低成本自动化改造技术锚点深度解析
执行摘要
本文旨在深入剖析四项关键的低成本自动化技术,这些技术为工业转型提供了显著的运营和经济效益。文章将提供实用且深入的指导,涵盖老旧设备联网、AGV车队优化、空压机系统智能能耗管控以及此类项目投资回报率(ROI)的严谨计算。通过实施这些技术,企业有望实现设备综合效率(OEE)的提升、物流效率的增强、能源成本的大幅降低,并为自动化项目提供清晰的财务依据。本文将逐一解析这四个技术深度点及其在低成本自动化背景下的战略重要性。
1. 焕新旧资产:机床设备的工业物联网(IIoT)赋能
在现代数据驱动的制造环境中,如何将老旧的、非联网的设备整合进来是一个普遍挑战。本章节将探讨利用高性价比的工业物联网(IIoT)解决方案,实现对这些传统设备的现代化改造。核心关注点在于数据采集的实际部署,这是实现状态监测、预测性维护和设备综合效率(OEE)提升的首要步骤。
1.1. 低成本数据采集:树莓派与RS485转WiFi架构
1.1.1. 系统设计与组件剖析
在预算有限的情况下,选择合适的硬件平台至关重要。树莓派(Raspberry Pi)因其低于40美元的成本、基于Linux的操作系统、丰富的连接选项(如内置WiFi的型号 )以及灵活的编程环境(支持Python、C等语言),成为此类应用的理想选择。相较于昂贵的工业PLC或专用数据采集系统,树莓派提供了极具吸引力的性价比。
系统的核心组件包括:
- 树莓派 (Raspberry Pi): 作为中央处理单元。推荐选用带有板载WiFi的型号,如Raspberry Pi 3 Model B或更新版本,以便于无线数据传输 。
- RS485接口: RS485总线因其在工业环境中的鲁棒性和长距离传输能力而被广泛采用。实现RS485通信有多种方案:
- RS485 HAT扩展板 (适用于树莓派): 例如DFRobot DFR0824,这类扩展板通常集成了隔离电路和保护电路,提高了连接的可靠性和安全性,并且易于与树莓派集成。
- USB转RS485转换器: 这是另一种选择,对于某些设置可能更为简单。
- RS485转WiFi/以太网模块: 例如有人USR-W610 或微雪RS485 TO WIFI/ETH。此类模块负责将来自机床的RS485串行数据桥接到本地无线网络。它们通常支持多种工作模式(如STA客户端模式、AP接入点模式)和协议转换功能(如Modbus RTU转Modbus TCP),并能实现数据的透明传输。
表1.1:精细化设备联网方案成本分析
| 成本项目 | 单价范围(USD) | 数量 | 合计(USD) | 备注 |
|---|---|---|---|---|
| 树莓派4 Model B 2GB | 35-45 | 1 | 35-45 | 核心计算单元 |
| RS485转WiFi模块 | 20-30 | 1 | 20-30 | 协议转换 |
| 电源适配器 | 8-12 | 1 | 8-12 | 5V 3A |
| 存储卡 | 5-10 | 1 | 5-10 | 16GB工业级 |
| 外壳 | 5-15 | 1 | 5-15 | 防尘防水 |
| 连接线缆 | 5-10 | 若干 | 5-10 | RS485线等 |
| 总计 | 78-122 | 单机成本 | ||
| 10台规模 | 780-1220 | 批量采购可降低成本 |
数据流向通常如下:机床(通过RS485输出数据)-> RS485转WiFi模块 -> WiFi网络 -> 树莓派(进行本地数据处理、记录或转发)-> (可选) MQTT代理/云平台。
表1.2: RS485转WiFi模块选型对比
| 模块型号 | 制造商 | 价格范围(USD) | 最大传输速率 | 安全性 | 配置方式 | 电源要求 | 特点 |
|---|---|---|---|---|---|---|---|
| USR-W610 | 有人物联网 | 20-30 | 115200bps | WPA2-PSK | 网页/AT指令 | 5V DC | 支持虚拟串口、TCP服务器/客户端、UDP |
| USR-WIFI232-T2 | 有人物联网 | 15-25 | 460800bps | WPA/WPA2 | 网页/AT指令 | 3.3-5V DC | 低功耗、小体积,适合空间受限场景 |
| ATC-1000WF | 安信可 | 18-28 | 230400bps | WPA2 | AT指令/配置软件 | 5V DC | 工业级温度范围,抗干扰能力强 |
