永磁同步电机模型第三篇之两相电机坐标变换
文章目录
- 前言
- 磁链方程
- 电压方程
- 结论
前言
本文主要介绍两相永磁电机模型的坐标变化极其推导过程。本文主要参考资料:
R.Krishnan.永磁无刷电机及其驱动技术.机械工程出版社
根据上一篇博客<永磁同步电机模型第二篇之两相电机实时模型>,可以得到如下两相永磁同步电机的在静止坐标系下的模型:
电压方程为:
[
V
a
V
b
]
=
[
R
0
0
R
]
[
i
a
i
b
]
+
d
d
t
[
λ
a
λ
b
]
\begin{bmatrix} %该矩阵一共3列,每一列都居中放置 V_a\\ %第一行元素 V_b\\ %第二行元素 \end{bmatrix}= \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 R&0\\ %第一行元素 0&R\\ %第二行元素 \end{bmatrix} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 i_a\\ %第一行元素 i_b\\ %第二行元素 \end{bmatrix}+ \frac{\textup {d}}{\textup {d} t} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \lambda_a\\ %第一行元素 \lambda_b\\ %第二行元素 \end{bmatrix}
[VaVb]=[R00R][iaib]+dtd[λaλb]
磁链方程为:
[
λ
a
λ
b
]
=
[
L
a
L
m
L
m
L
b
]
[
i
a
i
b
]
+
λ
f
[
cos
θ
sin
θ
]
=
[
L
1
−
L
2
cos
2
θ
−
L
2
sin
2
θ
−
L
2
sin
2
θ
L
1
+
L
2
cos
2
θ
]
[
i
a
i
b
]
+
λ
f
[
cos
θ
sin
θ
]
\begin{aligned} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \lambda_a\\ %第一行元素 \lambda_b\\ %第二行元素 \end{bmatrix}&= \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 L_{a}&L_{m}\\ %第一行元素 L_{m}&L_{b}\\ %第二行元素 \end{bmatrix} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 i_a\\ %第一行元素 i_b\\ %第二行元素 \end{bmatrix}+ \lambda_f \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \textup {cos} \theta\\ %第一行元素 \textup {sin} \theta\\ %第二行元素 \end{bmatrix}\\& = \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 L_1-L_2\textup {cos} 2\theta&-L_2\textup {sin} 2\theta\\ %第一行元素 -L_2\textup {sin} 2\theta& L_1+L_2\textup {cos} 2\theta\\ %第二行元素 \end{bmatrix} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 i_a\\ %第一行元素 i_b\\ %第二行元素 \end{bmatrix}+ \lambda_f \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \textup {cos} \theta\\ %第一行元素 \textup {sin} \theta\\ %第二行元素 \end{bmatrix} \end{aligned}
[λaλb]=[LaLmLmLb][iaib]+λf[cosθsinθ]=[L1−L2cos2θ−L2sin2θ−L2sin2θL1+L2cos2θ][iaib]+λf[cosθsinθ]
可以知道,磁链方程中的参数依赖转子的位置,尽管目前计算能力越来越强大,但是求解上述方程依然相当繁琐,而且从上述方程中也无法洞悉到电机的动态性能。这篇博客任务就是,通过变换,消除方程中对转子位置的依赖。
可以借助博客<永磁同步电机模型第一篇之坐标变换>中的2s/2r变换。
磁链方程
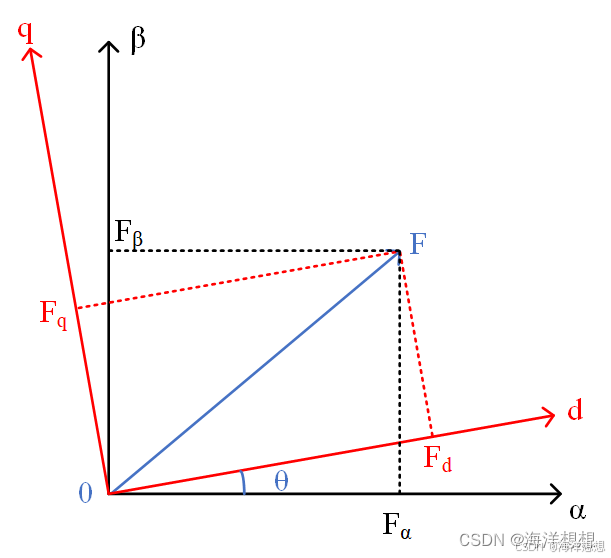
首先可以得到:
[
λ
d
λ
q
]
=
[
cos
θ
sin
θ
−
sin
θ
cos
θ
]
[
λ
a
λ
b
]
\begin{aligned} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \lambda_d\\ %第一行元素 \lambda_q\\ %第二行元素 \end{bmatrix}&= \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \textup{cos} \theta &\textup{sin} \theta \\ %第一行元素 -\textup{sin} \theta& \textup{cos}\theta \\ %第二行元素 \end{bmatrix} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \lambda_a\\ %第一行元素 \lambda_b\\ %第二行元素 \end{bmatrix} \end{aligned}
