FreeRTOS学习笔记——移植说明、任务创建
由于静态创建使用不多,先学习动态创建。
使用的开发板为WCH的CH32V307开发板,其提供的工程中存在FreeRTOS工程,已经移植好。
一、移植源码
FreeRTOS移植已经有很多教程,这里仅说明移植关键点。
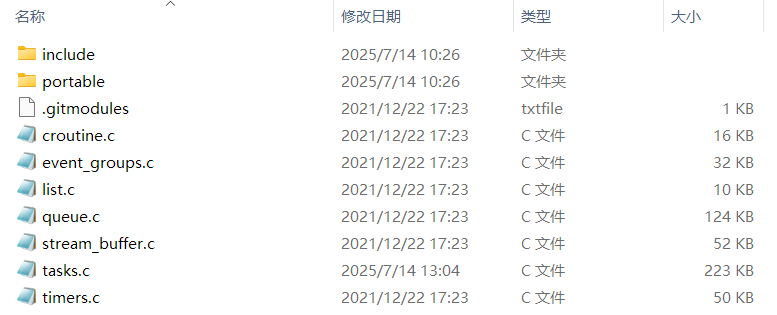
- 从官网下载源码之后,创建的FreeRTOS文件夹中,包含以下几个文件和文件夹。其中include和.c文件,为rtos基本的功能,一般无需修改。
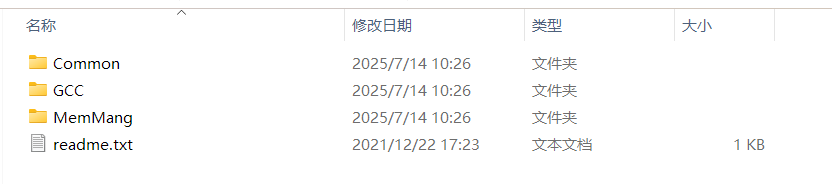
- portable包含如下三个文件夹,是删掉其他文件夹留下的。
Common和MemMang是通用的,一般不需要修改,MenMang中仅包含heap_4.c文件。
GCC文件夹则是编译方式决定的,里面有一个RISC-V文件夹。如果是Keil开发,应该留下Keil文件夹。
- 除了上述三个,额外的还需要移植FreeRTOSConfig.h,复制到user文件夹即可。
二、补充和修改必要函数
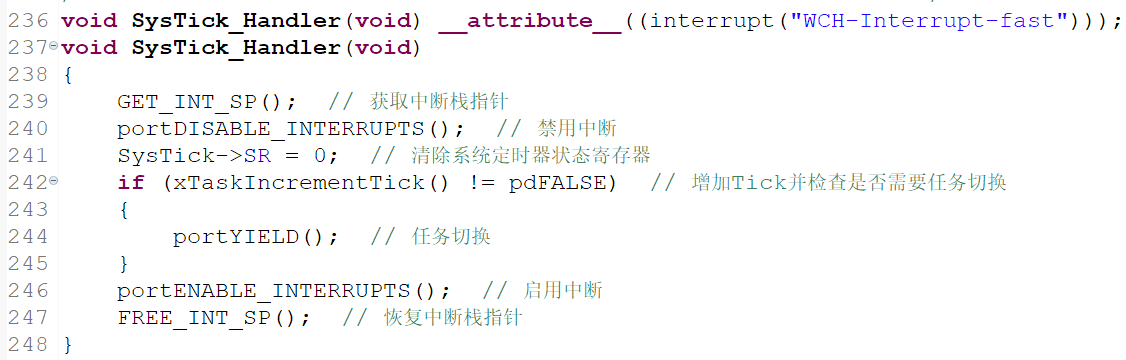
- 周期中断切换任务:对于FreeRTOS,其任务切换在周期中断中完成。在CH32工程中,代码在port.c中,如下,完成portYIELD(); // 任务切换即可。
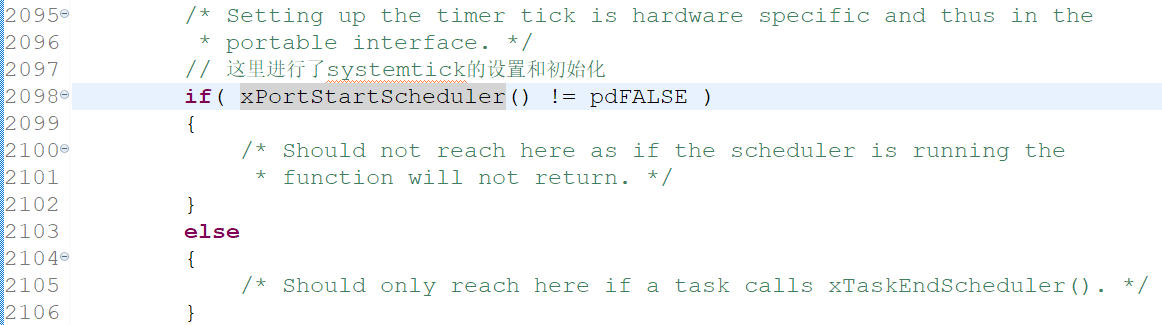
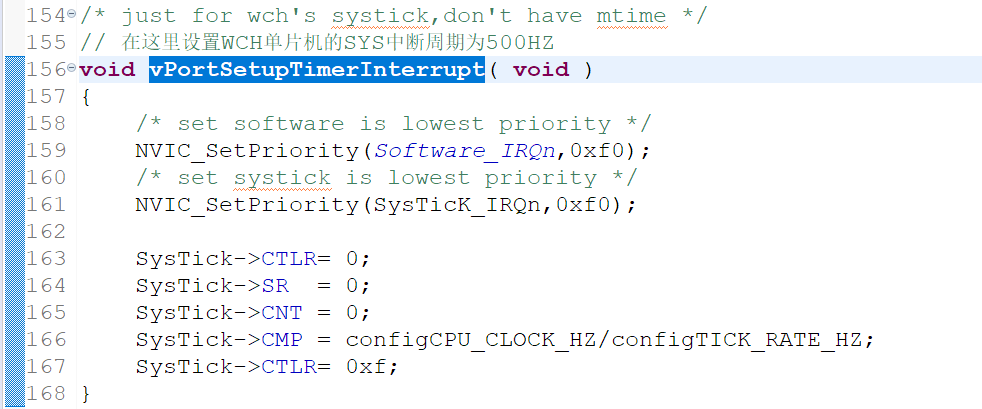
- 对于系统时钟,需要初始化,按照FreeRTOSConfig.h中的configTICK_RATE_HZ进行周期中断。初始化并没有在main中明示,而是在vTaskStartScheduler();中,进行初始化。如下:
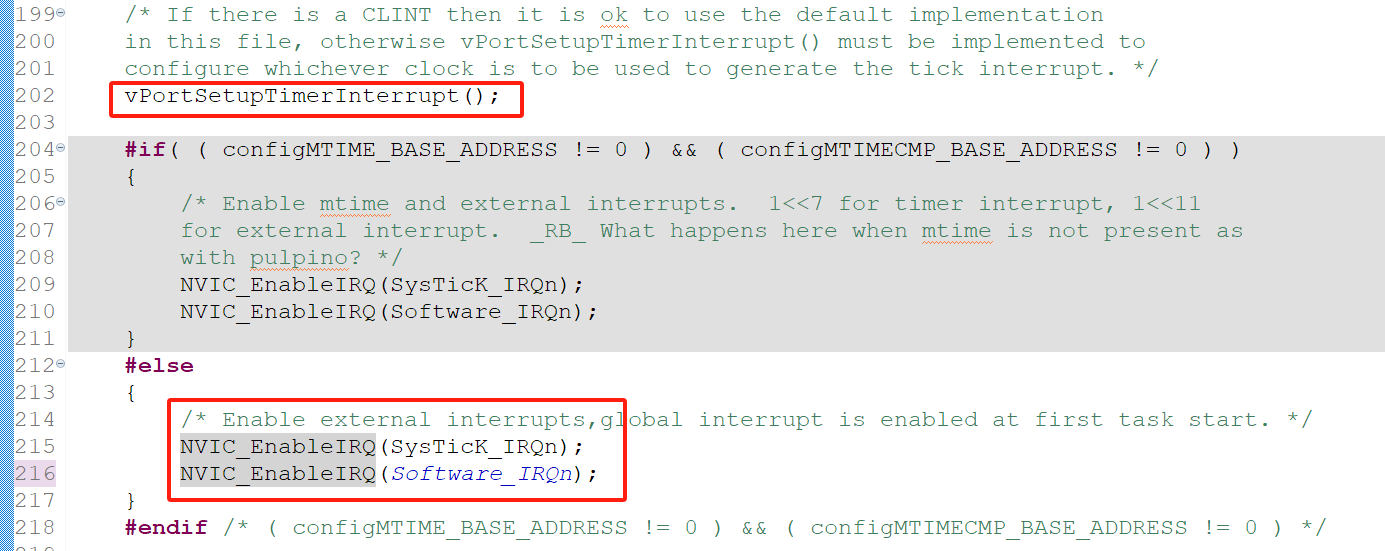
- 其他包含中断相关的代码,如下,同样放在port.c的最下面。
/*-----------------------------------------------------------*/
void vPortEnterCritical(void)
{portDISABLE_INTERRUPTS(); // 禁用中断uxCriticalNesting++; // 临界区嵌套计数增加
}/*-----------------------------------------------------------*/
void vPortExitCritical(void)
{configASSERT(uxCriticalNesting); // 断言临界区嵌套计数大于0uxCriticalNesting--; // 临界区嵌套计数减少if (uxCriticalNesting == 0){portENABLE_INTERRUPTS(); // 恢复中断}
}/*-----------------------------------------------------------*/
portUBASE_TYPE xPortSetInterruptMask(void)
{portUBASE_TYPE uvalue=0;__asm volatile("csrrw %0, mstatus, %1":"=r"(uvalue):"r"(0x7800));return uvalue;
}/*-----------------------------------------------------------*/
void vPortClearInterruptMask(portUBASE_TYPE uvalue)
