算法分析·回溯法
回溯法
- 方法概述
- 算法框架
- 问题实例
- TSP 问题
- n皇后问题
- 回溯法效率分析
方法概述
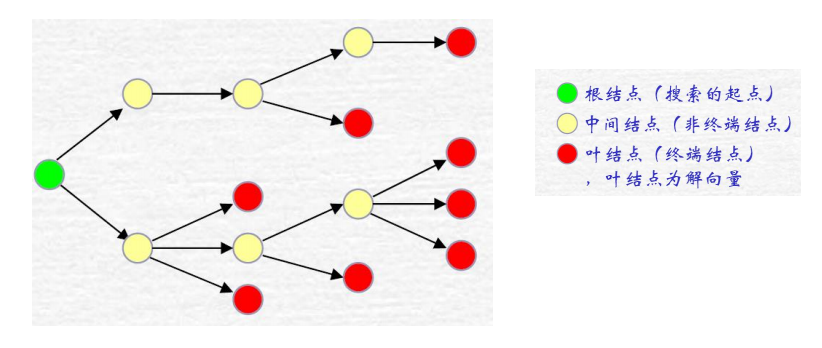
回溯法是一个既带有系统性又带有跳跃性的搜索算法;
- **系统性:**它在包含问题的所有解的解空间树中,按照深度优先的策略,从根结点出发搜索解空间树。
跳跃性:算法搜索至解空间树的任一结点时,判断该结点为根的子树是否包含问题的解,如果肯定不包含,则跳过以该结点为根的子树的搜索,逐层向其祖先结点回溯。否则,进入该子树,继续深度优先的策略进行搜索。
这种以深度优先的方式系统地搜索问题的解得算法称为回溯法,它适用于解一些组合数较大的问题。
- 问题的解向量:回溯法希望一个问题的解能表示成一个𝑛元组 ( 𝑥 1 , 𝑥 2 , … , 𝑥 𝑛 ) (𝑥_1, 𝑥_2, … , 𝑥_𝑛) (x1,x2,…,xn)的形式;
- 显约束:对分量 𝑥 𝑖 𝑥_𝑖 xi的取值限定;
- 隐约束:为满足问题的解而对不同分量之间施加的约束;
- 解空间:对于问题的一个实例,解向量满足显式约束条件的所有多元组, 构成了该实
例的一个解空间。
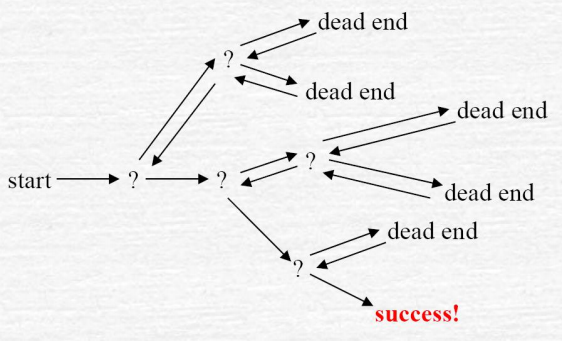
搜索从开始结点(根结点)出发,以深度优先搜索整个解空间。
这个开始结点成为活结点,同时也成为当前的扩展结点。在当前的扩展结点处,搜索向纵深方向移至一个新结点。这个新结点就成为新的活结点,并成为当前扩展结点。
如果在当前的扩展结点处不能再向纵深方向扩展,则当前扩展结点就成为死结点。
此时,应往回移动(回溯)至最近的一个活结点处,并使这个活结点成为当前的扩展结点;直到找到一个解或全部解。
基本步骤:
① 针对所给问题,定义问题的解空间;
② 确定易于搜索的解空间结构;
③ 以深度优先方式搜索解空间,并在搜索过程中用剪枝函数避免无效搜索。
常用剪枝函数:
① 用约束函数在扩展结点处剪去不满足约束的子树;
② 用限界函数剪去得不到最优解的子树。
二类常见的解空间树
① 子集树:当所给的问题是从𝑛个元素的集合𝑆中找出满足某种性质的子集时,相应的解空间树称为子集树。子集树通常有 2 𝑛 2^𝑛 2n个叶子结点,其总结点个数为 2 𝑛 + 1 − 1 2^{𝑛+1} − 1 2n+1−1,遍历子集树时间为 Ω ( 2 𝑛 ) Ω(2^𝑛) Ω(2n) 。如0-1背包问题,叶结点数为 2 𝑛 2^𝑛 2n,总结点数 2 𝑛 + 1 2^{𝑛+1} 2n+1;
② 排列树:当所给问题是确定𝑛个元素满足某种性质的排列时,相应的解空间树称为排列树。排列树通常有𝑛!个叶子结点,因此,遍历排列树需要 Ω ( 𝑛 ! ) Ω(𝑛!) Ω(n!)的计算时间。如TSP问题,叶结点数为𝑛!,遍历时间为 Ω ( 𝑛 ! ) Ω(𝑛!) Ω(n!)。
算法框架
回溯法对解空间作深度优先搜索,因此在一般情况下可用递归函数来实现回溯法:
子集树回溯算法的伪代码为:
Backtrack( int 𝑡 ) //搜索到树的第𝑡层
