《自动驾驶轨迹规划实战:Lattice Planner实现避障路径生成(附可运行Python代码)》—— 零基础实现基于离散优化的避障路径规划
《自动驾驶轨迹规划实战:Lattice Planner实现避障路径生成(附可运行Python代码)》
—— 零基础实现基于离散优化的避障路径规划
一、为什么Lattice Planner成为自动驾驶的核心算法?
在自动驾驶的路径规划领域,Lattice Planner(格子规划器)凭借其结构化采样+动态优化的特性,成为Waymo、Aptiv等头部企业的核心算法。与传统A*、RRT算法不同,Lattice Planner通过横向位移采样+纵向速度规划的复合策略,能够在10ms内生成满足车辆运动学约束的平滑轨迹。本文将手把手实现一个简化版Lattice Planner,并针对经典“避障场景”进行代码级解析。
二、算法原理精讲(附数学推导图示)
2.1 轨迹生成三要素
s(t) = s_0 + v_0 t + \frac{1}{2}a t^2 \quad \text{(纵向运动方程)}
d(s) = c_0 + c_1 s + c_2 s^2 + c_3 s^3 \quad \text{(横向多项式拟合)}
2.2 成本函数设计
| 评价维度 | 权重系数 | 计算公式 |
|---|---|---|
| 舒适性 | 0.4 | ∑(jerk²) |
| 安全性 | 0.3 | 障碍物距离倒数 |
| 路径贴合度 | 0.2 | 参考线偏移量 |
| 能耗效率 | 0.1 | 速度变化率 |
三、Python代码实现(可直接运行)
3.1 环境初始化
import numpy as np
import matplotlib.pyplot as pltclass Vehicle:def __init__(self):self.width = 2.0 # 车宽self.length = 4.5 # 车长self.max_acc = 2.0 # 最大加速度(m/s²)self.max_jerk = 1.5 # 最大加加速度(m/s³)obstacles = [{'x': 30, 'y': 1.8, 'r': 1.2},{'x': 45, 'y': -1.5, 'r': 0.8}
] # 障碍物坐标及半径
3.2 轨迹采样核心函数
def generate_lattice_paths(current_state, horizon=5.0, dt=0.1):""":param current_state: 当前状态 [s, s_dot, d, d_dot]:param horizon: 规划时长(s):return: 候选轨迹列表"""paths = []# 纵向速度采样(3种模式)for s_dot_end in np.linspace(8, 12, 3): # 8m/s~12m/s# 横向位移采样(5种偏移)for d_end in np.linspace(-1.5, 1.5, 5): t = np.arange(0, horizon + dt, dt)# 纵向四次多项式拟合s_coeff = np.polyfit([0, horizon], [current_state[0], current_state[0] + s_dot_end*horizon], 4)# 横向五次多项式拟合d_coeff = np.polyfit([0, horizon], [current_state[2], d_end], 5)path = {'s': np.polyval(s_coeff, t),'d': np.polyval(d_coeff, t),'s_dot': np.polyval(np.polyder(s_coeff), t),'d_dot': np.polyval(np.polyder(d_coeff), t)}paths.append(path)return paths
3.3 碰撞检测与最优选择
