当前位置: 首页 > news >正文 滚轮控制目标臂长度调整相机距离 news 2025/10/15 7:05:27 通过鼠标滚轮来控制摄像机目标臂长度 , 调整相机距离 看图就行,不多说,照着连就完事了 查看全文 http://www.dtcms.com/a/132110.html 相关文章: CTF--shell 自动驾驶第一性原理 java -jar 如何持久化运行 华三IRF堆叠技术 Redis 5.0、6.0 和 7.0 版本的核心更新特性总结 flutter 打包mac程序 dmg教程 【CUDA 】第3章 CUDA执行模型——3.5循环展开(1) 探讨HMI(人机界面)设计原则,如何通过优秀的设计提升操作效率和用户体验 第二十六:Map的基本原理 VM虚拟机安装及Ubuntu安装配置 Nacos操作指南 I/O进程(全) RGBD惯性SLAM 电弧光的危害有哪些?我们该如何应对? 分布式热点网络 汽车零部件产线节能提效,工业网关解锁数据采集 “密码” 音乐产业新玩法:NFTs如何颠覆传统与挑战未来? JAVA身份证件图像识别(100%可以用) Python 实现的运筹优化系统数学建模详解(多目标规划模型) 报错:Nlopt DICOM通讯(ACSE->DIMSE->Worklist) STM32电机库 电机控制特性 计算机网络(第四章) TiDB 部署指南(单机模式) CentOS 7 安装 MariaDB 教程 弱口令爆破 亚马逊发货系统突发限制,卖家如何破局? 转发表和路由表的差别 详解关于VS配置好Qt环境之后但无法打开ui界面 Logisim——1位比较器,2位比较器,4位无符号比较器,16位无符号比较器(头歌平台实测通过) Kubernetes Operator 是什么,以及它们的用途
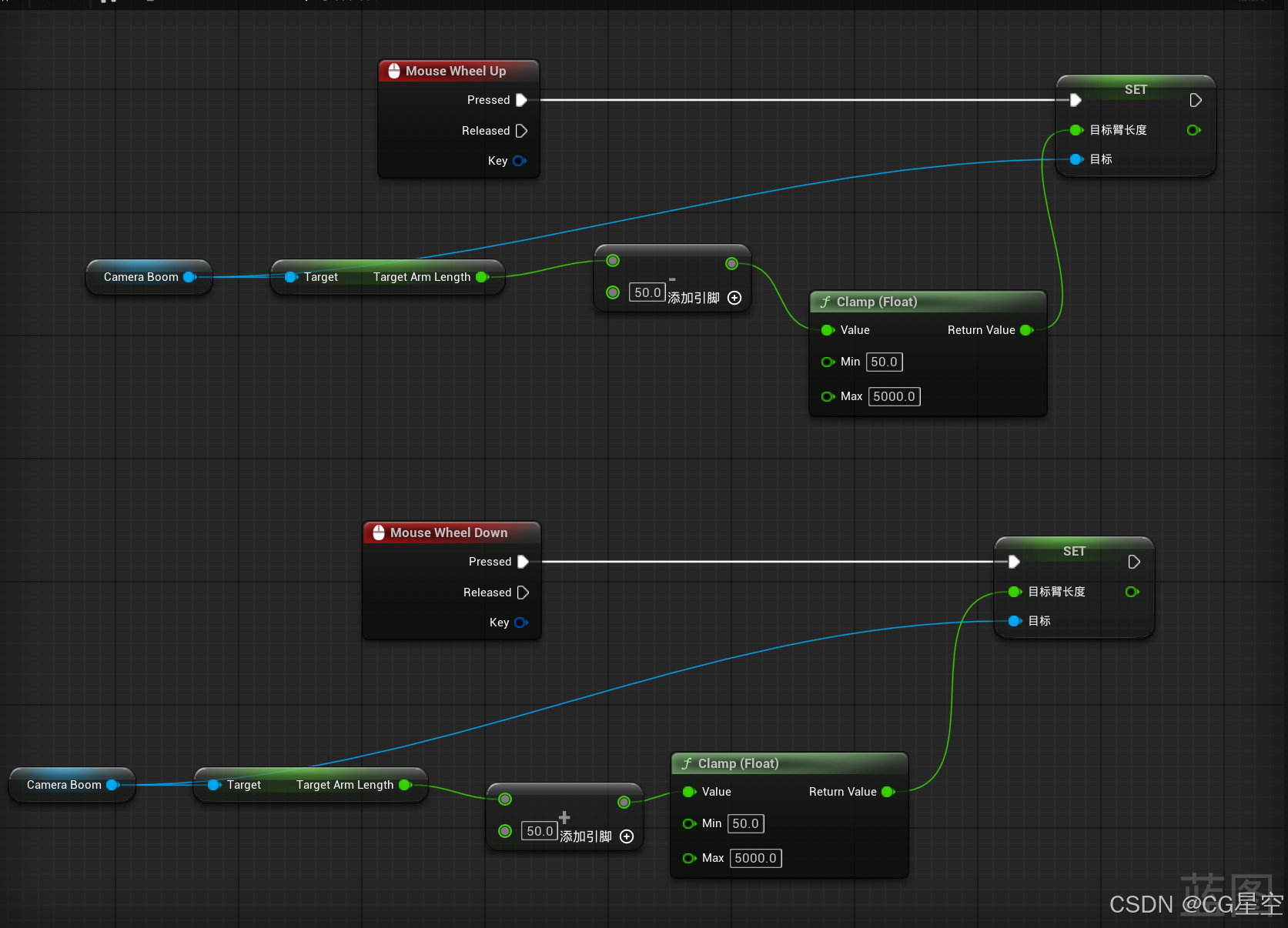
通过鼠标滚轮来控制摄像机目标臂长度 , 调整相机距离 看图就行,不多说,照着连就完事了 查看全文 http://www.dtcms.com/a/132110.html 相关文章: CTF--shell 自动驾驶第一性原理 java -jar 如何持久化运行 华三IRF堆叠技术 Redis 5.0、6.0 和 7.0 版本的核心更新特性总结 flutter 打包mac程序 dmg教程 【CUDA 】第3章 CUDA执行模型——3.5循环展开(1) 探讨HMI(人机界面)设计原则,如何通过优秀的设计提升操作效率和用户体验 第二十六:Map的基本原理 VM虚拟机安装及Ubuntu安装配置 Nacos操作指南 I/O进程(全) RGBD惯性SLAM 电弧光的危害有哪些?我们该如何应对? 分布式热点网络 汽车零部件产线节能提效,工业网关解锁数据采集 “密码” 音乐产业新玩法:NFTs如何颠覆传统与挑战未来? JAVA身份证件图像识别(100%可以用) Python 实现的运筹优化系统数学建模详解(多目标规划模型) 报错:Nlopt DICOM通讯(ACSE->DIMSE->Worklist) STM32电机库 电机控制特性 计算机网络(第四章) TiDB 部署指南(单机模式) CentOS 7 安装 MariaDB 教程 弱口令爆破 亚马逊发货系统突发限制,卖家如何破局? 转发表和路由表的差别 详解关于VS配置好Qt环境之后但无法打开ui界面 Logisim——1位比较器,2位比较器,4位无符号比较器,16位无符号比较器(头歌平台实测通过) Kubernetes Operator 是什么,以及它们的用途