{ //由第𝑡层向第𝑡 + 1层扩展,确定𝑥[𝑡]的值if 𝑡 > 𝑛 then output( 𝑥 ); //叶子结点是可行解else while( all Xt) do //𝑋𝑡为当前扩展结点的所有可能取值集合{𝑿[𝑡] = 𝑋𝑡中的第𝑖个值;if( Constraint(𝑡) and Bound( 𝑡 ) ) Backtrack(𝑡 + 1);}
}
排列树回溯算法的伪代码为:
Backtrack( int 𝑡 ) //搜索到树的第𝑡层
{ //由第𝑡层向第𝑡 + 1层扩展,确定𝑥[𝑡]的值if 𝑡 > 𝑛 then output( 𝑥 ); //叶子结点是可行解else for i=t to n do{swap(X[t],X[i]);if( Constraint(𝑡) and Bound( 𝑡 ) ) Backtrack(𝑡 + 1);swap(X[t],X[i]);}
}
问题实例
TSP 问题
旅行商问题。
旅行商从起点出发,遍历图中全部节点后回到原点,求最小代价。
一般的深度优先搜索如下所示:
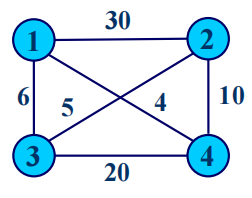
- 定义解空间:𝑋 = {12341, 12431, 13241, 13421, 14231, 14321}
- 构造解空间树;
- 从A出发按DFS搜索整棵树。
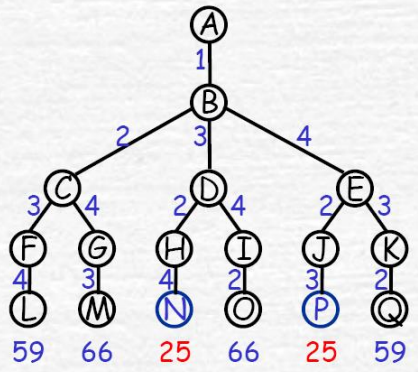
最优解:13241,14231
成本:25
回溯法基本思想:利用排列生成问题的回溯算法Backtrack(2),对𝑥[] = {1, 2, … , 𝑛}的𝑥[2. . 𝑛]进行全排列,则 (𝑥[1] , 𝑥[2]),(𝑥[2], 𝑥[3]) , … , (𝑥[𝑛], 𝑥[1])构成一个回路。在全排列算法的基础上,进行路径计算保存以及进行限界剪枝。
伪代码如下:
main( int n )
{
𝑎[𝑛][𝑛]; 𝑥[𝑛] = {1,2, … , 𝑛};
𝑏𝑒𝑠𝑡𝑥[]; cc=0;
𝑏𝑒𝑠𝑡𝑣 = ∞;//bestx保存当前最佳路径,bestv保存当前最优值
input(𝑎); //输入邻接矩阵
TSPBacktrack(2);
output( 𝑏𝑒𝑠𝑡𝑣, 𝑏𝑒𝑠𝑡𝑥[]);
}TSPBacktrack(int i)
{// 𝑐𝑐记录(𝑥[1], 𝑥[2]), … , (𝑥[𝑖 − 1], 𝑥[𝑖])的距离和if(i>n){// 搜索到叶结点,输出可行解与当前解比较if(cc +a[x[n]][1] < bestv or bestv = ∞){bestv = cc+a[x[n]][1];for(j=1;j<= n; j++) bestx[j]= x[j];}
}
else{for(j=i;j<=n;j++)if(cc+a[x[i-1]][x[j]]<bestv or bestv = ∞)// 限界裁剪子树}swap(x[i],x[j]);cc += a[x[i-1]][x[i]];TSPBackstrack(i+1);cc -= a[x[i-1]][x[i]];swap(x[i],x[j]);
}
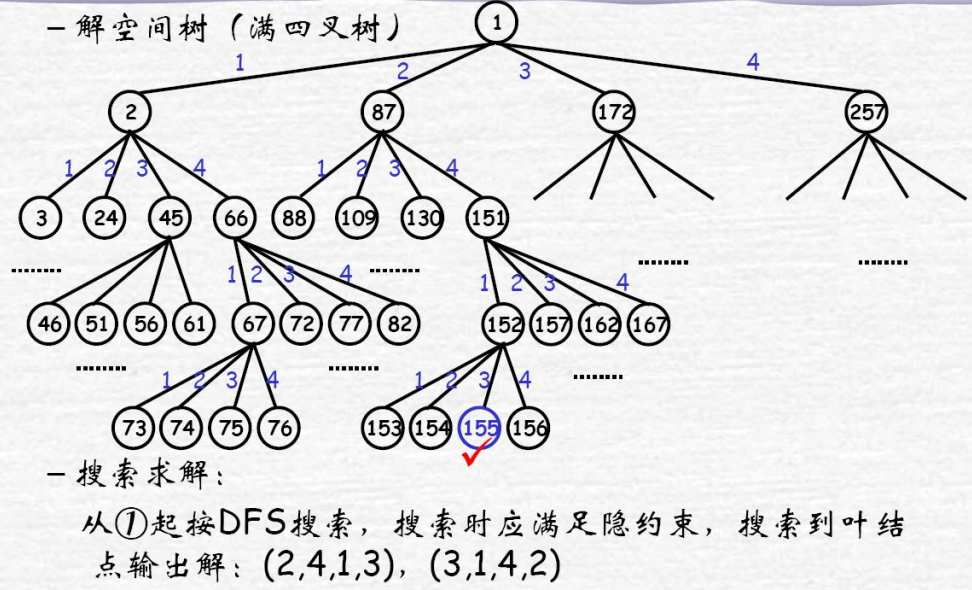
n皇后问题
为了便于分析,我们取n=4.
