遥控器主副控设计运行要点分析!
一、运行要点
1. 主副控协作模式
主控端:负责核心指令生成与决策,通常具备高算力模块。
副控端:作为冗余备份,实时监听主控状态,在主控失效时接管控制权(如通信超时或硬件故障)。
典型场景:工业起重机中,主控手持终端失效时,副控端自动接管,防止失控。
2. 通信协议选择
事件触发:主控仅在操作时发送指令,延迟低,但需ACK确认防丢包。
心跳轮询:主副控周期性互发状态,丢包后可快速恢复,但延迟较高。
混合方案:主控以事件触发为主,副控每隔1秒发送心跳检测连接存活,兼顾实时性与容错。
3. 状态同步机制
主副控需实时共享设备状态。
通过双向通信或共享内存实现状态同步,避免指令冲突。
4. 安全切换逻辑
超时判定:副控在连续3次未收到主控心跳时触发切换。
状态一致性检查:切换前校验设备最新状态,防止指令跳变
二、技术难点及解决方案
1. 通信可靠性
难点:无线信号易受干扰,导致指令丢失或误触发。
解决方案:
采用跳频技术或抗干扰编码。
添加冗余校验及重发机制。
2. 主副控指令冲突
难点:双端同时发送指令可能导致设备执行混乱。
解决方案:
令牌环机制:仅持有令牌的一端可发送指令。
时间窗口同步:主副控按固定时序分时发送。
3. 状态同步延迟
难点:副控状态滞后可能引发误操作。
解决方案:
增量同步:仅传输变化的状态值,减少数据量。
传感器直连副控:关键状态由副控直接监测。
4. 功耗与实时性平衡
难点:副控持续监听功耗高,但待机模式可能响应延迟。
解决方案:
分级唤醒:副控平时休眠,主控心跳信号作为唤醒触发。
动态频率调整:空闲时降低心跳频率,操作时升至50Hz。
三、运行方式详解
1. 初始化与配对
主控上电后广播设备ID,副控响应并交换密钥,建立安全链路。
同步初始状态。
2. 正常操作模式
主控主导:用户操作触发事件指令,主控发送指令至设备并同步至副控。
副控监听:持续校验主控心跳,记录设备状态。
3. 故障切换流程
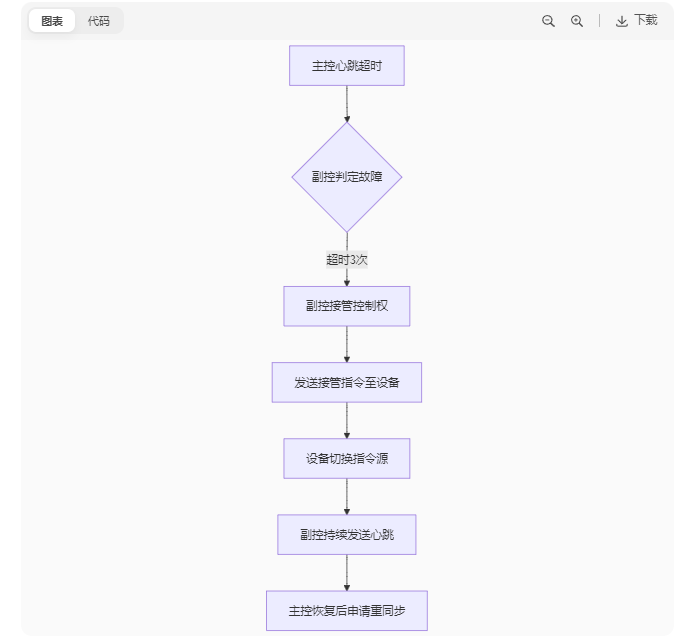
4. 恢复与重同步
主控恢复后发送同步请求,副控回传当前设备状态及历史指令队列。
主控校验一致性后,发送接管指令,副控退回监听模式。
总结
主副控设计的核心在于冗余与实时性的平衡:
工业场景优先可靠性,容忍毫秒级延迟;
消费电子侧重低功耗与用户体验,采用事件触发+星闪等新型技术;
技术难点需通过混合通信策略、冲突避让算法,动态功耗管理分级攻克
