IDE/IoT/实践小熊派LiteOS工程配置、编译、烧录、调试(基于 bearpi-iot_std_liteos 源码)
文章目录
- 概述
- 实验准备
- 参考资料说明
- 示例程序下载
- LiteOS Studio
- IDE依赖包(bearpi提供)
- GitBash
- OpenOCD
- GNU MCU Eclipse / make 构建工具
- DFP 软件包/芯片驱动/BSP代码
- GNU Tools Arm Embedded / 交叉编译工具链
- ST-LINK_Utility
- 环境变量
- 软件项目配置
- menuconfig 配置
- genconfig 生成头文件
- STM32CubeMX-xxx.s 启动文件
- LiteOS 接管中断管理
- 软件编译
- 软件烧录
- 软件调试
- 运行测试
概述
本文基于小熊派社区提供的源码和简要集成开发环境搭建说明,实践 LiteOS 物联网端侧应用程序的工程配置、编译、烧录和调试。相较基于 LiteOS Studio 或 VSCode IoTLink 插件搭建的IDE,其不再受限仅能使用旧版本VSCode及其插件,也不只局限于针对LiteOS的开发。本文内容涉及VSCode、Cortex-Debug、GCC工具链、JLink调试工具、menuconfig、genconfig等使用方法说明。
@HISTORY
在小熊派开发板上烧录的第一个程序,是按照小熊派社区提供的IDE来搞的。后来在前几个HCIP实验操作中,我使用的是 LiteOS Stduio 开发环境,后来使用的是 VSCode + GitBash + GCC + Cortex-debug 集成开发环境方案,小熊派提供的依赖包也不稀用了。
实验准备
BearPi-IoT_Std开发板针对不同需求的开发者,提供了使用GCC编译和MDK编译的两种开发方式,也不单单可以对接华为云平台。针对华为云,其并没有使用 LiteOS Studio 或 VSCode IoTLink 插件,而仅使用华为云物联网SDK库 。
参考资料说明
参照1: 小熊派IoT开发板社区帮助文档中提及的IDE搭建过程,软件 -> 十分钟上手教程(GCC)。
参考2:小熊派-物联网·仲 -> Codelabs -> 基于NB-IoT的智慧路灯案例。
参考3:GitEE 小熊派开源社区/BearPi-IoT_Std_LiteOS 帮助文档。
如上几个参照都是小熊派社区中给出的,第1个参照中的Demo,关于环境搭建过程是更详细的,但源码案例是不带LiteOS的。第2个参照中,关于环境搭建过程的描述相对简单,其源码案例是带LiteOS、带IoTDA云端产品、模型、设备配置说明的。两个参照请结合者使用。
示例程序下载
小熊派-物联网·仲 -> 软件 -> 连接物联网平台开发教程 -> 华为云平台的智慧路灯案例,或者小熊派-物联网·仲 -> Codelabs -> 基于NB-IoT的智慧路灯案例,中提及的 BearPi-IoT_Std_LiteOS 源码,GitEE下载地址 ,压缩文件217M大小,

学习外设操作时,可用 BearPi-IoT_Std(不带LiteOS) 开发板案例代码,GitEE地址,

LiteOS Studio
小熊派示例程序可以在多个IDE完成编译和调试,包括 LiteOS Studio 集成开发环境。在 #<IDE/IoT/搭建物联网(LiteOS)集成开发环境,基于 LiteOS Studio + GCC + JLink># 这篇文章中,我最初使用的是小熊派社区的(bearpi-iot_std_liteos-master)示例程序,而不是华为云HCP-IOT提供的 LiteOS_Lab_HCIP 示例程序。眼尖的我发现,在 bearpi-iot_std_liteos-master.vscode 目录下是存在 launch.json 运行调试配置文件的,某配置下的内容可能如下,
{"version": "0.2.0","configurations": [{"name": "Jlink Debug","cwd": "${workspaceRoot}","request": "launch","type": "liteos-studio-debug","servertype": "jlink","device": "STM32L431RC","showDisassemble": true,"interface": "swd","postLaunchCommands": ["delete","b main","monitor reset halt","continue"]}]
}
用 LiteOS Studio 打开 bearpi-iot_std_liteos-master 项目文件夹,并执行目标板卡、编辑器、烧录器等工程配置后,就会生成一套相对完整的 launch.json + settings.json 文件。其实,不光是小熊派的源码,任何在VSCode下打开的工程,都可以。我们关注Makefile类型。
IDE依赖包(bearpi提供)
参照小熊派社区提供的说明,下载 developTools.zip ,解压并运行 developTools.exe,按提示安装。后文会详解这个依赖包内容。

