滤波---卡尔曼滤波
卡尔曼滤波概览
一、定义
卡尔曼滤波是一种基于线性系统和高斯噪声假设的递归最优状态估计算法。其核心目标是通过融合系统模型预测值与传感器测量值,在噪声环境中实时估计系统的动态状态(如位置、速度、加速度等)。
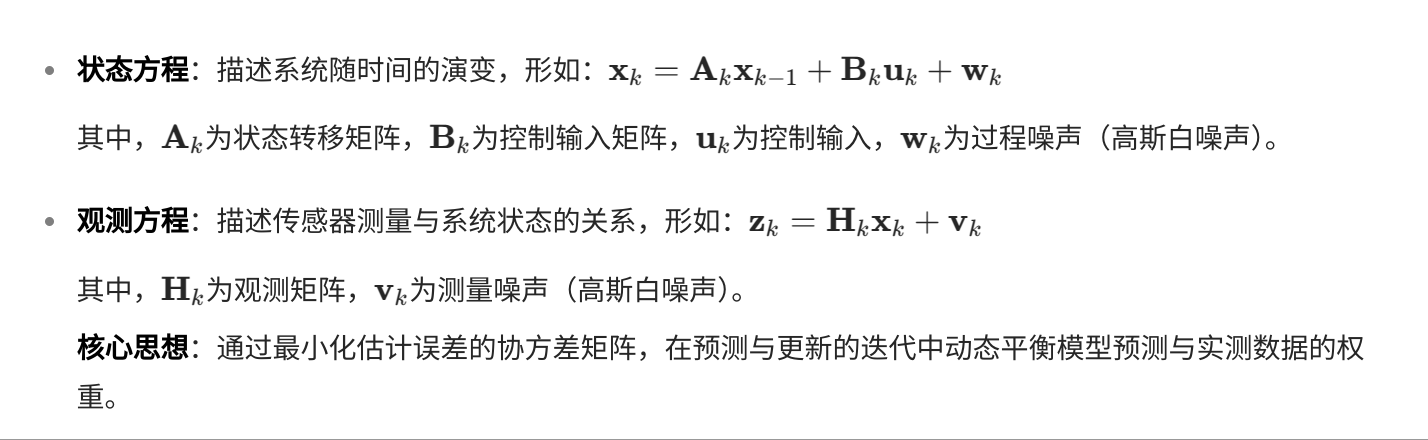
数学基础:
二、核心特点
- 递归性
- 无需历史数据:仅依赖前一时刻的估计值和当前数据,适合实时计算。
- 计算复杂度:O(n³)(n为状态向量维度),适用于低维系统。
- 最优性
- 在线性系统和高斯噪声假设下,卡尔曼滤波能达到最小均方误差(MMSE)意义上的最优估计。
- 数学证明:通过递推求解黎卡提方程(Riccati Equation)实现误差协方差最小化。
- 噪声建模与处理
- 过程噪声:量化系统模型的不确定性(如运动模型误差),用协方差矩阵 Q k Q_k Qk表示。
- 测量噪声:量化传感器误差(如GPS定位噪声),用协方差矩阵 R k R_k Rk表示。
- 通过协方差矩阵动态调整卡尔曼增益,平衡预测与测量的置信度。
- 动态适应性
-
卡尔曼增益 K k K_k Kk根据当前噪声特性自动调整:

若测量噪声大,则更依赖模型预测;若模型不确定,则更依赖测量值。
-
- 局限性
- 对非线性系统和非高斯噪声敏感,需扩展算法(如EKF、UKF、粒子滤波)。
- 对初始值 x 0 x_0 x0和 P 0 P_0 P0敏感,需合理初始化。
三、核心作用
- 状态估计
- 多传感器融合:融合IMU、GPS等数据,提供比单一传感器更精确的状态估计(如无人机定位)。
- 降维与去噪:通过状态空间模型提取关键信息(如从加速度计信号中分离真实运动与噪声)。
- 预测与跟踪
- 前向预测:利用系统模型预测未来状态(如自动驾驶中车辆轨迹预测)。
- 反馈修正:通过实测数据修正预测误差,形成闭环优化。
- 系统控制
- 为控制器提供可靠的状态反馈(如机械臂运动控制)。
- 故障检测
- 通过残差分析(预测值与测量值的差异)监测传感器或模型异常。
四、宏观意义与应用价值
1. 理论贡献:重塑状态估计范式
- 从离线到在线:突破传统滤波(如维纳滤波)需全时域数据的限制,实现实时递归估计,推动动态系统控制理论发展。
- 不确定性量化:通过协方差矩阵 P k P_k Pk显式建模估计误差,为系统设计提供风险评估依据(如自动驾驶中的定位置信度)。
- 贝叶斯滤波特例:作为线性高斯场景下的最优解,为复杂非线性滤波(如粒子滤波)提供理论基准。
2. 工程价值:赋能关键领域
- 导航与定位:在GPS信号丢失时,利用卡尔曼滤波融合惯性数据维持位置估计(如无人机、自动驾驶)。
- 工业控制:实时估计系统状态(如温度、压力),优化控制策略(如PID参数自适应调整)。