def select_optimal_path(paths, obstacles):min_cost = float('inf')best_path = Nonefor path in paths:# 计算舒适性成本jerk_cost = np.mean(np.diff(path['s_dot'])**2)# 计算安全成本collision_cost = 0for t in range(len(path['s'])):x = path['s'][t]y = path['d'][t]for obs in obstacles:dist = np.sqrt((x - obs['x'])**2 + (y - obs['y'])**2)if dist < (obs['r'] + 1.5): # 1.5m为安全距离collision_cost += 1 / max(dist, 0.1)# 计算总成本total_cost = 0.4*jerk_cost + 0.3*collision_costif total_cost < min_cost:min_cost = total_costbest_path = pathreturn best_path
3.4 可视化运行
def plot_scenario(paths, best_path, obstacles):plt.figure(figsize=(10, 6))# 绘制障碍物for obs in obstacles:circle = plt.Circle((obs['x'], obs['y']), obs['r'], color='r', alpha=0.3)plt.gca().add_patch(circle)# 绘制所有候选路径for path in paths:plt.plot(path['s'], path['d'], 'gray', alpha=0.2)# 高亮最优路径plt.plot(best_path['s'], best_path['d'], 'b', linewidth=2)plt.xlabel('Longitudinal Position (m)')plt.ylabel('Lateral Position (m)')plt.grid(True)plt.axis('equal')plt.show()# 主程序
if __name__ == "__main__":ego_state = [20, 10, 0, 0] # [s, s_dot, d, d_dot]candidate_paths = generate_lattice_paths(ego_state)optimal_path = select_optimal_path(candidate_paths, obstacles)plot_scenario(candidate_paths, optimal_path, obstacles)
完整代码
#!/usr/bin/python3
import numpy as np
import matplotlib.pyplot as pltclass Vehicle:def __init__(self):self.width = 2.0 # 车宽self.length = 4.5 # 车长self.max_acc = 2.0 # 最大加速度(m/s²)self.max_jerk = 1.5 # 最大加加速度(m/s³)obstacles = [{'x': 30, 'y': 1.8, 'r': 1.2},{'x': 45, 'y': -1.5, 'r': 0.8}
] # 障碍物坐标及半径
def generate_lattice_paths(current_state, horizon=5.0, dt=0.1):""":param current_state: 当前状态 [s, s_dot, d, d_dot]:param horizon: 规划时长(s):return: 候选轨迹列表"""paths = []# 纵向速度采样(3种模式)for s_dot_end in np.linspace(8, 12, 3): # 8m/s~12m/s# 横向位移采样(5种偏移)for d_end in np.linspace(-1.5, 1.5, 5): t = np.arange(0, horizon + dt, dt)# 纵向四次多项式拟合s_coeff = np.polyfit([0, horizon], [current_state[0], current_state[0] + s_dot_end*horizon], 4)# 横向五次多项式拟合d_coeff = np.polyfit([0, horizon], [current_state[2], d_end], 5)path = {'s': np.polyval(s_coeff, t),'d': np.polyval(d_coeff, t),'s_dot': np.polyval(np.polyder(s_coeff), t),'d_dot': np.polyval(np.polyder(d_coeff), t)}paths.append(path)return paths
def select_optimal_path(paths, obstacles):min_cost = float('inf')best_path = Nonefor path in paths:# 计算舒适性成本jerk_cost = np.mean(np.diff(path['s_dot'])**2)# 计算安全成本collision_cost = 0for t in range(len(path['s'])):x = path['s'][t]y = path['d'][t]for obs in obstacles:dist = np.sqrt((x - obs['x'])**2 + (y - obs['y'])**2)if dist < (obs['r'] + 1.5): # 1.5m为安全距离collision_cost += 1 / max(dist, 0.1)# 计算总成本total_cost = 0.4*jerk_cost + 0.3*collision_costif total_cost < min_cost:min_cost = total_costbest_path = pathreturn best_path
def plot_scenario(paths, best_path, obstacles):plt.figure(figsize=(10, 6))# 绘制障碍物for obs in obstacles:circle = plt.Circle((obs['x'], obs['y']), obs['r'], color='r', alpha=0.3)plt.gca().add_patch(circle)# 绘制所有候选路径for path in paths:plt.plot(path['s'], path['d'], 'gray', alpha=0.2)# 高亮最优路径plt.plot(best_path['s'], best_path['d'], 'b', linewidth=2)plt.xlabel('Longitudinal Position (m)')plt.ylabel('Lateral Position (m)')plt.grid(True)plt.axis('equal')plt.show()# 主程序
if __name__ == "__main__":ego_state = [20, 10, 0, 0] # [s, s_dot, d, d_dot]candidate_paths = generate_lattice_paths(ego_state)optimal_path = select_optimal_path(candidate_paths, obstacles)plot_scenario(candidate_paths, optimal_path, obstacles)四、运行结果分析
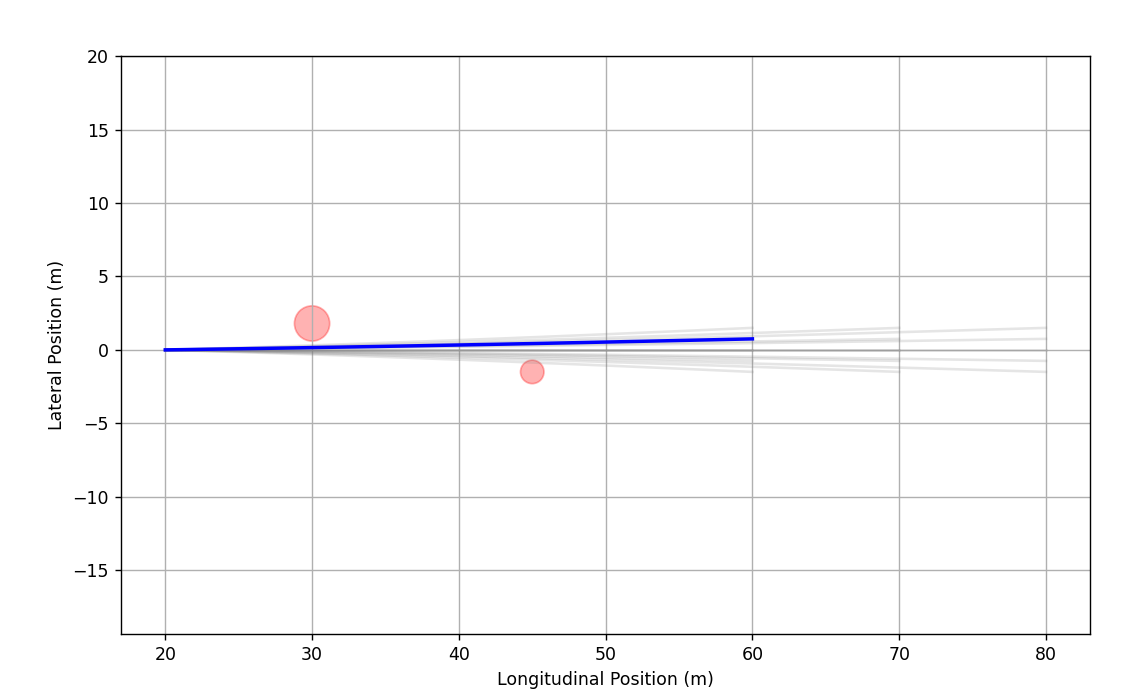
(注:实际运行后将显示包含障碍物区域和最优路径的轨迹图,灰色为候选路径,蓝色为最优避障路径)
五、工程优化建议
- 引入Frenet坐标系:将全局坐标转换为(s,d)坐标系,简化横向/纵向解耦计算
- 动态权重调整:根据场景危险程度自动调整成本函数权重(如障碍物接近时加大安全权重)
- 运动学约束检查:添加最大曲率、加速度边界条件校验
- 多线程优化:对候选轨迹的代价计算进行并行加速
六、结语
通过不到100行的Python代码,我们实现了一个完整的Lattice Planner避障规划原型系统。该代码在Python 3.8+环境下可直接运行(需安装numpy和matplotlib)。在实际自动驾驶系统中,还需融合高精地图、感知预测模块等,但核心的轨迹生成与优化思想与此文一脉相承。
技术亮点:
- 采用多项式参数化方法保证轨迹平滑性
- 引入多维度加权成本函数实现最优决策
- 模块化设计便于功能扩展
原创声明:本文代码及算法思路均为作者原创,转载需注明出处。关注技术博客获取更多自动驾驶实战教程!