{__asm volatile("csrw mstatus, %0"::"r"(uvalue));
}- 问题:发现中断中还包括了Software_IRQn,这是因为portYIELD()就是创建一个软件触发的中断,防止因阻塞 SysTick 定时器的中断而导致系统出错。
#define portYIELD() NVIC_SetPendingIRQ(Software_IRQn)
三、config配置
直接参考下面的代码,按需要启用
#ifndef FREERTOS_CONFIG_H
#define FREERTOS_CONFIG_H
#include "debug.h"/* don't have MTIME */
#define configMTIME_BASE_ADDRESS ( 0 ) // MTIME寄存器的基地址,通常用于配置定时器(如果硬件平台没有此寄存器,值可设为0)
#define configMTIMECMP_BASE_ADDRESS ( 0 ) // MTIMECMP寄存器的基地址,通常用于设置定时器的比较值(如果硬件平台没有此寄存器,值可设为0)#define configUSE_PREEMPTION 1 // 启用抢占式调度:1表示启用,0表示禁用
#define configUSE_IDLE_HOOK 0 // 是否使用空闲钩子函数:0表示不使用,1表示使用
#define configUSE_TICK_HOOK 0 // 是否使用Tick钩子函数:0表示不使用,1表示使用
#define configCPU_CLOCK_HZ SystemCoreClock // CPU时钟频率,通常设置为系统时钟频率
#define configTICK_RATE_HZ ( ( TickType_t ) 500 ) // 操作系统Tick中断的频率(500次/秒)
#define configMAX_PRIORITIES ( 15 ) // 系统支持的最大优先级数(0表示最高优先级,最大为15)
#define configMINIMAL_STACK_SIZE ( ( unsigned short ) 256 ) // 每个任务的最小栈大小,单位为字节(通常根据任务的复杂度调整)
#define configTOTAL_HEAP_SIZE ( ( size_t ) ( 12 * 1024 ) ) // 系统总堆内存大小,单位为字节
#define configMAX_TASK_NAME_LEN ( 16 ) // 最大任务名长度,任务名最长可为16个字符
#define configUSE_TRACE_FACILITY 0 // 是否启用跟踪功能:0表示不启用,1表示启用
#define configUSE_16_BIT_TICKS 0 // 是否使用16位Tick计数:0表示不使用,1表示使用(通常设置为0)
#define configIDLE_SHOULD_YIELD 0 // 空闲任务是否应放弃CPU:0表示不放弃,1表示放弃(通常设置为0)
#define configUSE_MUTEXES 1 // 是否使用互斥量:0表示不使用,1表示使用
#define configQUEUE_REGISTRY_SIZE 8 // 队列注册表的大小,用于跟踪创建的队列数,默认为8
#define configCHECK_FOR_STACK_OVERFLOW 0 // 是否检查任务栈溢出:0表示不检查,1表示检查
#define configUSE_RECURSIVE_MUTEXES 1 // 是否支持递归互斥量:0表示不支持,1表示支持
#define configUSE_MALLOC_FAILED_HOOK 0 // 是否启用内存分配失败钩子函数:0表示不启用,1表示启用