依赖包安装过程,首先是拷贝,可见 developTools 目录中的内容如下,
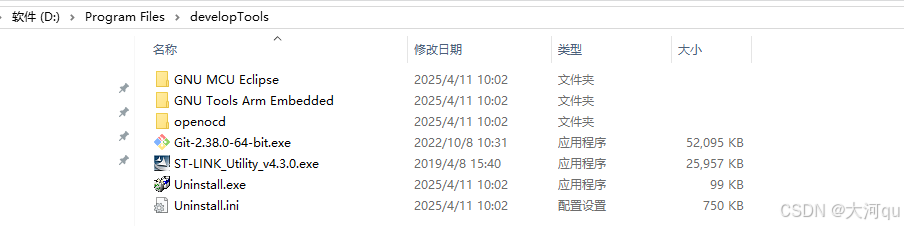
除了拷贝上述如交叉编译工具链等,还会触发安装 STM32 ST-LINK Utility、Git 2.38.0 等驱动或工具,

GitBash

Git Bash 能支持代码管理,并不是此处选择它的原因。我们看中的是,GitBash 支持大部分Linux命令,可直接运行为Linux设计的Makefile脚本,使得我们可以在Windows上基于GCC工具链编译Makefile的工程。而cmd和PowerShell本身无法直接解析Makefile文件。
OpenOCD
OpenOCD 是一款开源的调试软件,提供 GDB 服务器、Flash 编程、边界扫描等功能,需依赖硬件调试器(如 ST-Link、J-Link)与目标芯片通信。 ST-Link、J-Link 是物理调试器硬件,负责将 USB 信号转换为 JTAG/SWD 协议信号,直接连接目标设备。STM32系列微控制器内部对 JTAG/SWD 调试协议的支持是硬件集成的,属于芯片设计中的固有功能模块。

以STLink为例,
OpenOCD 需加载 interface/stlink.cfg 配置文件,通过调试器硬件与目标芯片交互。OpenOCD 启动后作为 GDB 服务器,开发者通过 GDB 客户端(如 arm-none-eabi-gdb)发送调试命令,硬件调试器负责信号传输。不同的开发环境,可以依赖相同的调试硬件,但调试机制却不同。这也最可能是我STLInk使用失败的原因,即配置不合理。
STM32CubeIDE 明确依赖 GDB 客户端-服务器架构,而 Keil MDK 则采用专有调试引擎,不直接依赖 GDB 服务器。

STM32CubeIDE 默认使用 OpenOCD 作为调试后端,OpenOCD 充当 GDB 服务器,负责与 ST-Link 硬件通信,翻译调试指令为 SWD/JTAG 协议。用户通过 IDE 集成的 GDB 客户端(如 arm-none-eabi-gdb)发送命令,OpenOCD(GDB服务)转发至 ST-Link,最终操作目标 MCU。
Keil 的 µVision 调试器通过 ULink 协议簇(专有协议)直接与 ST-Link 通信,无需 GDB 服务器中介。其内置的调试引擎直接解析用户操作(如断点设置),并转换为 SWD/JTAG 信号。Keil 支持 CoreSight 技术,通过硬件单元(如 ETM)实现非侵入式追踪,此类功能由调试器直接控制,不依赖 GDB 协议。专有协议减少协议转换开销,适合实时调试。直接支持 SWV(Serial Wire Viewer)、RTOS 线程感知等高级功能,无需额外配置。
GNU MCU Eclipse / make 构建工具
是一款基于 Eclipse IDE 的插件套件,专为嵌入式系统开发设计,支持 ARM Cortex-M/R/A 和 RISC-V 等架构的微控制器(MCU)开发。它通过整合开源工具链、调试工具和硬件支持包,为开发者提供了跨平台的嵌入式开发环境,尤其适用于对成本敏感或需要灵活配置的项目。以下是其核心特性与技术解析,
多架构支持 #原生支持 ARM Cortex-M(如STM32系列)、Cortex-R/A 及 RISC-V 架构,覆盖主流嵌入式芯片,如STM32F1/F4、GD32、ESP32等。提供预配置的工程模板,支持不同厂商的硬件抽象层(HAL)和启动文件生成。
工具链整合 #集成 GNU Arm Embedded Toolchain(GCC编译器)和 OpenOCD(调试与烧录工具),支持源码级调试、Flash编程及JTAG/SWD接口通信 。内置 Windows Build Tools(含GNU Make和BusyBox),弥补Windows环境下Linux命令缺失的问题。
硬件支持扩展 #通过 CMSIS Packs 管理芯片厂商的驱动库(如STM32Cube HAL),自动适配不同MCU的外设配置。支持 ST-Link、J-Link 等调试器,以及 QEMU 模拟器用于无硬件开发测试。