| NP06-W2 | 南方芯 | 25-35 | 921600bps | WPA2企业级 | 网页/手机APP | 5-24V DC | 支持4G备份,适合工业现场 |
| ESP32-RS485 | 微雪电子 | 10-15 | 115200bps | WPA2 | Arduino编程 | 3.3V DC | 开源,高度可定制,适合DIY项目 |
软件栈方面,树莓派上运行Raspberry Pi OS,数据采集脚本通常使用Python编写,并借助pyserial库进行串口通信,pymodbus库处理Modbus协议。如果结合Arduino进行RS485接口处理或数据预处理,则会涉及Arduino C/C++编程。
尽管树莓派方案初期成本低廉,但其组件多为消费级,在严苛的工业环境中长期运行的可靠性及维护工作(如SD卡故障、I/O保护相对PLC较弱)可能导致总体拥有成本(TCO)上升或意外停机。因此,在部署时应考虑采用工业级SD卡、合适的防护外壳,并优先选择带有更强保护电路的HAT扩展板,同时准备备件以应对潜在故障。
1.1.2. 详细物料清单 (BOM) 与成本估算
为了清晰展示"低成本"特性,下表提供了一个基于树莓派的机床数据采集单元的示例物料清单。
表1:基于树莓派的机床数据采集单元示例BOM
| 组件名称 | 制造商/供应商示例 | 预估单价 (USD) | 数量 | 总预估成本 (USD) |
|---|---|---|---|---|
| 树莓派4 Model B 2GB | Raspberry Pi Foundation | 35-45 | 1 | 35-45 |
| RS485转WiFi模块 USR-W610 | 有人物联网 USR IOT | 20-30 | 1 | 20-30 |
| (或) RS485 HAT DFR0824 | DFRobot | 15-25 | 1 | 15-25 |
| MicroSD卡 (16GB, Class 10) | SanDisk, Kingston 等 | 5-10 | 1 | 5-10 |
| 树莓派电源适配器 (5V, 3A) | 官方或兼容品牌 | 8-12 | 1 | 8-12 |
| 简易外壳 | 通用 | 5-15 | 1 | 5-15 |
| 连接线缆 (RS485线, 电源线等) | 通用 | 5-10 | 若干 | 5-10 |
| 总计 (估算) | 93-147 |
注:价格为预估,实际价格可能因供应商、地区和购买时间而异。选择RS485 HAT或USB转RS485模块,以及不同型号的树莓派,都会影响最终成本。
此BOM清晰地列出了主要组件及其大致成本,为项目预算提供了参考。
1.1.3. 实施指南:硬件组装、Arduino/Python代码 (Modbus/MQTT集成)
硬件组装:
将机床的RS485输出端子(通常为A、B两线)连接到RS485转WiFi模块的对应端子。根据模块手册配置其网络参数,使其连接到工厂的WiFi网络。树莓派通过网络接收来自该模块的数据。如果使用RS485 HAT,则直接将其安装在树莓派的GPIO引脚上。
树莓派设置:
安装Raspberry Pi OS,并通过pip安装必要的Python库,如pyserial(用于串口通信)、pymodbus(用于Modbus协议通信)和paho-mqtt(用于MQTT通信)。根据所选的RS485接口(HAT或USB转换器),配置相应的串口设备。
Arduino代码 (若适用):
如果采用Arduino作为RS485接口的中间件(例如,配合MAX485收发器模块),Arduino将负责读取机床的Modbus数据,然后通过USB串口或I2C等方式传递给树莓派。
以下是一个概念性的Arduino代码片段,用于通过MAX485模块从Modbus从站设备读取保持寄存器:
C++\#**include** \<ModbusMaster.h\>// MAX485控制引脚 (根据实际连接修改)
\#**define** MAX485\_DE\_RE\_PIN 2 // DE和RE引脚连接在一起ModbusMaster node; // 实例化ModbusMaster对象void preTransmission() { digitalWrite(MAX485\_DE\_RE\_PIN, HIGH); // 切换到发送模式
