MATLAB例程:TOA测距定位,三维任意(>3)个锚节点,对一个未知点定位、带EKF的轨迹解算(附代码下载链接)
代码中的参数设置(如噪声协方差矩阵)可以根据实际应用场景进行调整,以适应不同的环境条件。
文章目录
- 代码的详细介绍
- 算法原理
- 核心功能模块
- 实现架构
- 应用场景
- 注意事项
- 运行结果
- matlab代码
代码的详细介绍
算法原理
本程序采用到达时间(TOA)的测距技术,动态轨迹使用EKF滤波,结合形成三维定位方案。系统通过构建最小二乘数学模型进行空间几何解算,并运用扩展卡尔曼滤波(EKF)对移动目标的运动状态进行动态估计,有效提升复杂环境下的定位稳定性。
核心功能模块
- 动态轨迹仿真:通过建模生成三维运动学模型,模拟目标在三维空间中的连续运动状态
- 可自适应锚点数量:可配置的锚节点阵列,支持三维空间内多参考节点的任意拓扑部署(满足锚点数量>3即可)
- TOA观测系统:
- 实时计算目标与各锚节点间的欧氏距离
- 构建包含高斯白噪声的时延观测模型
- 基于线性最小二乘准则实现位置初步估计
- 动态状态估计器:
- 建立包含位置-速度的六维状态空间模型
- 设计双阶段卡尔曼滤波器(预测-校正机制)
- 自适应调节过程噪声与量测噪声协方差
- 多维可视化平台:
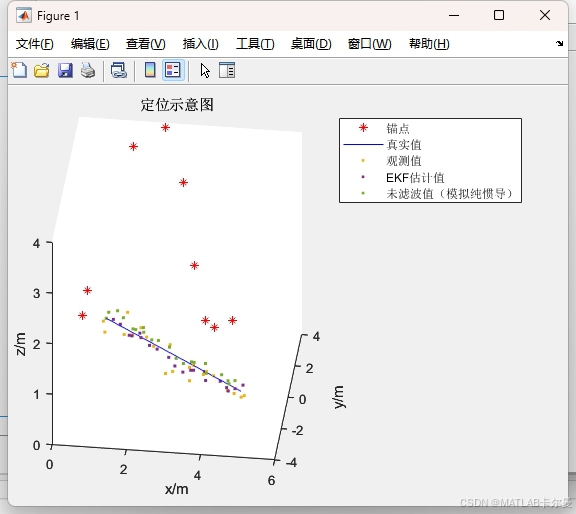
- 三维空间拓扑呈现(锚点分布/真实路径/观测轨迹/滤波轨迹)
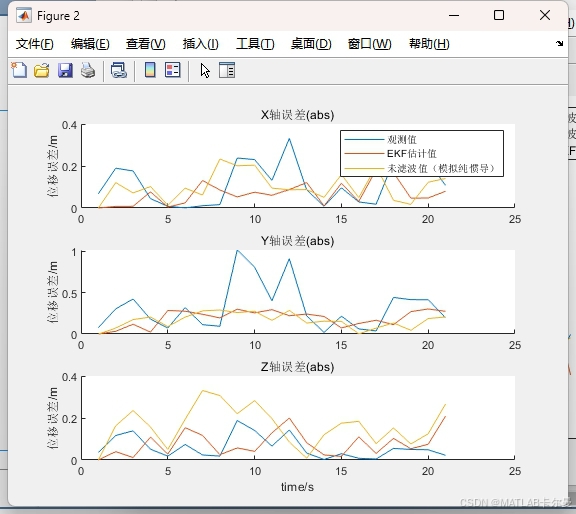
- 各轴向误差时序分析(X/Y/Z轴方向误差分量)
- 统计特性评估(时变RMSE指标计算与输出)
实现架构
-
环境初始化层
- 定义电磁波传播速率常量
- 构建目标运动学方程(包含位置/速度参数)
- 生成锚节点空间坐标矩阵
-
TOA解算引擎
- 距离计算:‖目标-锚点‖₂范数运算
- 噪声注入:附加高斯分布的时延扰动
- 矩阵化求解:通过伪逆运算(pinv)解超定方程组
-
EKF滤波框架
- 状态模型:F矩阵定义线性状态转移关系
- 观测模型:H矩阵构建非线性观测方程
- 协方差更新:Q、R矩阵分别表征过程与量测不确定性
- 迭代机制:时间更新与量测更新交替执行
-
数据可视化系统
- 三维轨迹对比图:plot3函数多图层渲染
- 误差分析图:subplot绘制多轴误差曲线
- 色彩编码:真实值(红)、观测值(蓝)、滤波值(绿)
-
效能评估模块
- 逐时刻误差统计: R M S E = ( Δ x 2 + Δ y 2 + Δ z 2 ) RMSE = \sqrt{(Δx²+Δy²+Δz²)} RMSE=(Δx2+Δy2+Δz2)
- 终端输出:格式化显示最终时刻各轴向误差
- 数据持久化:工作空间变量保存定位过程数据
该实现方案体现了经典定位算法与现代滤波理论的有机结合,适用于无线传感器网络定位、室内导航系统等需要动态位置跟踪的场景。通过调整锚节点配置与噪声参数,可进行不同场景下的定位性能仿真分析。
应用场景
这段代码适用于无线通信、自动驾驶、无人机定位等领域,能够提供对动态目标的精确定位和轨迹跟踪。
注意事项
- 用户可以根据需要调整锚节点的数量和噪声水平,以优化定位精度。
- 代码中的参数设置,比如噪声协方差矩阵,可以根据实际应用环境进行调整,以适应不同的条件。