- 信号处理:从含噪信号中提取真实信号(如语音降噪、心电图滤波)。
- 航天与遥感:卫星姿态控制、轨道预测,以及遥感图像的去噪与恢复。
- 生物医学:生理信号(如血压、心率)的实时监测与噪声抑制。
3. 学科交叉影响
- 控制理论:为最优控制(如LQR)提供状态反馈所需的估计值,推动模型预测控制(MPC)发展。
- 机器人学:解决SLAM(同步定位与地图构建)中的状态估计问题,实现未知环境下的自主导航。
- 经济学与金融学:用于时间序列分析(如GDP预测、股票波动建模),处理含噪声的动态系统数据。
4. 局限性与改进方向
- 线性与高斯假设限制:真实系统常非线性、非高斯,需依赖EKF、UKF等扩展方法,或转向粒子滤波、贝叶斯网络等非参数化方法。
- 模型误差敏感:对状态转移和观测模型的不准确建模会导致估计偏差(如机动目标跟踪中的模型失配问题)。
- 计算复杂度:状态维度高时(如万维以上),协方差矩阵求逆计算量大,需稀疏化或降维处理(如扩展卡尔曼滤波的改进版本)。
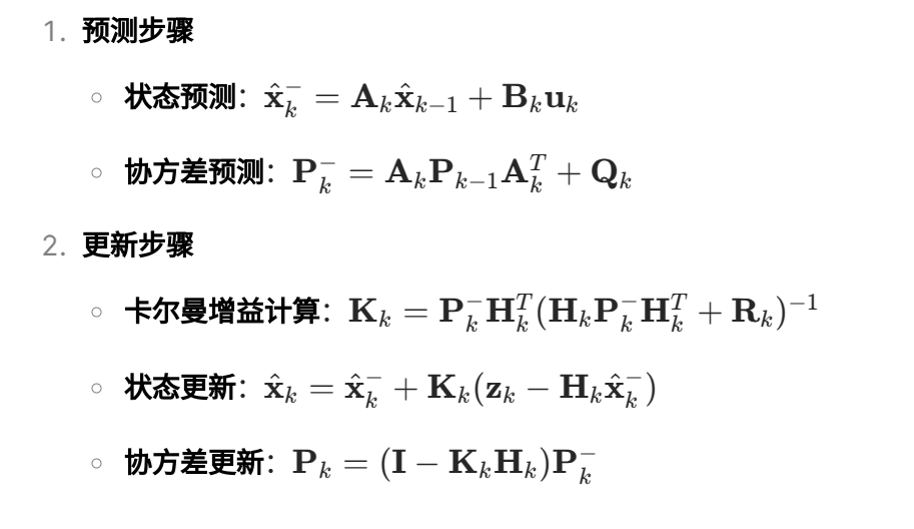
五、数学实现流程
六、扩展与变体
- 扩展卡尔曼滤波(EKF)
- 处理非线性系统,通过泰勒展开线性化状态方程和观测方程。
- 无迹卡尔曼滤波(UKF)
- 采用无迹变换(UT)更精确地近似非线性分布,性能优于EKF。
- 容积卡尔曼滤波(CKF)
- 基于球径向积分准则,适用于高维非线性系统。
- 粒子滤波(PF)
- 非参数化方法,通过蒙特卡洛采样处理非高斯噪声(如多目标跟踪)。
- 平方根卡尔曼滤波(SRKF)
- 数值稳定性更强,避免协方差矩阵的负定问题。
七、总结
| 模块 | 关键知识点 |
|---|---|
| 概念 | 状态空间模型、预测-更新循环、最小均方误差最优性、高斯噪声假设、协方差矩阵递推。 |
| 数学形式 | 状态转移方程、观测方程、五大核心公式(预测与更新步骤)。 |
| 适用系统 | 线性/非线性系统(标准KF/EKF/UKF)、时变/定常系统、多传感器融合、高斯噪声场景。 |
| 宏观意义 | 实时估计能力、不确定性量化、工程领域(导航、控制、信号处理)的基石作用。 |
| 扩展与变种 | EKF、UKF、CKF的原理与应用场景,与贝叶斯滤波的关系。 |
| 局限性与改进 | 非线性处理、模型误差、高维计算问题及对应解决方案。 |
卡尔曼滤波是动态系统状态估计的基石,其递归性和最优性使其在机器人、自动驾驶、航空航天等领域不可或缺。尽管存在对线性和高斯假设的依赖,但其扩展算法(如EKF、UKF)和变体(如粒子滤波)已覆盖更复杂场景。随着传感器技术和计算能力的提升,卡尔曼滤波将继续在智能系统中发挥核心作用。