}void postTransmission() { digitalWrite(MAX485\_DE\_RE\_PIN, LOW); // 切换到接收模式
}void setup() { pinMode(MAX485\_DE\_RE\_PIN, OUTPUT); digitalWrite(MAX485\_DE\_RE\_PIN, LOW); // 初始为接收模式Serial.begin(9600); // 初始化串口通信 (与Modbus设备波特率一致) node.begin(1, Serial); // Modbus从站ID为1, 使用Serial进行通信 node.preTransmission(preTransmission); // 设置发送前回调 node.postTransmission(postTransmission); // 设置发送后回调
}void loop() { uint8\_t result; uint16\_t data; // 假设读取2个保持寄存器// 从从站ID为1的设备,读取起始地址为0的2个保持寄存器 result \= node.readHoldingRegisters(0, 2);if (result \== node.ku8MBSuccess) { Serial.print("Reg 0: "); Serial.println(node.getResponseBuffer(0)); // 获取第一个寄存器值 Serial.print("Reg 1: "); Serial.println(node.getResponseBuffer(1)); // 获取第二个寄存器值 } else { Serial.print("Modbus error: "); Serial.println(result, HEX); } delay(1000);
}
此代码示例演示了如何使用ModbusMaster库控制MAX485的发送/接收模式,并读取Modbus数据。
Python代码 (树莓派):
树莓派上的Python脚本负责从RS485接口(通过HAT或USB转换器,或从RS485转WiFi模块的网络端口)读取数据,并可选择通过MQTT发布。
以下是一个使用pymodbus作为Modbus RTU主站轮询数据,并使用paho-mqtt发布数据的概念性Python脚本:
Pythonimport time
from pymodbus.client import ModbusSerialClient as ModbusClient \# For RTU
\# from pymodbus.client import ModbusTcpClient as ModbusClient \# For TCP if using RS485-to-WiFi in TCP mode
import paho.mqtt.client as mqtt
import json\# Modbus RTU (Serial) Configuration
SERIAL\_PORT \= "/dev/ttyUSB0" \# Or /dev/ttyAMA0, /dev/ttyS0 for HATs, check your RPi config
BAUD\_RATE \= 9600
SLAVE\_ID \= 1 \# Machine tool Modbus slave ID\# MQTT Configuration
MQTT\_BROKER\_HOST \= "your\_mqtt\_broker\_address"
MQTT\_BROKER\_PORT \= 1883
MQTT\_TOPIC \= "machinetool/data"\# Initialize Modbus Client
\# For Modbus RTU via serial (USB adapter or HAT)
modbus\_client \= ModbusClient(method='rtu', port=SERIAL\_PORT, baudrate=BAUD\_RATE, timeout=1)
\# For Modbus TCP (if RS485-to-WiFi module acts as a TCP server)
