5、STL中priority_queue的使用方法
一、了解
priority_queue 用于实现优先队列(堆)。它基于 std::vector(默认使用vector) 或 std::deque 实现,默认情况下是一个最大堆(即队首元素是最大的元素)。
- 对于异常处理,空队列一般自定义,但是priority_queue 会使用std::out_of_range异常。
- 时间复杂度
- 插入操作:O(log n)
- 删除操作:O(log n)
- 访问队首元素:O(1)
常见问题
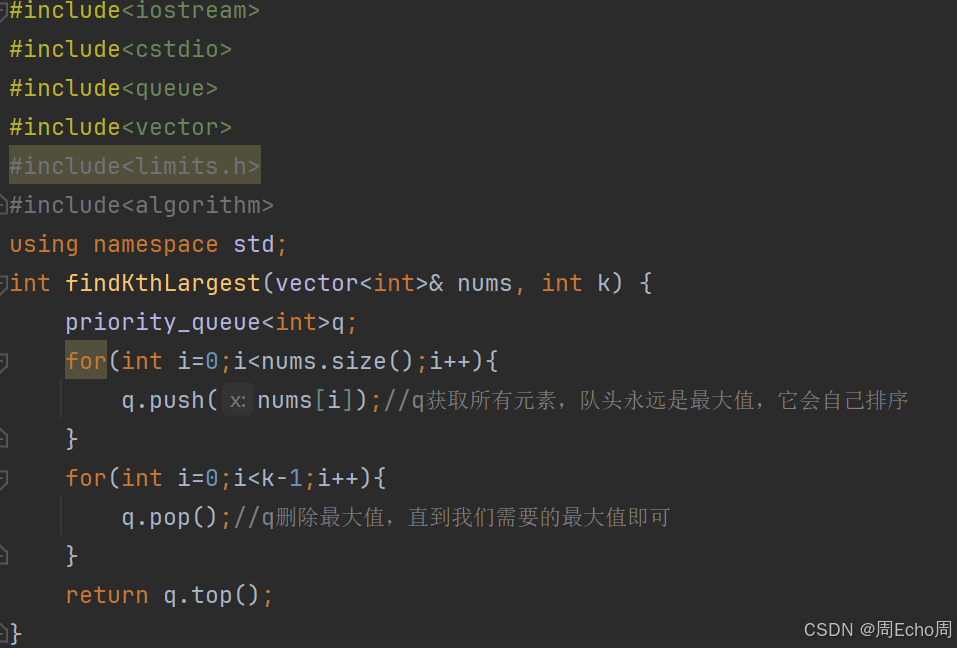
1、如何从给定的无序数组中找到第 K 大的元素?
- 参考题目力扣215数组中的第k个最大元素
2、实现一个优先队列,并解释它的插入和删除操作的时间复杂度。
- 优先队列是堆结构
- 插入:把新元素放到最后,再与其他元素对比后上浮到合适位置。
- 删除:删除的是堆顶。删除后,把最后的元素移到最上面,然后再下浮到合适位置。
- 插入操作时间复杂度:O(log n)
- 删除操作时间复杂度:O(log n)
3、什么是堆排序?它的时间复杂度和空间复杂度是多少?
- 堆排序:通过构建堆,将数组中的元素按升序或降序排列。
- 时间复杂度:O(n log n) 空间复杂度:O(1)(就地排序)
4、二叉堆和斐波那契堆有什么区别?它们的操作的时间复杂度有何不同?
- 二叉堆和斐波那契堆主要区别在于他们的操作有不同时间复杂度。
- 二叉堆:插入和删除的时间复杂度是O(log n)
- 菲波那切堆:插入和减小都是O(1),删除最小元素是O(log n)但是均摊时间复杂度。
5、如何在 O(n) 时间复杂度内构建一个堆?
- 找到最后一个非叶子节点:最后一个非叶子节点的索引为 n/2 - 1(其中 n 是数组的长度)。
- 从后向前调整:从最后一个非叶子节点开始,向前遍历每个节点,对每个节点执行“下沉”操作,确保以该节点为根的子树满足堆的性质。
//使用的头文件
#include<queue>
二、初始化
priority< typename> name;
priority<typename,sequence >name;
priority_queue<int>q1;//最大堆,堆顶是最大值
priority_queue<int,vector<int>>q2;//最小堆,堆顶是最小值
三、常用函数
1、总结

2、例子
首先是这里用到的头文件
#include< iostream>
#include< cstdio>
#include< queue>
using namespace std;
2.1、插入操作
- q.push(value)
int main(){
priority_queue<int>q1;//最大堆,堆顶是最大值
q1.push(1);
q1.push(4);
q1.push(2);
q1.push(3);
while(q1.empty()==0){
cout<<q1.top()<<" ";//4 3 2 1
q1.pop();
}
}
- q.pop()
int main(){
priority_queue<int>q1;//最大堆,堆顶是最大值
q1.push(1);
q1.push(4);
q1.push(2);
q1.push(3);
q1.pop();
while(q1.empty()==0){
cout<<q1.top()<<" ";//3 2 1
q1.pop();
}
}
2.2、访问操作
- q.top()
int main(){
priority_queue<int>q1;//最大堆,堆顶是最大值
q1.push(1);
q1.push(4);
q1.push(2);
q1.push(3);
printf("%d",q1.top());//4
}
2.3、容量操作
- q.empty()
int main(){
priority_queue<int>q1;//最大堆,堆顶是最大值
q1.push(1);
q1.push(4);
q1.push(2);
q1.push(3);
if(q1.empty()==1){
cout<<"q1是空的"<<endl;
}else{
cout<<"q1不是空的"<<endl;
}
}
- q.size()
priority_queue<int>q;
q.push(1);
int num =q.size();
cout<<num<<endl;//1