问题描述:在4 × 4棋盘上放上4个皇后,使皇后彼此不受攻击。不受攻击的条件是彼此不在同行(列)、斜线上。求出全部的放法。
解表示:
解编码:(𝑥1, 𝑥2, 𝑥3, 𝑥4)四元组,𝑥𝑖表示皇后放在第𝑖行上的列号,如(3,1,2,4);
解空间:{ 𝑥1, 𝑥2, 𝑥3, 𝑥4 |𝑥𝑖 ∈ 𝑆, 𝑖 = 1~4)} 𝑆 = {1,2,3,4}
可行解满足:
- 显约束:𝑥𝑖 ∈ 𝑆, 𝑖 = 1~4
- 隐约束:

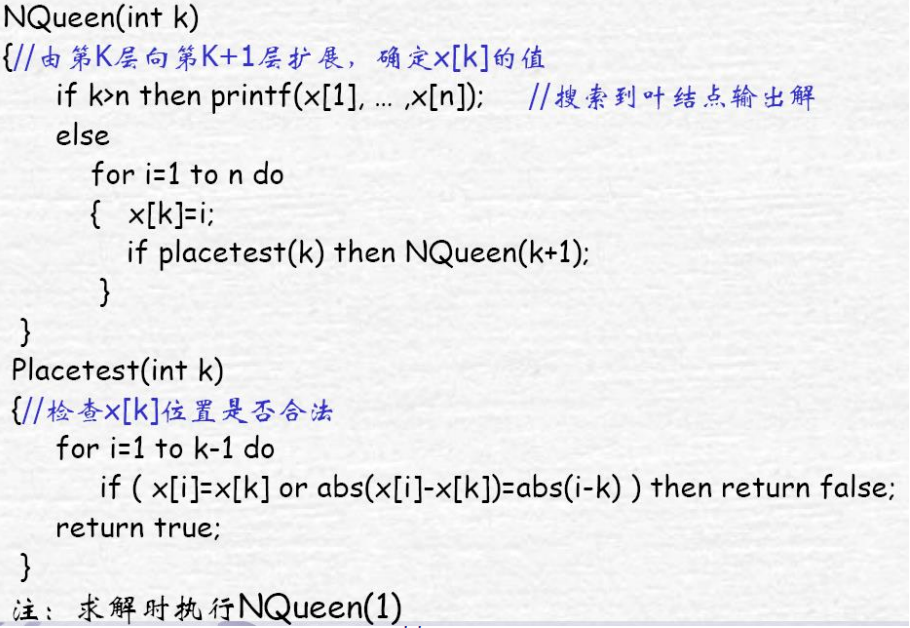
递归算法:
回溯法效率分析
效率影响因素:
通过前面具体实例的讨论容易看出,回溯算法的效率在很大程度上依赖于以下因素:
- 产生𝑥[𝑡]的时间;
- 满足显约束的𝑥[𝑡]值的个数;
- 计算约束函数constraint的时间;
- 计算上界函数bound的时间;
- 满足约束函数和上界函数约束的所有𝑥[𝑘]的个数。
好的约束函数能显著地减少所生成的结点数。但这样的约束函数往往计算量较大。因此,在选择约束函数时通常存在生成结点数与约束函数计算量之间的折衷。
效率提高技巧:
对于许多问题而言,在搜索试探时选取𝑥[𝑖]的值顺序是任意的。在其它条件相当的前提下,让可取值最少的𝑥[𝑖]优先。从图中关于同一问题的2棵不同解空间树,可以体会到这种策略的潜力。