\# modbus\_client \= ModbusClient(host='ip\_of\_rs485\_wifi\_module', port=502)\# Initialize MQTT Client
mqtt\_client \= mqtt.Client("raspberry\_pi\_data\_logger")
try: mqtt\_client.connect(MQTT\_BROKER\_HOST, MQTT\_BROKER\_PORT, 60) mqtt\_client.loop\_start() \# Start a background thread for MQTT print("Connected to MQTT Broker")
except Exception as e: print(f"Error connecting to MQTT Broker: {e}") \# Handle connection error appropriatelydef read\_machine\_data(): if not modbus\_client.connect(): print("Unable to connect to Modbus slave") return Nonetry: \# Example: Read 2 holding registers starting from address 0 \# Adjust register address and count based on your machine tool's Modbus map rr \= modbus\_client.read\_holding\_registers(address=0, count=2, unit=SLAVE\_ID)if rr.isError(): print(f"Modbus Error: {rr}") return None else: \# Assuming data is a list of register values data\_payload \= { "timestamp": time.time(), "register\_0": rr.registers, "register\_1": rr.registers \# Add more registers as needed } return data\_payload except Exception as e: print(f"Error reading Modbus data: {e}") return None finally: modbus\_client.close()if \_\_name\_\_ \== "\_\_main\_\_": while True: machine\_data \= read\_machine\_data() if machine\_data: try: payload\_json \= json.dumps(machine\_data) mqtt\_client.publish(MQTT\_TOPIC, payload\_json) print(f"Published to MQTT: {payload\_json}") except Exception as e: print(f"Error publishing to MQTT: {e}")time.sleep(5) \# Adjust polling interval as needed
该脚本展示了如何配置Modbus客户端,读取数据,然后将其格式化为JSON并通过MQTT发布。实际应用中需包含更完善的错误处理和数据记录逻辑。
1.1.4. 应对旧设备改造挑战
将老旧设备接入网络并非没有挑战。首先,不同机床可能存在RS485实现的差异、不完整的Modbus寄存器映射表,甚至使用专有协议,这要求在改造前仔细查阅设备文档或进行逆向工程。其次,从机床获取的原始数据往往需要进行转换和标准化才能被上层应用理解和使用。工业现场的粉尘、震动和电磁干扰等环境因素也对硬件的选型和封装提出了要求。此外,虽然单个采集单元成本低廉,但将方案扩展到大量设备时,需要考虑网络基础设施的承载能力和数据管理平台的构建。最后,将原本隔离的设备接入网络会引入新的安全风险,必须实施基本的网络安全措施,如网络分段和强密码策略。成功的数据采集项目,即使是低成本的,也往往能揭示生产瓶颈,从而为更广泛、更深入的自动化改造提供信心和数据支持,成为企业数字化转型的重要起点。
