康谋分享 | 仿真驱动、数据自造:巧用合成数据重构智能座舱
随着汽车向智能化、场景化加速演进,智能座舱已成为人车交互的核心承载。从驾驶员注意力监测到儿童遗留检测,从乘员识别到安全带状态判断,座舱内的每一次行为都蕴含着巨大的安全与体验价值。
然而,这些感知系统要在多样驾驶行为、复杂座舱布局和极端光照条件下持续稳定运行,传统的真实数据采集方式已难以支撑其开发迭代需求。智能座舱的技术演进,正由“采集驱动”转向“仿真驱动”。
一、智能座舱仿真的挑战与突破

图1:座舱实例图
智能座舱中的AI系统,不仅需要理解驾驶员的行为和状态,还要同时感知乘员、儿童、宠物乃至环境中的潜在交互风险。其仿真面临几大挑战:
(1)行为维度复杂:如疲劳驾驶、身体遮挡、婴儿误留、饮水打电话等多样行为难以统一采集;
(2)环境变因多样:如夜间光照、红外反射、遮挡物等情况干扰传感器判断;
(3)隐私合规严苛:特别是在儿童检测等场景,获取真实数据存在法律与伦理障碍。
这些因素决定了:高质量的、多模态的合成数据与虚拟仿真,已成为智能座舱感知系统研发不可或缺的支撑工具。
二、合成数据:真实世界外的“数据宇宙”
在智能座舱开发中,获取高质量训练数据往往面临隐私、成本和长尾场景覆盖不足的问题。合成数据以其可控、高效、多样、合规等优势,正成为训练AI感知系统的重要资源。

图2:多种类型传感器下的合成数据(Anyverse)
相比真实数据,合成数据具有以下优势:
(1)全面多样:可灵活生成不同人群、行为、座舱结构与环境变量组合,轻松覆盖极端和低频场景;
(2)精准标注:输出像素级真值、凝视向量、关键点、分割图等,省去人工标注;
(3)高效合规:不涉及真实乘员或儿童影像,天然满足GDPR等隐私法规;
(4)可重复与可扩展:相同条件下随时重建,便于模型对比测试与大规模数据扩增。
在 DMS、OMS、儿童存在检测(CPD)、安全带识别、宠物识别等多个智能座舱感知模块中,合成数据不仅作为训练数据使用,也广泛应用于模型验证、场景补全与鲁棒性测试。
三、研究积累:智能座舱仿真技术的支撑
智能座舱的核心不再只是对驾驶员状态的检测,更在于理解人在车内的各种行为与交互模式。为了实现这一目标,学术界在近几年不断推进舱内仿真与合成数据相关研究,这些成果也为 Anyverse 的平台能力提供了坚实的技术基础。
其中,CVPR 2023 发表的 BEHAVE 数据集是第一个聚焦全身人-物体交互的大规模 3D 数据集。该研究通过多视角 RGB-D 采集与三维重建,精细还原了人类与日常物品之间的自然行为,包括动作接触点、物体遮挡、身体姿态等,为仿真平台构建乘员使用手机、饮水、与物体互动等细致行为场景提供了完整建模方案。

图3:BEHAVE数据集
在视线与注意力建模方面,ICCV 2019 的 Gaze360 提出了无需设备佩戴的 3D 凝视估计方法。该数据集涵盖不同光照和姿态条件下的大量受试者样本,引入时间建模与不确定性表达,为驾驶员注意力评估和视觉交互训练提供了更加贴近实际场景的支持,也使得 Anyverse 能够更加自然地模拟驾驶员在不同状态下的凝视方向和关注点。