[λdλq]=[cosθ−sinθsinθcosθ][λaλb]
以及:
[
i
a
i
b
]
=
[
cos
θ
sin
θ
−
sin
θ
cos
θ
]
−
1
[
i
d
i
q
]
=
[
cos
θ
−
sin
θ
sin
θ
cos
θ
]
[
i
d
i
q
]
\begin{aligned} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 i_a\\ %第一行元素 i_b\\ %第二行元素 \end{bmatrix}&= \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \textup{cos} \theta &\textup{sin} \theta \\ %第一行元素 -\textup{sin} \theta& \textup{cos}\theta \\ %第二行元素 \end{bmatrix}^{-1} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 i_d\\ %第一行元素 i_q\\ %第二行元素 \end{bmatrix} \\&= \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \textup{cos} \theta &-\textup{sin} \theta \\ %第一行元素 \textup{sin} \theta& \textup{cos}\theta \\ %第二行元素 \end{bmatrix} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 i_d\\ %第一行元素 i_q\\ %第二行元素 \end{bmatrix} \end{aligned}
[iaib]=[cosθ−sinθsinθcosθ]−1[idiq]=[cosθsinθ−sinθcosθ][idiq]
综上,可以推知:
[
λ
d
λ
q
]
=
[
cos
θ
sin
θ
−
sin
θ
cos
θ
]
(
[
L
1
−
L
2
cos
2
θ
−
L
2
sin
2
θ
−
L
2
sin
2
θ
L
1
+
L
2
cos
2
θ
]
[
i
a
i
b
]
+
λ
f
[
cos
θ
sin
θ
]
)
=
[
cos
θ
sin
θ
−
sin
θ
cos
θ
]
[
L
1
−
L
2
cos
2
θ
−
L
2
sin
2
θ
−
L
2
sin
2
θ
L
1
+
L
2
cos
2
θ
]
[
cos
θ
−
sin
θ
sin
θ
cos
θ
]
[
i
d
i
q
]
+
λ
f
[
cos
θ
sin
θ
−
sin
θ
cos
θ
]
[
cos
θ
sin
θ
]
\begin{aligned} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \lambda_d\\ %第一行元素 \lambda_q\\ %第二行元素 \end{bmatrix}& = \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \textup{cos} \theta &\textup{sin} \theta \\ %第一行元素 -\textup{sin} \theta& \textup{cos}\theta \\ %第二行元素 \end{bmatrix} \left( \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 L_1-L_2\textup {cos} 2\theta&-L_2\textup {sin} 2\theta\\ %第一行元素 -L_2\textup {sin} 2\theta& L_1+L_2\textup {cos} 2\theta\\ %第二行元素 \end{bmatrix} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 i_a\\ %第一行元素 i_b\\ %第二行元素 \end{bmatrix}+ \lambda_f \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \textup {cos} \theta\\ %第一行元素 \textup {sin} \theta\\ %第二行元素 \end{bmatrix} \right)\\&= \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \textup{cos} \theta &\textup{sin} \theta \\ %第一行元素 -\textup{sin} \theta& \textup{cos}\theta \\ %第二行元素 \end{bmatrix} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 L_1-L_2\textup {cos} 2\theta&-L_2\textup {sin} 2\theta\\ %第一行元素 -L_2\textup {sin} 2\theta& L_1+L_2\textup {cos} 