1.2. 设备互联的战略价值
设备联网采集的数据具有巨大的战略价值。它可以用于实时监控设备综合效率(OEE),为预测性维护提供数据基础,从而减少非计划停机。通过分析生产数据,可以优化工艺参数,提升产品质量和生产效率。此外,对设备能耗的精确实时监控,也有助于发现节能潜力,降低运营成本。这些价值最终都将体现在投资回报率上,并推动企业向更智能的制造模式转型。
2. 智能AGV车队协同优化物流效率
自动化导引车(AGV)是现代制造和物流系统中常见的自动化元素。本章节将探讨如何提升AGV车队的运行效率,重点关注用户提出的基于Levenshtein距离的多车路径规划与碰撞避免,并在ROS(机器人操作系统)和Gazebo仿真环境中进行阐释。
2.1. 基于Levenshtein距离分析增强多AGV路径规划
2.1.1. Levenshtein距离:原理及其在轨迹比较中的应用
Levenshtein距离,也称为编辑距离,是一种衡量两个序列(通常是字符串)之间差异的度量标准。它定义为将一个字符串转换为另一个字符串所需的最少单字符编辑操作(插入、删除或替换)次数。其计算通常采用动态规划方法。
要将Levenshtein距离应用于机器人轨迹或路径,首先需要将路径表示为序列。ROS中的nav_msgs/Path消息本身就是一系列位姿(位置和姿态)的序列。为了应用字符串度量,这些连续的路径数据可以被离散化或抽象化为字符或符号序列。例如,可以将AGV访问过的栅格单元ID(如A1, B1, B2, C2…)或一系列动作(如前进、左转、前进…)作为序列的元素。
一旦路径被表示为序列,Levenshtein距离便可用于:
- 路径相似性/差异性比较: 量化计划路径与实际执行路径之间的差异,或比较两条备选计划路径的相似度。
- 轨迹分析/聚类: 对AGV的历史轨迹进行聚类,以分析常见的行为模式或从演示中学习。
- 手势/模式识别: 识别路径中重复出现的模式或特定"手势"。
然而,必须明确的是,Levenshtein距离主要是一种用于序列的分析工具,它本身并非一种用于在具有障碍物和运动学约束的动态环境中进行几何路径规划的算法。它不直接理解空间关系、障碍物信息或机器人的动力学特性。这一点与A*、D*、DWA等成熟的路径规划算法有本质区别。因此,Levenshtein距离在AGV路径规划中的角色更侧重于对已生成或已执行的路径进行分析、比较或评估,而不是直接生成导航路径。
2.1.2. ROS中的核心路径规划算法与碰撞避免
ROS导航栈是AGV实现自主导航的标准框架。它通常包含以下组件:
- 全局路径规划器: 如A*算法或Dijkstra算法,负责在已知地图上找到从起点到目标点的最优或次优路径。这些算法通常基于启发式搜索和成本函数进行路径搜索。
- 局部路径规划器: 如动态窗口法(DWA)或时间弹性带(TEB)算法,负责根据机器人当前的运动学和动力学约束,在全局路径的指引下,进行实时的障碍物规避和运动控制。
在多AGV系统中,路径协调和碰撞避免是核心挑战。常见的策略包括:
- 集中式与分布式控制: 集中式调度器统一规划所有AGV路径,分布式则由各AGV自行协商。
- 基于规则或协商的机制: 例如,定义交通规则(如交叉口先行权),或让AGV通过通信协商避让策略。
- 速度障碍法(Velocity Obstacles): 一种几何方法,用于预测未来可能发生的碰撞并调整速度以避免。
- 深度强化学习(DRL): 训练智能体学习在复杂环境中导航和避障的策略。
- 多智能体路径寻找(MAPF)求解器: 如基于冲突的搜索(CBS)、增强型CBS(ECBS)、基于优先级的规划等,这些算法专门解决多智能体环境下的无冲突路径规划问题,并已有ROS实现。
下表简要对比了AGV路径规划中常用算法及分析技术:
表2:AGV路径规划算法与分析技术对比
| 算法/技术 | 类型 | AGV中的主要用途 | 优点 | 缺点 | ROS实现说明 |
|---|---|---|---|---|---|
| A* | 全局规划器 | 在静态地图中寻找最优(或次优)路径 | 完备性,最优性(若启发函数可采纳) | 计算量随地图规模增加较快,不直接处理动态障碍 | ROS Navigation Stack中常用,如global_planner |