虽然上述套件功能挺多的,但在小熊派提出的这个IDE中,似乎仅仅就是使用了其make工具。这里的make工具也可以直接使用mingw中的make工具,比如Qt安装目录下的,一些大牛就是这么干的,我也实际测试了下,没有问题。
DFP 软件包/芯片驱动/BSP代码
我有一个问题,
Keil下需要安装的那些pack,与芯片相关的驱动等,在GCC+VSCode下如何获取或构建?
DFP(Device Family Pack)本质,是半封闭的硬件支持包,提供预编译的启动代码、闭源驱动库,但包含开源的寄存器定义和链接脚本。与之类似的概念是BSP代码,即板级支持包(Board Support Package)相关的硬件驱动和初始化代码,也即硬件主板与操作系统或用户代码之间的适配层。在Keil开发环境下,我们要安装pack软件包,如DFP,之后才能进行后续编译过程,

继续讨论前,我们必须先看看DFP的内容包含哪些?大致哈,大致如下,可能并不精准,

在了解上述pack的大致内容后,结合自己近来对STM32CubeMX工具的使用经验(也有类似pack配置的过程),若有所思。
当我们在MX中生成MDK工程时,确实是有Pack处理的,MX会在.uvprojx中写入Pack依赖项(如<Package=“Keil.STM32F4xx_DFP” Version=“2.15.0”/>),Keil打开工程时自动安装缺失Pack。CubeMX生成的Makefile不包含Pack引用,所有必需文件(启动代码、HAL库)均以源码形式提供,这些源码MX会替你、替你、替你生成。以下是MX新建的一个GCC类型的工程,

GNU Tools Arm Embedded / 交叉编译工具链
GNU ARM嵌入式工具链(也称为 GNU Arm Embedded Toolchain 或 arm-none-eabi-gcc),专为 ARM Cortex-M/R 系列微控制器(无操作系统/RTOS)开发设计。基于GCC(GNU Compiler Collection)构建,遵循GPL协议,完全免费。支持 Windows、Linux、macOS 全平台兼容。其在代码优化效率方面略逊于Keil/IAR等商业工具链,但相比于其优点,大多时候这可以忽略。

工具链协作,

如上,在GNU ARM嵌入式工具链中,.c文件通过arm-none-eabi-gcc编译为目标文件的过程实际隐含了预处理和汇编阶段,但开发者通常无需手动调用独立工具。当执行arm-none-eabi-gcc -c main.c -o main.o时,GCC内部自动按以下顺序处理:
关于GCC ARM,后期会单独发布一篇文章,这里不再多说。ST 官方提供的命令行工具包(STM32Cube Command-Line Tools),包含预配置的 ARM GCC 编译器(gcc-arm-none-eabi)、CMake、OpenOCD 等工具。 GNU Arm Embedded Toolchain Downloads,也可以直接下载 win32.zip 工具链版本。当然,去GUN官网探索一番也不错。
ST-LINK_Utility