2\theta\\ %第二行元素 \end{bmatrix} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \textup{cos} \theta &-\textup{sin} \theta \\ %第一行元素 \textup{sin} \theta& \textup{cos}\theta \\ %第二行元素 \end{bmatrix} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 i_d\\ %第一行元素 i_q\\ %第二行元素 \end{bmatrix}+ \lambda_f \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \textup{cos} \theta &\textup{sin} \theta \\ %第一行元素 -\textup{sin} \theta& \textup{cos}\theta \\ %第二行元素 \end{bmatrix} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \textup {cos} \theta\\ %第一行元素 \textup {sin} \theta\\ %第二行元素 \end{bmatrix}\\ \end{aligned}
[λdλq]=[cosθ−sinθsinθcosθ]([L1−L2cos2θ−L2sin2θ−L2sin2θL1+L2cos2θ][iaib]+λf[cosθsinθ])=[cosθ−sinθsinθcosθ][L1−L2cos2θ−L2sin2θ−L2sin2θL1+L2cos2θ][cosθsinθ−sinθcosθ][idiq]+λf[cosθ−sinθsinθcosθ][cosθsinθ]
分开计算,后半部分:
λ
f
[
cos
θ
sin
θ
−
sin
θ
cos
θ
]
[
cos
θ
sin
θ
]
=
λ
f
[
cos
2
θ
+
sin
2
θ
−
sin
θ
cos
θ
+
cos
θ
sin
θ
]
=
[
λ
f
0
]
\begin{aligned} &\lambda_f \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \textup{cos} \theta &\textup{sin} \theta \\ %第一行元素 -\textup{sin} \theta& \textup{cos}\theta \\ %第二行元素 \end{bmatrix} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \textup {cos} \theta\\ %第一行元素 \textup {sin} \theta\\ %第二行元素 \end{bmatrix}\\ =&\lambda_f \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \textup{cos}^2 \theta +\textup{sin}^2 \theta \\ %第一行元素 -\textup{sin} \theta \textup{cos}\theta+\textup{cos}\theta \textup{sin} \theta \\ %第二行元素 \end{bmatrix}\\=& \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \lambda_f\\ %第一行元素 0\\ %第二行元素 \end{bmatrix}\\ \end{aligned}
==λf[cosθ−sinθsinθcosθ][cosθsinθ]λf[cos2θ+sin2θ−sinθcosθ+cosθsinθ][λf0]
前半部分:
[
cos
θ
sin
θ
−
sin
θ
cos
θ
]
[
L
1
−
L
2
cos
2
θ
−
L
2
sin
2
θ
−
L
2
sin
2
θ
L
1
+
L
2
cos
2
θ
]
[
cos
θ
−
sin
θ
sin
θ
cos
θ
]
[
i
d
i
q
]
=
[
L
1
cos
θ
−
L
2
cos
θ
cos
2
θ
−
L
2
sin
2
θ
sin
θ
L
1
sin
θ
−
L
2
cos
θ
sin
2
θ
+
L
2
sin
θ
cos
2
θ
L
2
sin
θ
cos
2
θ
−
L
2
sin
2
θ
cos
θ
−
L
1
sin
θ
L
2
sin
2
θ
sin
θ
+
L
1
cos
θ
+
L
2
cos
θ
cos
2
θ
]
[
cos
θ
−
sin
θ
sin
θ
cos
θ
]
[
i
d
i
q
]
=
[
(
L
1
−
L
2
)
cos
θ
(
L
1
−
L
2
)
sin
θ
−
(
L
1
+
L
2
)
sin
θ
(
L
1
+
L
2
)
cos
θ
]
[
cos
θ
−
sin
θ
sin
θ
cos
θ
]
[
i
d
i
q
]
=
[
(
L
d
)
cos
θ
(
L
d
)
sin
θ
−
(
L
q
)
sin
θ
(
L
q
)
cos
θ
]
[
cos
θ
−
sin
θ
sin
θ
cos
θ
]
[
i
d
i
q
]
=
[
L
d
0
0
L
q
]
[
i
d
i
q
]