#define configUSE_APPLICATION_TASK_TAG 0 // 是否为每个任务分配标签:0表示不分配,1表示分配
#define configUSE_COUNTING_SEMAPHORES 1 // 是否使用计数信号量:0表示不使用,1表示使用
#define configGENERATE_RUN_TIME_STATS 0 // 是否生成运行时间统计数据:0表示不生成,1表示生成
#define configUSE_PORT_OPTIMISED_TASK_SELECTION 0 // 是否使用优化的任务选择方式:0表示不优化,1表示优化/* Co-routine definitions. */
#define configUSE_CO_ROUTINES 0 // 是否启用协程:0表示不启用,1表示启用(协程适用于轻量级任务调度)
#define configMAX_CO_ROUTINE_PRIORITIES ( 2 ) // 最大协程优先级:设置协程的最大优先级数,通常为2或更低/* 软件定时器定义 */
#define configUSE_TIMERS 1 // 是否启用软件定时器:0表示不启用,1表示启用
#define configTIMER_TASK_PRIORITY ( configMAX_PRIORITIES - 1 ) // 定时器任务的优先级,通常设置为最大优先级减1
#define configTIMER_QUEUE_LENGTH 4 // 定时器队列的长度,用于存储定时器任务(默认设置为4)
#define configTIMER_TASK_STACK_DEPTH ( configMINIMAL_STACK_SIZE ) // 定时器任务的栈深度,通常设置为最小栈大小/* Set the following definitions to 1 to include the API function, or zero
to exclude the API function. */
#define INCLUDE_vTaskPrioritySet 1 // 是否包含任务优先级设置函数vTaskPrioritySet:1表示包含,0表示不包含
#define INCLUDE_uxTaskPriorityGet 1 // 是否包含获取任务优先级函数uxTaskPriorityGet:1表示包含,0表示不包含
#define INCLUDE_vTaskDelete 1 // 是否包含删除任务函数vTaskDelete:1表示包含,0表示不包含
#define INCLUDE_vTaskCleanUpResources 1 // 是否包含清理任务资源函数vTaskCleanUpResources:1表示包含,0表示不包含
#define INCLUDE_vTaskSuspend 1 // 是否包含挂起任务函数vTaskSuspend:1表示包含,0表示不包含
#define INCLUDE_vTaskDelayUntil 1 // 是否包含延迟直到某一时刻函数vTaskDelayUntil:1表示包含,0表示不包含
#define INCLUDE_vTaskDelay 1 // 是否包含延迟任务函数vTaskDelay:1表示包含,0表示不包含
#define INCLUDE_eTaskGetState 1 // 是否包含获取任务状态函数eTaskGetState:1表示包含,0表示不包含
#define INCLUDE_xTimerPendFunctionCall 1 // 是否包含挂起定时器函数xTimerPendFunctionCall:1表示包含,0表示不包含
#define INCLUDE_xTaskAbortDelay 1 // 是否包含中止任务延迟函数xTaskAbortDelay:1表示包含,0表示不包含