ST-LINK Utility 是意法半导体(STMicroelectronics)为STM32系列微控制器开发的编程与调试工具,支持通过ST-LINK调试器实现代码烧录、芯片信息读取及调试功能。具体参见,ST逛网中的表述,这是个旧工具,ST不再维护它了,而是直接推荐STM32CubeProgrammer软件的使用。ST-LINK Utility / STM32CubeProgrammer 是STM32开发者不可或缺的工具,尤其适合量产烧录和快速调试。

@NOTE
小熊派IoT开发版,板载STLink(基于STM32F103)。为了迎合LiteOS Stduio的使用,前期我已经将其烧录成了JLink固件,可参见IOT专栏下相关文章,实践中确实比直接使用STLink顺心很多。在后文的实验中,针对小熊派开发板,我们也是把STLink当做JLink来使用,针对普通嵌入式板卡我们之间使用JLInk工具,且在实际工作中Jlink的调试性能表现也比STLink强很多。
环境变量
上述 developTools 安装过程在用户环境变量中增加了如下路径,

在系统环境变量中添加了如下路径,

要注意的是,上述安装过程增设的系统环境变量,可能会与某些之前安装软件,如Qt等,在环境变量设置上存在冲突。在 #<IDE/IoT/搭建STM32集成开发环境 / VSCode + GitBash + GCC + Cortex-debug 方案># 文中,我们会详细探讨此问题。
软件项目配置
前文我们已经搭建好了一个编译环境,接下来我们将尝试使用它编译不同类型的工程。如何配置小熊派源码工程是本章重点。
menuconfig 配置
//在Gitbash中执行以下指令,以启动配置工具
start menuconfig.exe
先前并没有正儿八经用过 menuconfig 工具,它是什么样子的,

实际上,menuconfig.exe 和 genconfig.exe 确实属于通用工具。 以下来自于网络,
menuconfig 是 Linux 内核、RT-Thread、鸿蒙、LiteOS等嵌入式操作系统常用的图形化配置工具,其核心基于 Kconfig 语法和 ncurses 库。它通过读取 Kconfig 文件生成菜单界面,允许用户对内核模块、驱动、软件包等进行裁剪和配置,最终生成 .config 文件指导编译流程 。而 genconfig 通常用于将用户通过 menuconfig 选择的配置项(保存在 .config 中)转换为具体的编译宏定义(如 autoconfig.h)。
我现在没有时间去探究什么 Kconfig 语法,只能留给以后。总之如上两个工具可以自动化配置我们的Demo工程。如上图,使用合适的操作,选择我们本次要实验的SC1智慧路灯工程。

我们可以通过 menuconfig 工具来生成 .config 文件,但这需要一个细致的配置过程。在源码 …\targets\STM32L431_BearPi\Demos\oc_nb_lwm2m_light 下存在一个已经精确配置好的 defaults.sdkconfig 文件,其与 menuconfig 粗配置生成的文件,对比如下,

我们这里参照 基于NB-IoT的智慧路灯案例 中的说明,拷贝已有配置文件,
cp Demos/oc_nb_lwm2m_light/defaults.sdkconfig .config
@NOTE
HCIP实验手册中提及的 HCIP_LiteOS_LAB 示例程序,其项目原始配置文件应该是使用menuconfig、genconfig等工具生成的,但为了更好的贴合 LiteOS Stuido 的使用,这些文件有所改动。我尝试使用上述工具解析配置它,并没有成功,可能需要基于KConfig做修正。
genconfig 生成头文件
start genconfig.exe
前文提过, genconfig 用于将用户通过 menuconfig 选择的配置项(保存在 .config 中)转换为具体的编译宏定义,这里生成的是 config.h 文件。关于 menuconfig 和 genconfig 的使用,以后再谈。
STM32CubeMX-xxx.s 启动文件
使用MX新建的GCC工程,与MDK Keil工程类型一致,也有"标准的"启动文件,我是有点小欢喜的。之前我一直以为小熊派给出的示例程序中,是使用了标准启动文件的,因为我曾经在示例源码中搜到过。但实际上并不是想象的那样美好,小熊派的示例程序,并没有像上文 MX-GCC 工程那样,存在一个startup_stm32f427xx.s启动文件。
接下来我把自己扔进了一个更大的坑里,并且截止本文发稿,哈哈,一直没有爬出来,
#<IDE/基于STM32的程序在MDK Keil下的启动过程和中断管理分析>#
#<IDE/基于STM32的程序在GCC工具链下的启动过程和中断管理分析>#
#<IDE/华为云物联网操作系统LiteOS如何接管STM32硬件中断管理?>#
尽管截止到此刻,上述几个文章都还没有整理完成,我还有一堆为什么在脑海里,窝成一团。我目前搞明白的仅仅是:
1、针对STM32F427ZIT6芯片在MDK-Keil和GCC工具链下的startup_stm32f427xx.s启动文件差异,其根本原因在于汇编语法规范、工具链工作流程及初始化机制的不同。具体的不同,这里就不展开啦,可能需要很强的汇编知识基础和嵌入式ARM架构知识才能看懂吧。
2、STM32启动文件是芯片上电后执行的首个程序,负责初始化微控制器的底层环境并引导至 main() 函数。其核心功能,