\begin{aligned} &\begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \textup{cos} \theta &\textup{sin} \theta \\ %第一行元素 -\textup{sin} \theta& \textup{cos}\theta \\ %第二行元素 \end{bmatrix} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 L_1-L_2\textup {cos} 2\theta&-L_2\textup {sin} 2\theta\\ %第一行元素 -L_2\textup {sin} 2\theta& L_1+L_2\textup {cos} 2\theta\\ %第二行元素 \end{bmatrix} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \textup{cos} \theta &-\textup{sin} \theta \\ %第一行元素 \textup{sin} \theta& \textup{cos}\theta \\ %第二行元素 \end{bmatrix} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 i_d\\ %第一行元素 i_q\\ %第二行元素 \end{bmatrix}\\ =& \begin{bmatrix} L_1\textup {cos} \theta-L_2\textup {cos} \theta \textup {cos} 2\theta -L_2\textup {sin} 2\theta\textup {sin} \theta& L_1\textup {sin} \theta-L_2\textup {cos} \theta\textup {sin} 2\theta+L_2\textup {sin} \theta\textup {cos} 2\theta\\ L_2\textup {sin} \theta\textup {cos} 2\theta -L_2\textup {sin} 2\theta\textup {cos} \theta -L_1\textup {sin} \theta&L_2\textup {sin} 2\theta\textup {sin} \theta+ L_1\textup {cos} \theta+L_2\textup {cos} \theta\textup {cos} 2\theta\\ \end{bmatrix} \begin{bmatrix} \textup{cos} \theta &-\textup{sin} \theta \\ \textup{sin} \theta& \textup{cos}\theta \\ \end{bmatrix} \begin{bmatrix} i_d\\ i_q\\ \end{bmatrix}\\=& \begin{bmatrix} (L_1-L_2)\textup {cos} \theta&(L_1-L_2)\textup {sin} \theta\\ -(L_1+L_2)\textup {sin} \theta&(L_1+L_2)\textup {cos} \theta\\ \end{bmatrix} \begin{bmatrix} \textup{cos} \theta &-\textup{sin} \theta \\ \textup{sin} \theta& \textup{cos}\theta \\ \end{bmatrix} \begin{bmatrix} i_d\\ i_q\\ \end{bmatrix}\\=& \begin{bmatrix} (L_d)\textup {cos} \theta&(L_d)\textup {sin} \theta\\ -(L_q)\textup {sin} \theta&(L_q)\textup {cos} \theta\\ \end{bmatrix} \begin{bmatrix} \textup{cos} \theta &-\textup{sin} \theta \\ \textup{sin} \theta& \textup{cos}\theta \\ \end{bmatrix} \begin{bmatrix} i_d\\ i_q\\ \end{bmatrix}\\=& \begin{bmatrix} L_d&0\\ 0&L_q\\ \end{bmatrix} \begin{bmatrix} i_d\\ i_q\\ \end{bmatrix}\\ \end{aligned}
====[cosθ−sinθsinθcosθ][L1−L2cos2θ−L2sin2θ−L2sin2θL1+L2cos2θ][cosθsinθ−sinθcosθ][idiq][L1cosθ−L2cosθcos2θ−L2sin2θsinθL2sinθcos2θ−L2sin2θcosθ−L1sinθL1sinθ−L2cosθsin2θ+L2sinθcos2θL2sin2θsinθ+L1cosθ+L2cosθcos2θ][cosθsinθ−sinθcosθ][idiq][(L1−L2)cosθ−(L1+L2)sinθ(L1−L2)sinθ(L1+L2)cosθ][cosθsinθ−sinθcosθ][idiq][(Ld)cosθ−(Lq)sinθ(Ld)sinθ(Lq)cosθ][cosθsinθ−sinθcosθ][idiq][Ld00Lq][idiq]
综上:
[
λ
d
λ
q
]
=
[
L
d
0
0
L
q
]
[
i
d
i
q
]
+
[
λ
f
0