| DWA | 局部规划器 | 实时避障,速度控制,遵循全局路径 | 考虑机器人运动学/动力学,实时性好 | 可能陷入局部最优,对传感器噪声敏感 | ROS Navigation Stack中常用,如dwa_local_planner |
| TEB | 局部规划器 | 实时路径优化,避障,考虑时间、路径平滑度 | 路径质量较高,能处理动态障碍 | 计算复杂度相对较高 | ROS Navigation Stack中常用,如teb_local_planner |
| Levenshtein 距离 | 序列分析工具 | 比较路径相似性,评估规划器性能,轨迹模式识别 | 量化序列差异,概念简单 | 不直接用于路径生成,结果依赖路径的序列化表示,计算复杂度O(mn) | 可通过自定义ROS节点实现路径数据采集和分析 |
| DTW (动态时间规整) | 序列分析工具 | 比较具有不同时间尺度的轨迹序列的相似性 | 能处理序列在时间轴上的伸缩和偏移 | 计算复杂度较高,同样不直接用于路径生成 | 类似Levenshtein,需自定义实现 |
此表清晰地指出了不同算法的角色,并将Levenshtein距离定位为一种分析工具,而非主要的几何路径规划器。
2.1.3. 在ROS/Gazebo中集成Levenshtein分析进行路径优化
用户查询中提到"AGV调度优化…Levenshtein距离算法的多车路径规划"。这里需要澄清,Levenshtein距离并非直接用于规划路径,而是用于分析已规划或已执行的路径,或评估调度器性能。其集成的价值在于提供一种量化比较路径特征的手段。
集成思路与应用场景:
- 评估路径规划器性能: 全局规划器(如A*)生成路径后,AGV在局部规划器(如DWA)的控制下实际执行。由于局部避障或未预见的障碍物,实际路径可能偏离计划路径。通过将计划路径和实际执行路径都转换为序列,Levenshtein距离可以量化这种偏差。该指标有助于调整规划器参数或识别规划器在特定区域的不足。
- 比较备选高级路径: 如果调度系统为AGV生成了多条可能的高级路径(例如,一系列区域或关键路标点),Levenshtein距离可以用来比较这些抽象路径与某条首选路径或历史路径的相似性或差异性。
- 车队行为异常检测: 长期收集多个AGV的路径序列数据,并利用聚类算法对这些序列进行分组。Levenshtein距离可以作为聚类算法中的距离度量,帮助识别正常的路径模式与异常的路径模式。
- 从演示中学习(LfD): 如果由人类操作员手动引导AGV沿最优路径行驶,这些演示路径可以被记录为"黄金标准"序列。新规划的自主路径可以通过Levenshtein距离与这些标准序列进行比较,以评估其质量。
在ROS/Gazebo中的实现:
- 数据采集: 在ROS中,可以订阅发布nav_msgs/Path类型消息的话题,以获取AGV的计划路径和(通过里程计和传感器融合估计的)实际路径。
- 路径序列化: 开发一个ROS节点(Python或C++),该节点负责:
- 将nav_msgs/Path消息转换为简化的符号序列。路径序列化是应用Levenshtein距离的关键步骤,其"字母表"的定义直接影响分析结果的意义。例如,可以将连续的(x,y)坐标离散化到栅格单元,并使用单元ID序列化路径;或者,可以识别路径中的关键转折点或路段类型(如直线、左转、右转、停止)并将其编码为符号。
- 实现Levenshtein距离算法本身。
- 发布计算得到的Levenshtein距离分数或其他分析结果,供进一步处理或可视化。
- Gazebo仿真演示: Gazebo是进行多AGV仿真的理想平台。用户查询中要求的"Gazebo仿真动图演示"应着重展示这一分析层面:例如,演示AGV在模拟环境中导航,其路径数据被实时记录和序列化,然后一个独立的分析模块(或RVIz插件)显示不同路径之间的Levenshtein相似度分数,或者高亮显示与参考路径偏差较大的路径段。
2.1.4. 仿真与实践考量
- "字母表"定义的重要性: 如前所述,如何将几何路径转换为符号序列是核心问题。不同的序列化方法(基于栅格、基于动作原语、基于拓扑特征如转弯)会捕捉路径的不同方面,从而影响Levenshtein距离的解释。
- 计算成本: Levenshtein距离的时间复杂度为O(m×n),其中m和n是两个序列的长度。对于非常长且详细的路径序列,如果尝试在实时决策循环中使用,计算开销可能较大。因此,它更适用于离线分析或对抽象程度较高的路径进行分析。