3、启动文件是作为源文件(ASM汇编)参与编译过程的。打开MX-Makefile文件,可以看到有如下语句和启动文件相关,
# ASM sources
ASM_SOURCES = \
startup_stm32f427xx.s# ASM sources
ASMM_SOURCES =
....
在 Makefile 中,变量名 ASM_SOURCES 中的 ASM 是 Assembler(汇编器)或 Assembly(汇编语言)的缩写。

启动文件是ASM汇编文件,也算是一种代码级别的东东,也要参与编译过程,生成目标文件,其通过汇编器直接生成为.o文件。
LiteOS 接管中断管理
前文提到,即使是小熊派的源码程序,也没有使用标准的启动文件。这是为啥呢?
其实,LiteOS 有两种移植方案,OS接管中断和非接管中断方式。接管中断的方式,是由LiteOS创建和管理大部分中断,需要修改stm32启动文件,移植比较复杂。小熊派的示例工程中,使用的就是后边这种难的,当然这是更使用于物联网应用场景的。我个人感觉,随着CubeMX兴起,LiteOS非接管中断方式,可能会是主流移植方式,以后新建自己的工程,我也大概率会使用LiteOS非接管中断方式移植模式。

最近时间略紧张,再加上自身基础知识有限,暂时不去研究 “LiteOS 是如何接管 STM32 硬件中断管理” 这个问题了。
软件编译
这里的make和gcc的执行都是依赖于系统环境变量配置的,在其他文章中会继续探讨不依赖系统环境变量的方案。
$ make clean
$ make -j8
我们使用VSCode打开,小熊派社区示例程序 bearpi-iot_std_liteos-master\targets\STM32L431_BearPi 文件夹,

Makefile工程文件就在此文件夹下,通过menuconfig工具设置工程为智慧路灯项目。
图省事的话,你可直接从 …\targets\STM32L431_BearPi\Demos\oc_nb_lwm2m_light 下复制默认文件去覆盖 .config 内容。还要记住的是,不是拷贝过去就万事大吉了哈,还要调用 genconfig 生成更新 iot_config.h 头文件,否则编译失败哈。

若VSCode打开的不是Makefile所在的路径,则编译时需要cd到Makefile路径之下,再进行编译。编译结果如下,

软件烧录
烧录前,先将小熊派开发板通过USB线与电脑连接。执行如下烧录指令,
$ make download
make download 指令是如何知道我使用了怎样的调试器或者调试协议的呢?
#######################################
# download
#######################################
OPENOCD_INTERFACE = stlink-v2-1.cfg
OPENOCD_TARGET = stm32l4x.cfg
OPENOCD_FLASH_START = 0x08000000
download:openocd -f $(SDK_DIR)/tools/openocd/$(OPENOCD_INTERFACE) -f $(SDK_DIR)/tools/openocd/$(OPENOCD_TARGET) -c init -c targets -c "reset halt" -c "flash write_image erase ./$(BUILD_DIR)/$(TARGET).bin 0x08000000" -c "verify_image ./$(BUILD_DIR)/$(TARGET).bin 0x08000000 bin" -c "reset run" -c shutdown
而如果使用JLink调试器(或STLink硬刷出来的JLink),配置会更简单些,注释掉上述配置,更换如下配置,
#######################################
# download 大河.qu
#######################################
# 添加烧录工具路径(根据实际安装位置调整)
JLINK_EXE ?= "C:\\Program Files (x86)\\SEGGER\JLink\\JLink.exe"
# 定义烧录目标
download:$(JLINK_EXE) -device STM32L431RC -if SWD -speed 4000 -CommanderScript ./flash.jlink
flash.jlink 文件,新建在Makefile所在目录下,内容如下,
halt // 暂停 CPU
erase // 全擦除
//加载bin/hex到指定的地址
loadfile ./build/Huawei_LiteOS.bin 0x08000000
r // 复位芯片
sleep 10 // 延时确保复位稳定 /可能不需要
g // 运行程序
exit // 退出
下载完成,示例图,