]
\begin{aligned} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \lambda_d\\ %第一行元素 \lambda_q\\ %第二行元素 \end{bmatrix}&= \begin{bmatrix} L_d&0\\ 0&L_q\\ \end{bmatrix} \begin{bmatrix} i_d\\ i_q\\ \end{bmatrix}+ \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \lambda_f\\ %第一行元素 0\\ %第二行元素 \end{bmatrix}\\ \end{aligned}
[λdλq]=[Ld00Lq][idiq]+[λf0]
即:
λ
d
=
L
d
i
d
+
λ
f
λ
q
=
L
q
i
q
\begin{aligned} \lambda_d&=L_di_d+ \lambda_f\\ \lambda_q&=L_qi_q \end{aligned}
λdλq=Ldid+λf=Lqiq
电压方程
[
V
d
V
q
]
=
[
cos
θ
sin
θ
−
sin
θ
cos
θ
]
[
V
a
V
b
]
=
[
cos
θ
sin
θ
−
sin
θ
cos
θ
]
[
R
0
0
R
]
[
i
a
i
b
]
+
[
cos
θ
sin
θ
−
sin
θ
cos
θ
]
d
d
t
[
λ
a
λ
b
]
=
[
R
0
0
R
]
[
i
d
i
q
]
+
[
cos
θ
sin
θ
−
sin
θ
cos
θ
]
d
d
t
[
λ
a
λ
b
]
\begin{aligned} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 V_d\\ %第一行元素 V_q\\ %第二行元素 \end{bmatrix}&= \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \textup{cos} \theta &\textup{sin} \theta \\ %第一行元素 -\textup{sin} \theta& \textup{cos}\theta \\ %第二行元素 \end{bmatrix} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 V_a\\ %第一行元素 V_b\\ %第二行元素 \end{bmatrix}\\&= \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \textup{cos} \theta &\textup{sin} \theta \\ %第一行元素 -\textup{sin} \theta& \textup{cos}\theta \\ %第二行元素 \end{bmatrix} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 R&0\\ %第一行元素 0&R\\ %第二行元素 \end{bmatrix} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 i_a\\ %第一行元素 i_b\\ %第二行元素 \end{bmatrix}+ \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \textup{cos} \theta &\textup{sin} \theta \\ %第一行元素 -\textup{sin} \theta& \textup{cos}\theta \\ %第二行元素 \end{bmatrix} \frac{\textup {d}}{\textup {d} t} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \lambda_a\\ %第一行元素 \lambda_b\\ %第二行元素 \end{bmatrix}\\&= \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 R&0\\ %第一行元素 0&R\\ %第二行元素 \end{bmatrix} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 i_d\\ %第一行元素 i_q\\ %第二行元素 \end{bmatrix}+ \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \textup{cos} \theta &\textup{sin} \theta \\ %第一行元素 -\textup{sin} \theta& \textup{cos}\theta \\ %第二行元素 \end{bmatrix} \frac{\textup {d}}{\textup {d} t} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \lambda_a\\ %第一行元素 \lambda_b\\ %第二行元素 \end{bmatrix}\ \end{aligned}
[VdVq]=[cosθ−sinθsinθcosθ][VaVb]=[cosθ−sinθsinθcosθ][R00R][iaib]+[cosθ−sinθsinθcosθ]dtd[λaλb]=[R00R][idiq]+[cosθ−sinθsinθcosθ]dtd[λaλb]
