基于分数阶重复控制器的永磁同步电机转矩脉动抑制
1. 重复控制器的基本原理
重复控制器(Repetitive Control, RC)基于内模原理,通过在控制器中嵌入周期性扰动的数学模型,实现对周期性误差的渐近跟踪和抑制。其核心结构包含一个时延环节和一个补偿器,通常表示为:
CRC(z)=z−N1−z−NQ(z)CRC(z)=1−z−Nz−NQ(z)
其中,z−Nz−N 为基波周期的整数倍延迟,Q(z)Q(z) 为补偿滤波器,用于保证系统稳定性。重复控制器通过逐周期累积误差并修正控制信号,最终消除周期性扰动。
2. 在电机转矩六倍频抑制中的应用
在永磁同步电机(PMSM)等电机中,由于逆变器换相、齿槽效应或磁场畸变,转矩脉动常以基频的整数倍谐波形式出现。例如:
-
六倍频转矩脉动通常由三相逆变器的开关动作或电机极数与槽数的配合引起(如每转6次换相)。
-
这种脉动会降低电机运行平稳性,产生振动和噪声,影响高精度应用(如机器人、电动汽车)。
重复控制器通过以下方式抑制六倍频扰动:
-
内模匹配:将六倍频对应的周期嵌入控制器,确保对特定频率扰动的零稳态误差。
-
逐周期修正:在每个基波周期(或六倍频周期)内更新控制量,逐步抵消扰动。
-
动态补偿:结合PI控制器或前馈策略,提升动态响应和抗干扰能力。
3. 小数阶重复控制器与延迟模块
传统重复控制器要求扰动周期为基波周期的整数倍,但在实际系统中可能面临以下问题:
-
扰动频率非整数倍(如变频运行或非对称负载)。
-
系统存在时变延迟或频率波动。
-
优势:
-
更灵活匹配实际扰动周期,提升控制精度。
-
适应变频或非稳态工况(如电机加速/减速)。
-
-
挑战:
-
需平衡计算复杂度和精度,尤其在嵌入式系统中。
-
稳定性分析需结合分数阶系统理论或频域方法(如Nyquist判据)。
-
4. 应用示例
-
变频电机控制:在风力发电或电动汽车中,电机转速变化导致扰动频率偏移,小数阶重复控制器可动态调整延迟时间。
-
多谐波抑制:结合多个小数阶延迟模块,同时抑制多个非整数倍谐波(如5.5倍频扰动)。
5. Simulink仿真
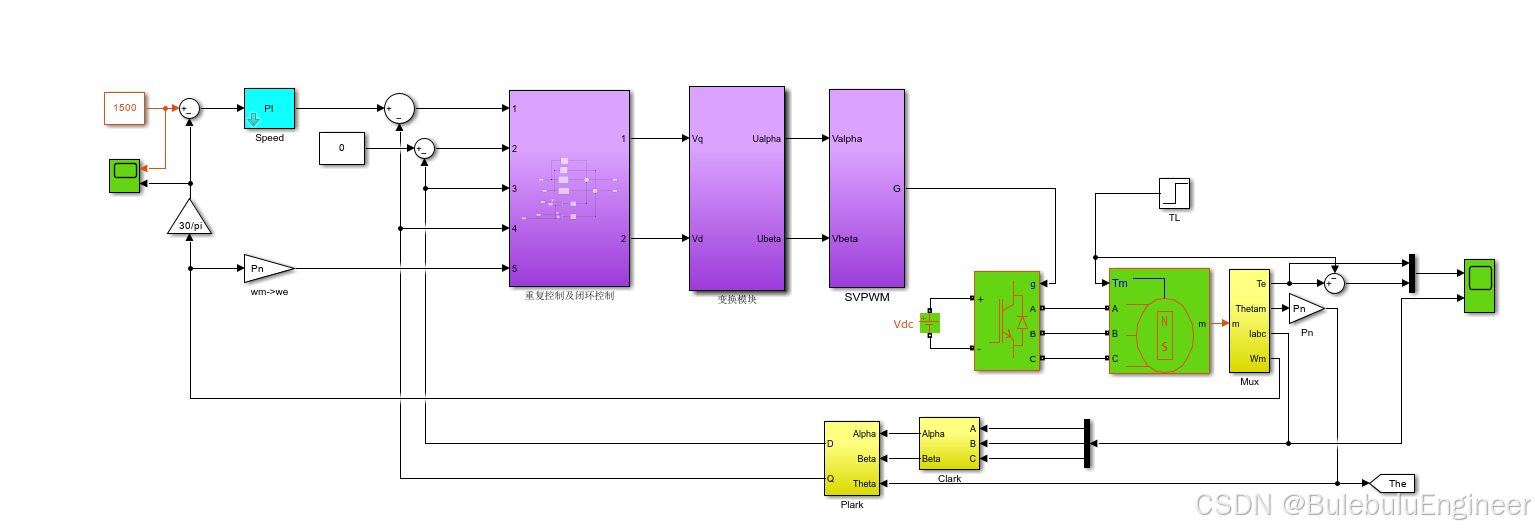
仿真模型
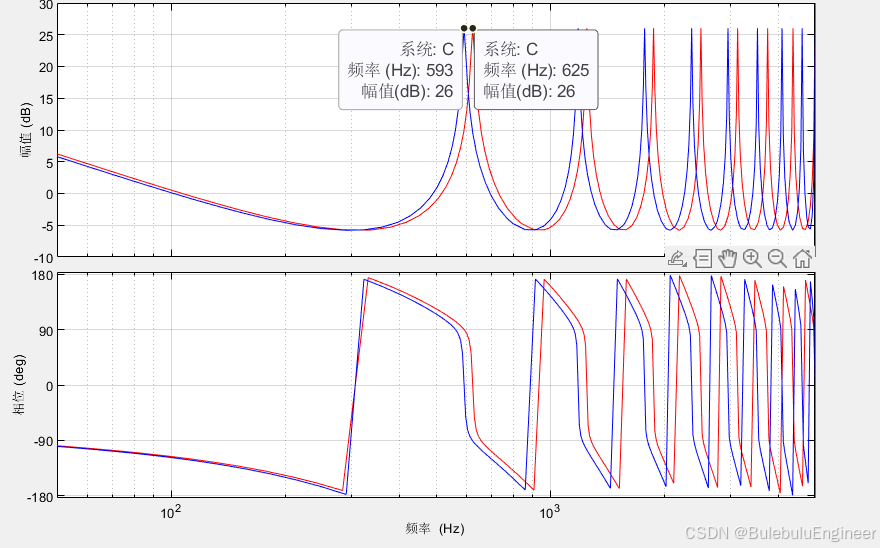
分数阶重复控制器伯德图
仿真结果
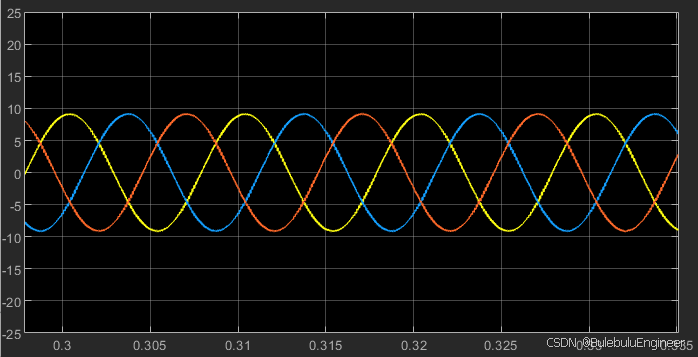
电机三相电流

转矩六倍频脉动抑制明显
仅做成果展示