图4 :Gaze360视线标注数据集

图5:Anyverse合成的打瞌睡的司机元数据可视化
这些研究标志着舱内感知正从静态姿态识别,逐步迈向对复杂交互行为和多模态信息的深度建模。Anyverse 正是建立在这类前沿研究成果的基础之上,不断拓展其在角色行为生成、传感器仿真、多视角场景构建等方面的能力,助力智能座舱系统走向更加真实、可靠与安全的交互未来。
四、Anyverse:舱内多模态感知仿真平台
Anyverse 是一套专为舱内感知系统设计的多模态仿真平台,覆盖从驾驶员监控(DMS)到乘员识别(OMS)、儿童存在检测(CPD)、安全带识别、红外仿真、雷达仿真等多场景需求。
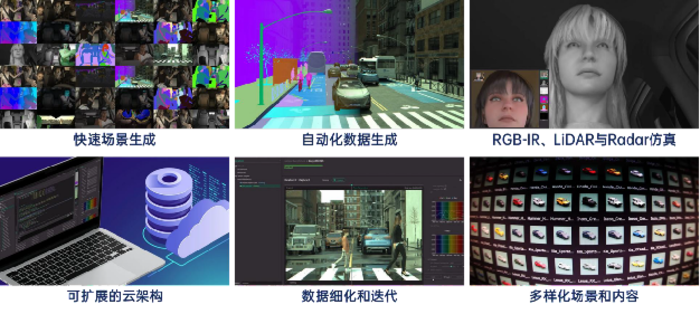
图6:Anyverse功能概览

图7:多样化的舱内合成数据
1、关键功能亮点
(1)多样化舱内合成数据生成
支持多年龄、种族、姿态的角色建模,覆盖儿童座椅状态、宠物遮挡、错误安全带系法等复杂情境,输出 RGB、IR、ToF、Radar 等多传感器格式数据。
(2)快速虚拟验证与闭环测试
适配 Euro NCAP、IIHS、China NCAP 等安全法规标准,提供像素级真值标注、行为追踪与模型性能可视化验证。
(3)物理级传感器仿真引擎
支持基于 SBR 技术的雷达建模、高保真红外与近红外成像、MIMO 系统仿真,输出雷达立方体与点云格式数据。
(4)开放、可复用的数据资产库
提供可自定义的角色、座舱结构、传感器布置与互动物体库,快速构建多变场景,显著降低研发成本。
凭借高保真仿真能力与多模态数据生成优势,Anyverse 展现出在整车厂、Tier 1 与算法研发团队中广泛部署的潜力,正加速舱内感知系统的训练与验证闭环。
五、结语:仿真驱动的智能座舱创新路径
智能座舱的真正挑战,不是识别驾驶员是否闭眼,而是理解“此时此刻车内发生了什么”。这需要多模态、多角色、多行为的精准感知系统,更需要背后支撑它的,一整套高保真、低成本、标准对齐的仿真机制。
从数据生成到算法验证,从法规适配到部署测试,Anyverse 提供的不仅是一个仿真平台,更是智能座舱走向真正“理解人”的关键基础设施。
未来的人车交互,不止于响应,而源于洞察!
参考文献:
1. Sundaram, S., et al. (2023). BEHAVE: Dataset and Method for Tracking Human-Object Interaction. CVPR 2023.
2. Kellnhofer, P., et al. (2019). Gaze360: Physically Unconstrained Gaze Estimation in the Wild. ICCV 2019.
3. Nguyen, T., et al. (2023). Synthevehicle: A Synthetic Dataset and Benchmark for Vehicle Interior Perception. WACV 2023.
我是分享自动驾驶技术的康谋
欢迎关注
AI舱内监控虚拟验证平台 - 快速舱内系统评估 | Euro NCAP标准测试 | 传感器仿真与生物学建模 | 康谋科技康谋Anyverse合成数据方案通过仿真生成高质量、统计平衡的测试数据,覆盖多样化的驾驶场景和人物特征,以虚拟场景、传感器和环境帮助企业快速迭代数据集,满足驾驶员疲劳检测、儿童存在监控等关键功能的测试需求,确保隐私合规性(如GDPR和COPPA)。同时支持定制化数据生成,优化AI系统性能,加速产品上市进程。![]() https://keymotek.com/in-cabin-monitoring-platform_anyverse/?sessionid=-199036394
https://keymotek.com/in-cabin-monitoring-platform_anyverse/?sessionid=-199036394