软件调试
参见 #<IDE/基于VSCode搭建STM32集成开发环境 / Cortex-debug插件工作原理和使用方法(含3种JLink烧录方案)># ,理解 Cortex-Debug 插件使用方法。
在使用 LiteOS Studio 进行调试时,调试器类型为 liteos-studio-debug,要修改 launch.json 文件,替换为 cortex-debug。
配置 settings.json 也要进行修改,且不建议使用小熊派社区提供的工具链依赖包。具体参考,
#<IDE/IoT/搭建STM32集成开发环境 / VSCode + GitBash + GCC + Cortex-debug 方案>#
要配合 Cortex-Debug使用的话,小熊派提供的IDE依赖包,版本有点低,

需要更换较新版本低gdb客户端,如…gcc-arm-none-eabi-10.3\bin\arm-none-eabi-gdb.exe,进入调试,

运行测试
参见 #<IDE/基于STM32CubeMX构建Makefile工程,并实践工程配置、管脚配置、程序编译># ,理解 GCC 工具链下的 printf 输出重定向到指定串口。示例程序已实现了 printf的重定向,在 …\targets\STM32L431_BearPi\Src\uart_debug.c 文件中,
__attribute__((used)) int _write(int fd, char *ptr, int len)
{if(s_uart_init) {HAL_UART_Transmit(&uart_debug, (uint8_t *)ptr, len, 0xFFFF);}return len;
}
__attribute__((used)) int _read(int fd, char *ptr, int len)
{int ret = 0;unsigned char value;do {if(LOS_OK == LOS_SemPend(s_uartdebug_rcv_sync,LOS_WAIT_FOREVER)){ret = ring_buffer_read(&s_uartdebug_rcv_ring,&value,1);}} while(ret <=0);*(unsigned char *)ptr = value;return 1;
}
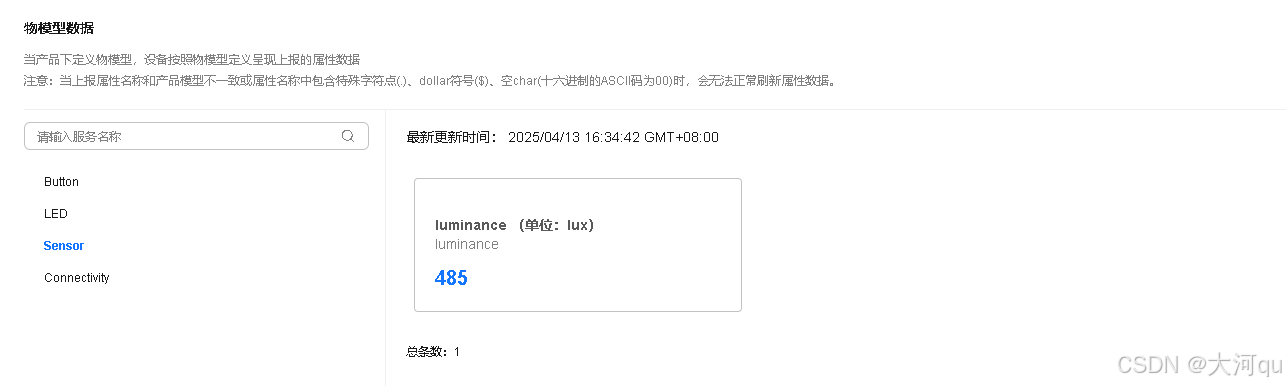
智慧路灯实验,平台侧结果显示,