又因为:
[
cos
θ
sin
θ
−
sin
θ
cos
θ
]
d
d
t
[
λ
a
λ
b
]
+
d
d
t
[
cos
θ
sin
θ
−
sin
θ
cos
θ
]
[
λ
a
λ
b
]
=
d
d
t
(
[
cos
θ
sin
θ
−
sin
θ
cos
θ
]
[
λ
a
λ
b
]
)
\begin{aligned} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \textup{cos} \theta &\textup{sin} \theta \\ %第一行元素 -\textup{sin} \theta& \textup{cos}\theta \\ %第二行元素 \end{bmatrix} \frac{\textup {d}}{\textup {d} t} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \lambda_a\\ %第一行元素 \lambda_b\\ %第二行元素 \end{bmatrix}+ \frac{\textup {d}}{\textup {d} t} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \textup{cos} \theta &\textup{sin} \theta \\ %第一行元素 -\textup{sin} \theta& \textup{cos}\theta \\ %第二行元素 \end{bmatrix} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \lambda_a\\ %第一行元素 \lambda_b\\ %第二行元素 \end{bmatrix}= \frac{\textup {d}}{\textup {d} t} \left( \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \textup{cos} \theta &\textup{sin} \theta \\ %第一行元素 -\textup{sin} \theta& \textup{cos}\theta \\ %第二行元素 \end{bmatrix} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \lambda_a\\ %第一行元素 \lambda_b\\ %第二行元素 \end{bmatrix} \right) \end{aligned}
[cosθ−sinθsinθcosθ]dtd[λaλb]+dtd[cosθ−sinθsinθcosθ][λaλb]=dtd([cosθ−sinθsinθcosθ][λaλb])
所以:
[
cos
θ
sin
θ
−
sin
θ
cos
θ
]
d
d
t
[
λ
a
λ
b
]
=
d
d
t
(
[
cos
θ
sin
θ
−
sin
θ
cos
θ
]
[
λ
a
λ
b
]
)
−
d
d
t
[
cos
θ
sin
θ
−
sin
θ
cos
θ
]
[
λ
a
λ
b
]
=
d
d
t
[
λ
d
λ
q
]
−
w
[
−
sin
θ
cos
θ
−
cos
θ
−
sin
θ
]
[
λ
a
λ
b
]
=
d
d
t
[
λ
d
λ
q
]
+
w
[
−
λ
q
λ
d
]
\begin{aligned} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \textup{cos} \theta &\textup{sin} \theta \\ %第一行元素 -\textup{sin} \theta& \textup{cos}\theta \\ %第二行元素 \end{bmatrix} \frac{\textup {d}}{\textup {d} t} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \lambda_a\\ %第一行元素 \lambda_b\\ %第二行元素 \end{bmatrix}&= \frac{\textup {d}}{\textup {d} t} \left( \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \textup{cos} \theta &\textup{sin} \theta \\ %第一行元素 -\textup{sin} \theta& \textup{cos}\theta \\ %第二行元素 \end{bmatrix} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \lambda_a\\ %第一行元素 \lambda_b\\ %第二行元素 \end{bmatrix} \right)- \frac{\textup {d}}{\textup {d} t} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \textup{cos} \theta &\textup{sin} \theta \\ %第一行元素 -\textup{sin} \theta& \textup{cos}\theta \\ %第二行元素 \end{bmatrix} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \lambda_a\\ %第一行元素 \lambda_b\\ %第二行元素 \end{bmatrix}\\ &= \frac{\textup {d}}{\textup {d} t} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \lambda_d\\ %第一行元素 \lambda_q\\ %第二行元素 \end{bmatrix}-w \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 -\textup{sin} \theta &\textup{cos} \theta \\ %第一行元素 -\textup{cos} \theta& -\textup{sin}\theta \\ %第二行元素 \end{bmatrix} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \lambda_a\\ %第一行元素 \lambda_b\\ %第二行元素 \end{bmatrix}\\ &=\frac{\textup {d}}{\textup {d} t} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \lambda_d\\ %第一行元素 \lambda_q\\ %第二行元素 \end{bmatrix}+w \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 -\lambda_q\\ %第一行元素 \lambda_d\\ %第二行元素 \end{bmatrix} \end{aligned}
[cosθ−sinθsinθcosθ]dtd[λaλb]=dtd([cosθ−sinθsinθcosθ][λaλb])−dtd[cosθ−sinθsinθcosθ][λaλb]=dtd[λdλq]−w[−sinθ−cosθcosθ−sinθ][λaλb]=dtd[λdλq]+w[−λqλd]
其中
w
=
d
θ
d
t
w= \frac{\textup {d}\theta}{\textup {d} t}
w=dtdθ
综上:
[
V
d
V
q
]
=
[
R
0
0
R
]
[
i
d
i
q
]
+
d
d
t
[
λ
d
λ
q
]
+
w
[
−
λ
q
λ
d
]
\begin{aligned} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 V_d\\ %第一行元素 V_q\\ %第二行元素 \end{bmatrix}&= \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 R&0\\ %第一行元素 0&R\\ %第二行元素 \end{bmatrix} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 i_d\\ %第一行元素 i_q\\ %第二行元素 \end{bmatrix}+ \frac{\textup {d}}{\textup {d} t} \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 \lambda_d\\ %第一行元素 \lambda_q\\ %第二行元素 \end{bmatrix}+w \begin{bmatrix} %该矩阵一共3列,每一列都居中放置 -\lambda_q\\ %第一行元素 \lambda_d\\ %第二行元素 \end{bmatrix} \end{aligned}
[VdVq]=[R00R][idiq]+dtd[λdλq]+w[−λqλd]
即:
V
d
=
R
i
d
+
d
λ
d
d
t
−
w
λ
q
V
q
=
R
i
q
+
d
λ
q
d
t
+
w
λ
d
\begin{aligned} V_d&=Ri_d+ \frac{\textup {d} \lambda_d}{\textup {d} t}-w \lambda_q\\ V_q&=Ri_q +\frac{\textup {d} \lambda_q}{\textup {d} t}+w \lambda_d \end{aligned}
VdVq=Rid+dtdλd−wλq=Riq+dtdλq+wλd
结论
经过坐标变换之后,在dq坐标系中,永磁同步电机的电压方程为:
V
d
=
R
i
d
+
d
λ
d
d
t
−
w
λ
q
V
q
=
R
i
q
+
d
λ
q
d
t
+
w
λ
d
\begin{aligned} V_d&=Ri_d+ \frac{\textup {d} \lambda_d}{\textup {d} t}-w \lambda_q\\ V_q&=Ri_q +\frac{\textup {d} \lambda_q}{\textup {d} t}+w \lambda_d \end{aligned}
VdVq=Rid+dtdλd−wλq=Riq+dtdλq+wλd
磁链方程为:
λ
d
=
L
d
i
d
+
λ
f
λ
q
=
L
q
i
q
\begin{aligned} \lambda_d&=L_di_d+ \lambda_f\\ \lambda_q&=L_qi_q \end{aligned}
λdλq=Ldid+λf=Lqiq
在dq坐标系中,电压矢量不在依赖转子位置,而与转子的速度有关,因此,仅当速度恒定时,系统方程为线性方程。在转子速度发生变化的情况下,如果速度变化是由于电流变化引起的,那么,此时的系统方程为非线性的。