运行结果
定位示意图与轨迹输出:
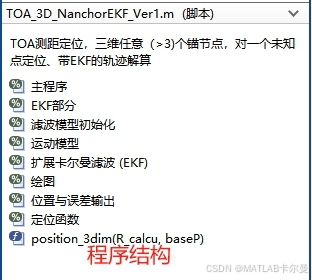
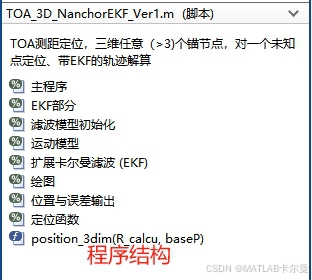
程序结构:
三维误差曲线:
命令行误差特性输出:
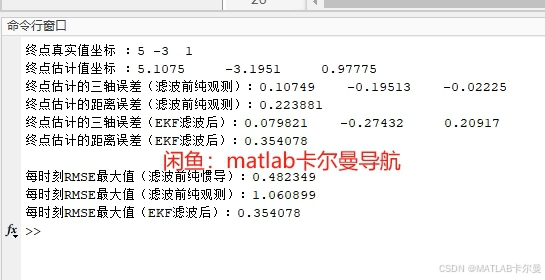
matlab代码
程序结构:
部分代码如下:
% TOA测距定位,三维任意(>3)个锚节点,对一个未知点定位、带EKF的轨迹解算
% 2025-03-13/Ver1
clear;clc;close all;
rng(0);
%% 主程序
c = 3e8; %信号传输速度,即光速
range_err = 1e-9; %时钟与时间计算误差
point1 = [1,1,1]; %待求点坐标真值
% 生成目标的运动
positions = repmat(point1,21,1)+[0:0.2:4;0:-0.2:-4;zeros(1,21)]';
for i1 = 1:size(positions,1)
point1 = positions(i1,:);
n = 9; %定义锚节点数量
baseP = 2*[sin(1:n)+0.01*[1:n]+1;cos(4*(1:n))+0.01*[1:n]+1;cos(2*(1:n))+0.01*[1:n]+1]';
R_real = sqrt(diag((point1-baseP)*(point1'-baseP')));
TOA = R_real/c+range_err*randn; %含噪声的传播时间
R_calcu = TOA*c;
p_out(i1,:) = position_3dim(R_calcu,baseP);
end
%% EKF部分
%% 滤波模型初始化
t = 1:1:size(positions,1); %设置时间序列
Q = 0.01 * diag([1, 1, 1]); % 过程噪声协方差矩阵
w = sqrt(Q) * randn(size(Q, 1), length(t)); % 过程噪声
R = 1 * diag([1, 1, 1]); % 观测噪声协方差矩阵
% v = sqrt(R) * randn(size(R, 1), length(t)); % 观测噪声
P0 = 0.2 * eye(3); % 初始状态协方差矩阵
X = zeros(3, length(t)); % 真实状态
X_ekf = zeros(3, length(t)); % 扩展卡尔曼滤波估计的状态
Z = zeros(3, length(t)); % 观测值形式
Z(:, 1) = [X(1,1); X(2, 1); X(3, 1)]; % 设置观测量初值
%% 运动模型
X_ = zeros(3, length(t)); %给带误差的(未滤波的)状态量建立空间
X_ekf(:, 1) = positions(1,:)';
完整代码下载链接:https://download.csdn.net/download/callmeup/90485541
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者