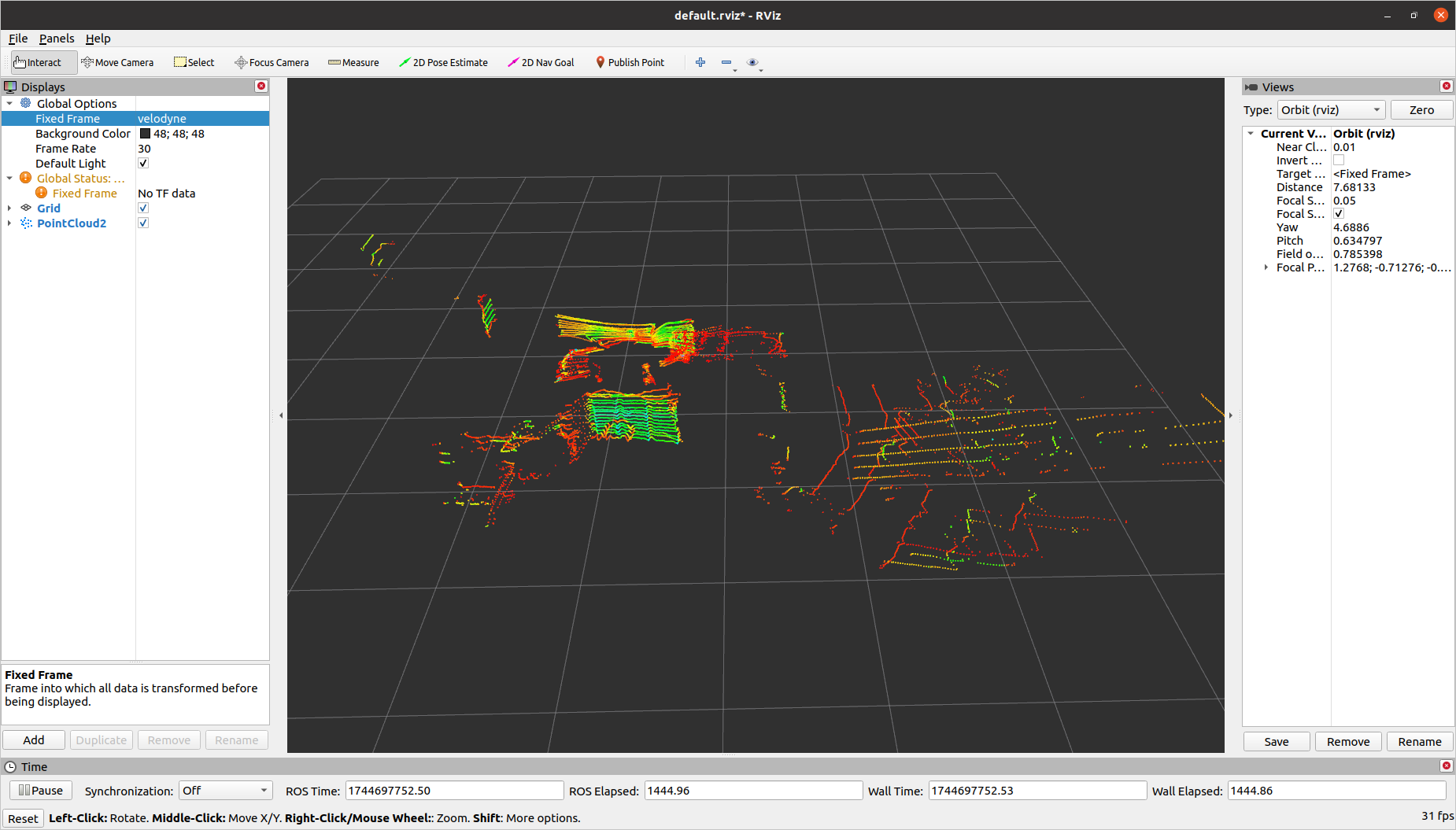
roslaunch rslidar_sdk start.launch紧接着,新建终端,输入rviz,将fix_frame设置为velodyne
这里要看自己的config.yaml文件 ,我的是velodyne
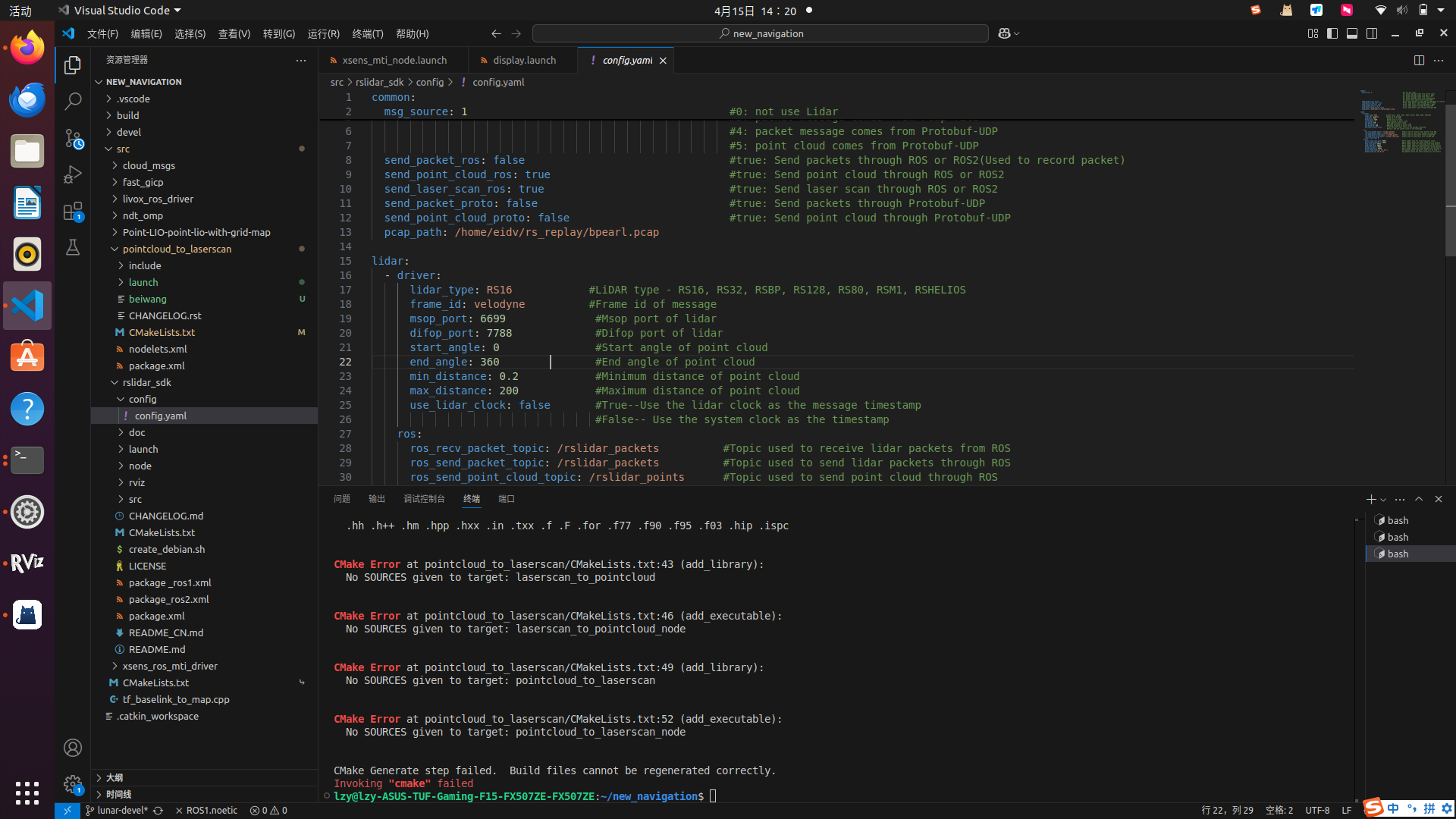
此外,添加pointcloud话题,显示如下图:
在将雷达网线与电脑连接后,设置雷达网线地址:
然后输入:
roslaunch rslidar_sdk start.launch紧接着,新建终端,输入rviz,将fix_frame设置为velodyne
这里要看自己的config.yaml文件 ,我的是velodyne
此外,添加pointcloud话题,显示如下图: