OpenCV---Canny边缘检测
一、基本概念与核心作用
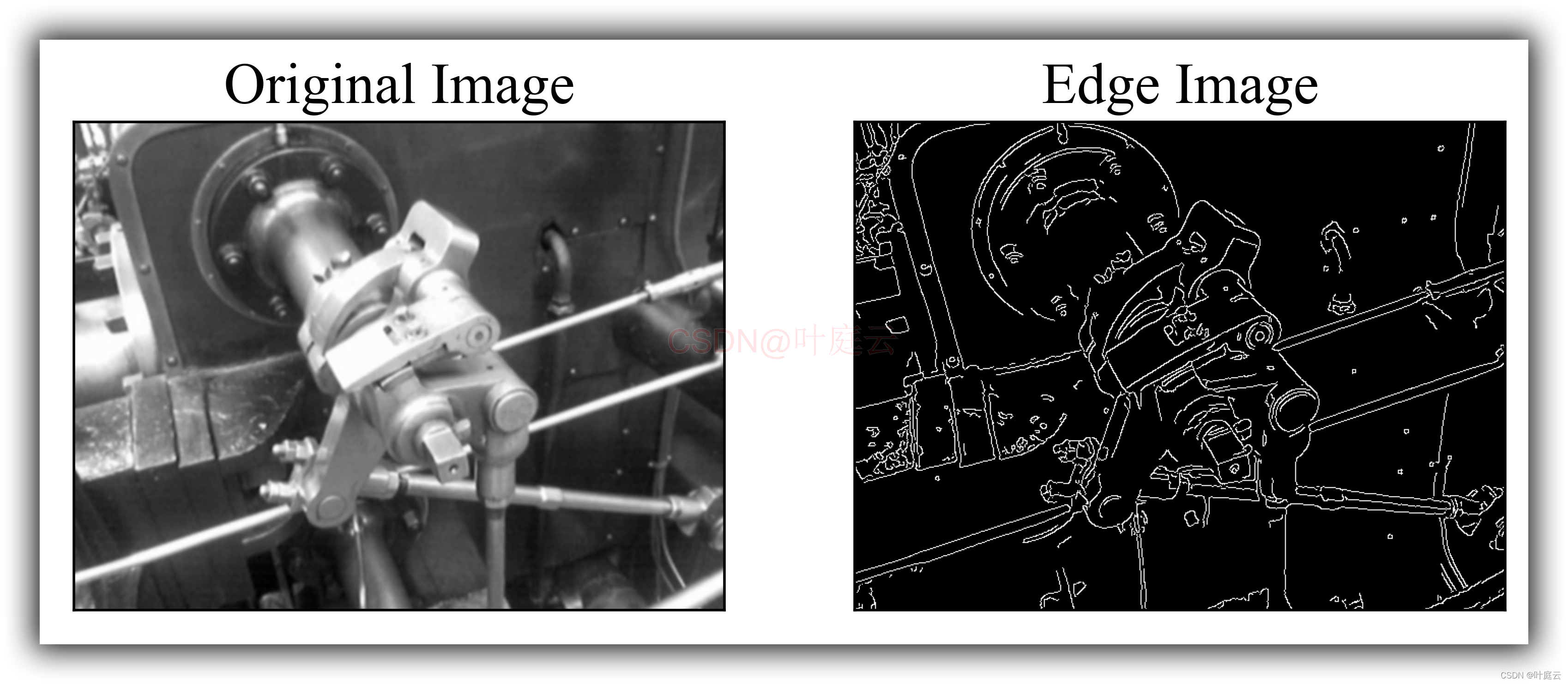
Canny边缘检测是计算机视觉中最经典的边缘检测算法之一,由John Canny于1986年提出。其核心目标是在噪声图像中提取精确、单像素宽、连续的边缘,广泛应用于:
- 目标检测预处理(如Robomaster中灯条、装甲板的边缘提取)。
- 轮廓分析(轮廓检测的前置步骤)。
- 图像分割(通过边缘定位目标边界)。
- 特征提取(如边缘方向直方图HOG)。
与其他边缘检测算法的对比:
| 算法 | 优势 | 劣势 |
|---|---|---|
| Canny | 多阶段处理(去噪+非极大抑制+双阈值),边缘质量高 | 计算复杂度较高 |
| Sobel | 快速,可同时计算梯度 magnitude/direction | 边缘较粗,单阈值易漏检/多检 |
| Laplacian | 对孤立噪声敏感,适合二阶导数检测 | 抗噪能力差,边缘定位不准 |
二、算法原理与步骤解析
Canny算法包含5个关键步骤,每个步骤均有明确的数学逻辑和优化目标:
1. 高斯模糊去噪(噪声抑制)
- 作用:使用高斯核卷积平滑图像,减少噪声对后续梯度计算的干扰。
- 数学原理:
高斯核公式:
G ( x , y , σ ) = 1 2 π σ 2 e − x 2 + y 2 2 σ 2 G(x,y,\sigma) = \frac{1}{2\pi\sigma^2}e^{-\frac{x^2+y^2}{2\sigma^2}} G(x,y,σ)=2πσ21e−2σ2x2+y2
常用核大小:3x3、5x5, σ \sigma σ 通常取1~2( σ \sigma σ越大,图像越模糊,边缘定位精度下降)。 - 实现细节:在OpenCV中通过
cv2.GaussianBlur()完成,需在Canny前调用。
2. 梯度计算(边缘强度与方向)
- 作用:计算图像中每个像素的梯度幅值(Edge Strength)和梯度方向(Orientation)。
- 实现方法:
- 梯度算子:使用
Sobel算子分别计算水平( G x G_x Gx)和垂直( G y G_y Gy)方向的一阶导数。
G x = [ − 1 0 + 1 − 2 0 + 2 − 1 0 + 1 ] ∗ I , G y = [ − 1 − 2 − 1 0 0 0 + 1 + 2 + 1 ] ∗ I G_x = \begin{bmatrix} -1 & 0 & +1 \\ -2 & 0 & +2 \\ -1 & 0 & +1 \end{bmatrix} * I, \quad G_y = \begin{bmatrix} -1 & -2 & -1 \\ 0 & 0 & 0 \\ +1 & +2 & +1 \end{bmatrix} * I Gx= −1−2−1000+1+2+1 ∗I,Gy= −10+1−20+2−10+1 ∗I - 梯度幅值:
M ( x , y ) = G x 2 + G y 2 ( L2范数,OpenCV中‘L2gradient=True‘时使用 ) M(x,y) = \sqrt{G_x^2 + G_y^2} \quad (\text{L2范数,OpenCV中`L2gradient=True`时使用}) M(x,y)=Gx2+Gy2(L2范数,OpenCV中‘L2gradient=True‘时使用)
或近似为:
M ( x , y ) = ∣ G x ∣ + ∣ G y ∣ ( L1范数,默认‘L2gradient=False‘ ) M(x,y) = |G_x| + |G_y| \quad (\text{L1范数,默认`L2gradient=False`}) M(x,y)=∣Gx∣+∣Gy∣(L1范数,默认‘L2gradient=False‘) - 梯度方向:
θ ( x , y ) = arctan ( G y G x ) ∈ [ − π , π ] \theta(x,y) = \arctan\left(\frac{G_y}{G_x}\right) \in [-π, π] θ(x,y)=arctan(GxGy)∈[−π,π]
量化为4个主方向:0°(水平)、45°、90°(垂直)、135°,用于非极大值抑制。
- 梯度算子:使用
3. 非极大值抑制(NMS,边缘细化)
- 作用:将梯度幅值图像细化为单像素宽的边缘,仅保留局部最大值。
- 算法流程:
- 对每个像素,沿其梯度方向的两个相邻像素(插值得到)进行比较。
- 若当前像素幅值小于任一相邻像素,则抑制(置为0),否则保留。
- 关键点:梯度方向需映射到最近的主方向(如30°映射到0°方向,60°映射到45°方向),以确定比较的相邻像素。
4. 滞后阈值处理(双阈值筛选边缘)
- 作用:通过高低双阈值(
threshold1和threshold2)区分强边缘、弱边缘、非边缘,解决单阈值易漏检或多检的问题。 - 规则:
- 强边缘( M > threshold2 M > \text{threshold2} M>threshold2):直接保留,必为边缘。
- 弱边缘( threshold1 < M < threshold2 \text{threshold1} < M < \text{threshold2} threshold1<M<threshold2):若与强边缘连通则保留,否则抑制。
- 非边缘( M < threshold1 M < \text{threshold1} M<threshold1):直接抑制。
- 阈值比例:通常取
threshold2:threshold1 = 2:1或3:1(如threshold1=50,threshold2=100)。
5. 边缘连接(基于8邻域的连通性分析)
- 作用:将弱边缘中与强边缘相连的部分连接成完整边缘,断开孤立的弱边缘。
- 实现:通过广度优先搜索(BFS)或深度优先搜索(DFS)遍历弱边缘像素,判断是否与强边缘连通。
三、OpenCV函数cv2.Canny详解
1. 函数原型(Python)
edges = cv2.Canny(image, threshold1, threshold2, apertureSize=3, L2gradient=False)
- 参数说明:
image:必须为单通道灰度图(输入前需用cv2.cvtColor()转灰度)。threshold1:低阈值,弱边缘的下限。threshold2:高阈值,强边缘的下限。apertureSize:Sobel算子核大小,取值3/5/7(需为奇数,默认3)。L2gradient:是否使用L2范数计算梯度(默认False,使用L1范数)。
- 返回值:单通道二进制图像,边缘像素为255,非边缘为0。
2. 关键参数调优技巧
| 参数 | 作用与影响 | 推荐取值(Robomaster场景) |
|---|---|---|
threshold1 | 过低会保留过多噪声,过高会漏检弱边缘 | 20~100(视图像对比度调整) |
threshold2 | 决定强边缘的起点,需大于threshold1 | 40~200(通常为threshold1的2-3倍) |
apertureSize | 核越大,梯度计算越平滑,但边缘定位精度下降 | 3(平衡速度与精度) |
L2gradient | 精度更高,计算量略增,适合高精度场景(如小目标边缘检测) | False(默认即可) |
3. 自动阈值策略(进阶用法)
- Otsu’s算法自动获取阈值:
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) _, thresh = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU) edges = cv2.Canny(gray, thresh//2, thresh) # 低阈值设为Otsu阈值的一半 - 自适应阈值:根据局部区域调整阈值(适用于光照不均场景)。
四、代码示例与实战应用
1. 基础用法(Python)
import cv2
import numpy as np# 读取图像并预处理