#define INCLUDE_xTaskGetHandle 1 // 是否包含获取任务句柄函数xTaskGetHandle:1表示包含,0表示不包含
#define INCLUDE_xSemaphoreGetMutexHolder 1 // 是否包含获取互斥量持有者函数xSemaphoreGetMutexHolder:1表示包含,0表示不包含/* Normal assert() semantics without relying on the provision of an assert.h header file. */
#define configASSERT( x ) if( ( x ) == 0 ) { taskDISABLE_INTERRUPTS(); printf("err at line %d of file \"%s\". \r\n ",__LINE__,__FILE__); while(1); }
// 断言宏:如果条件x为0,则禁用中断,并打印错误信息(包括出错的行号和文件名),然后进入死循环。
// 这种方式的断言实现不依赖于assert.h头文件,适用于FreeRTOS等嵌入式系统。/* Map to the platform printf function. */
#define configPRINT_STRING( pcString ) printf( pcString )
// 定义平台上的printf函数:将FreeRTOS中的打印函数映射到具体平台的printf函数。
// 该宏用于打印字符串(pcString),在嵌入式系统中通常会映射到系统的标准输出。#endif /* FREERTOS_CONFIG_H */三、任务创建
- 任务创建因素:对于简单任务,需要的提前创建的包括 函数task1_task,优先级TASK1_TASK_PRIO,句柄Task1Task_Handler。对于TASK1_STK_SIZE,可以默认为256等基本的,不用多考虑。
xTaskCreate((TaskFunction_t )task1_task,(const char* )"task1",(uint16_t )TASK1_STK_SIZE,(void* )NULL,(UBaseType_t )TASK1_TASK_PRIO,(TaskHandle_t* )&Task1Task_Handler);
- 任务的可通过挂起、恢复、删除方式对任务的运行进行操作。例如如下按键任务,操作led开关任务的挂起和恢复
void taskkey_task()
{uint8_t tres = 1;static uint8_t mode = 0;while(1){if(0 == GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_2)){taskENTER_CRITICAL();vTaskDelay(10);if(0 == GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_2)){if(0==mode){mode = 1;vTaskSuspend(Task1Task_Handler);printf("Task1 suspend\r\n");}else {mode = 0;vTaskResume(Task1Task_Handler);printf("Task1 resume\r\n");}}while(0==GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_2)){vTaskDelay(20);}taskEXIT_CRITICAL();}vTaskDelay(20);}
}