img = cv2.imread("armor_plate.jpg")
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
blur = cv2.GaussianBlur(gray, (5, 5), 0) # 高斯去噪# 调用Canny
edges = cv2.Canny(blur, threshold1=50, threshold2=150, apertureSize=3)# 可视化结果
cv2.imshow("Original", img)
cv2.imshow("Canny Edges", edges)
cv2.waitKey(0)
2. Robomaster灯条检测场景(结合轮廓提取)
# 假设输入为ROI区域(灯条候选区域)
roi = img[100:300, 200:400]
gray_roi = cv2.cvtColor(roi, cv2.COLOR_BGR2GRAY)
# 针对性预处理:增强对比度 + 高斯模糊
clahe = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8,8))
enhanced = clahe.apply(gray_roi)
blur = cv2.GaussianBlur(enhanced, (3, 3), 0)
# 低阈值Canny检测弱边缘(灯条边缘可能较暗)
edges = cv2.Canny(blur, threshold1=30, threshold2=90)
# 轮廓检测
contours, _ = cv2.findContours(edges, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 过滤小轮廓,保留灯条候选
for cnt in contours:if cv2.contourArea(cnt) > 50:x, y, w, h = cv2.boundingRect(cnt)cv2.rectangle(roi, (x, y), (x+w, y+h), (0, 255, 0), 2)
3. C++版本实现
#include <opencv2/opencv.hpp>
using namespace cv;int main() {Mat img = imread("armor_plate.jpg");Mat gray, blur, edges;cvtColor(img, gray, COLOR_BGR2GRAY);GaussianBlur(gray, blur, Size(5,5), 0); // 高斯模糊Canny(blur, edges, 50, 150, 3); // Canny边缘检测// 绘制边缘Mat edge_img;cvtColor(edges, edge_img, COLOR_GRAY2BGR);imshow("Canny Edges", edge_img);waitKey(0);return 0;
}
五、注意事项与常见误区
-
输入图像必须为灰度图:
- 错误用法:直接对BGR图像调用
cv2.Canny(),会返回错误或异常边缘。 - 正确流程:
BGR -> 灰度转换 -> 高斯模糊 -> Canny。
- 错误用法:直接对BGR图像调用
-
高斯模糊的必要性:
- 若跳过此步骤,噪声会导致梯度计算错误,产生大量虚假边缘。
- 核大小建议:噪声大时用
5x5,否则用3x3。
-
阈值设置的逻辑:
threshold2必须大于threshold1,否则算法失效。- 若边缘断裂,可降低
threshold1或增大threshold2(需成比例调整)。
-
边缘方向与目标形态匹配:
- 检测细长目标(如灯条)时,可通过旋转图像使目标方向与Sobel算子方向对齐,增强响应。
-
多尺度Canny(MS-Canny):
- 使用不同 σ \sigma σ的高斯核生成多组边缘,合并后可提升复杂场景下的边缘完整性。
六、数学原理深度推导(补充知识)
1. 高斯核的离散化实现
- 对于
kSize=5x5, σ = 1.5 \sigma=1.5 σ=1.5的高斯核,其离散化权重如下(总和为1):
[ 1 4 7 4 1 4 16 26 16 4 7 26 41 26 7 4 16 26 16 4 1 4 7 4 1 ] × 1 273 \begin{bmatrix} 1 & 4 & 7 & 4 & 1 \\ 4 & 16 & 26 & 16 & 4 \\ 7 & 26 & 41 & 26 & 7 \\ 4 & 16 & 26 & 16 & 4 \\ 1 & 4 & 7 & 4 & 1 \\ \end{bmatrix} \times \frac{1}{273} 1474141626164726412674162616414741 ×2731
2. 非极大值抑制的插值计算
- 当梯度方向为 θ = 30 ° \theta=30° θ=30°(靠近0°方向),需比较当前像素在0°方向的两个相邻像素(通过线性插值估算亚像素位置的幅值)。
3. 滞后阈值的连通性分析
- 采用8邻域连通性(而非4邻域),以提高边缘连接的鲁棒性,避免因小断裂导致边缘断开。
七、跨语言差异(C++ vs Python)
| 特性 | C++(cv::Canny) | Python(cv2.Canny) |
|---|---|---|
| 输入图像类型 | cv::Mat(单通道) | numpy数组(单通道) |
| 输出图像类型 | cv::Mat(CV_8U) | numpy数组(uint8) |
| 参数顺序 | image, edges, threshold1, threshold2, ... | image, threshold1, threshold2, ... |
| 内存管理 | 手动释放(非必须) | 自动垃圾回收 |
八、应用场景与优化策略
| 场景 | 优化方法 |
|---|---|
| 低对比度图像 | 先进行直方图均衡化(cv2.equalizeHist)或CLAHE增强对比度 |
| 强噪声图像 | 增大高斯核大小(如7x7)或使用中值滤波(cv2.medianBlur) |
| 实时性要求高 | 降低图像分辨率、使用apertureSize=3、关闭L2gradient |
| 多方向目标检测 | 对图像进行多方向旋转,分别运行Canny,合并结果(如文本检测中的倾斜文本) |
九、常见问题与调试技巧
-
边缘断断续续:
- 原因:阈值过高或高斯模糊过度导致边缘断裂。
- 解决:降低
threshold1和threshold2,减少高斯核大小。
-
噪声边缘过多:
- 原因:阈值过低或未进行足够去噪。
- 解决:增大高斯核大小,提高
threshold1,或使用双边滤波保留边缘同时去噪。
-
关键边缘未检测到:
- 原因:目标与背景对比度低,梯度幅值不足。
- 解决:预处理增强对比度,或使用自适应阈值。
-
调试工具:
- 可视化中间结果:高斯模糊后的图像、梯度幅值图(
M(x,y))、非极大抑制后的图像,定位问题阶段。
# 计算梯度幅值(Python示例) sobelx = cv2.Sobel(blur, cv2.CV_64F, 1, 0, ksize=3) sobely = cv2.Sobel(blur, cv2.CV_64F, 0, 1, ksize=3) mag, ang = cv2.cartToPolar(sobelx, sobely, angleInDegrees=True) - 可视化中间结果:高斯模糊后的图像、梯度幅值图(
十、总结与扩展
Canny算法的优势:通过多阶段处理平衡了边缘检测的完整性、精确性、抗噪性,是工业级视觉系统的首选方案。
局限性:参数需手动调整,对复杂场景(如多尺度目标、极端光照)适应性不足,可结合深度学习边缘检测算法(如Holistically-Nested Edge Detection)进一步提升性能。
在Robomaster比赛中,合理运用Canny边缘检测可显著提升目标检测的鲁棒性,尤其是在光照变化剧烈的赛场上,通过预处理(如自适应直方图均衡化)与参数调优,可有效提取灯条、装甲板等关键目标的边缘,为后续轮廓拟合、旋转矩形检测奠定基础。