- 距离值的解释: 原始的Levenshtein距离值需要结合上下文进行解释。通常,可以通过除以较长路径的长度将其归一化,得到一个更具可比性的相似度百分比。
- 替代度量: 对于路径比较,也存在其他度量方法。例如,动态时间规整(DTW)更适合比较具有时间维度伸缩的序列,而弗雷歇距离(Fréchet distance)则更侧重于几何形状的相似性。
表2.1:AGV路径规划算法综合比较
| 算法/技术 | 适用场景 | 优势 | 劣势 | 复杂度 | 实现难度 |
|---|---|---|---|---|---|
| A* | 静态环境全局规划 | 完备性,最优性,效率高 | 不适合高维空间 | O(b^d) | 中等 |
| D* Lite | 动态环境全局规划 | 增量计算,动态环境适应性 | 计算复杂度高 | O(k·log k) | 较高 |
| RRT | 高维空间规划 | 可处理复杂约束,随机探索 | 非最优,路径不平滑 | O(n log n) | 中等 |
| DWA | 局部避障 | 考虑车辆动力学 | 局部最优,需全局引导 | O(v·w·a·t) | 中等 |
| TEB | 时间优化轨迹 | 平滑轨迹,考虑时间约束 | 需精确建模,调参复杂 | O(n^3) | 高 |
| Levenshtein | 路径分析比较 | 量化序列相似度 | 非规划算法 | O(m·n) | 低 |
2.2. 评估高级AGV调度的影响
通过路径分析(包括基于Levenshtein距离的度量)获得的洞察,可以反过来指导和优化AGV的调度策略。一个更优化的调度系统能够带来多方面的好处:
- 减少车队内部的拥堵和死锁现象。
- 提高整体物料搬运的吞吐量。
- 降低单位任务的平均能耗。
- 使物料送达时间更加可预测和稳定。 这些改进最终将转化为运营效率的提升和投资回报率的增加。
表2.2: AGV任务优先级与分配策略对比
| 策略类型 | 原理 | 优势 | 劣势 | 适用场景 |
|---|---|---|---|---|
| FIFO (先进先出) | 按任务到达顺序分配 | 实现简单,公平性好 | 不考虑紧急度和效率 | 负载均衡,任务同质性高 |
| 最短路径优先 | 优先分配路径最短的任务 | 提高AGV利用率 | 可能导致远距离任务长时间等待 | 高密度作业区域 |
| 截止时间优先 | 按任务完成时限排序 | 保证时间敏感任务及时完成 | 可能牺牲整体效率 | JIT生产环境 |
| 加权综合评分 | 综合考虑多因素的加权得分 | 灵活平衡多种目标 | 调参复杂,需要经验 | 复杂混合生产环境 |
| 动态实时优化 | 基于当前系统状态实时调整 | 适应性强,效率最高 | 计算复杂度高,实现难度大 | 高度自动化智能工厂 |
3. 智能能耗管控:优化空压机系统效率
压缩空气是许多工厂中的重要能源,其生产成本在总运营支出中占有相当比重。本章节将详细阐述如何应用PID(比例-积分-微分)控制技术,对空压机组进行动态压力管理,以实现显著的节能效果。用户查询中特别提到了在食品厂实现23%的节电率目标,并要求提供相应的数学模型。
3.1. 基于PID的空压机组动态压力控制
3.1.1. PID控制在节能中的基本原理
PID控制器通过其三个核心组成部分——比例(P)、积分(I)和微分(D)——来调节控制回路,其目标是使过程变量(如系统压力)尽可能接近设定点,即误差(设定点 - 过程变量)最小化。
在空压机系统中应用PID控制的主要原因在于工厂的压缩空气需求通常是波动的。传统的控制方式,如简单的启停控制或基于固定压力带的级联控制,往往难以精确匹配实际需求,容易导致系统过压运行,从而浪费能源。PID控制器则能够更精细地调节空气供应,以响应需求变化。
动态压力带管理是PID控制实现节能的关键。通过PID调节,系统可以维持在一个更窄、且平均值更低的压力带运行。研究表明,供气压力每降低2 PSIG(约0.14 bar),大约可以节省1%的能源。
对于多台空压机组成的机组,PID控制通常是中央控制系统的一部分。该系统智能地决策各台空压机的启停、加载/卸载,并可能调节变频驱动(VSD)空压机的转速,以最高效的方式满足总需求。其目标是以最少的空压机运行在各自最高效的负载点。
**变频驱动(VSD)**在其中扮演重要角色。VSD空压机通常由PID回路控制,能够连续调节其输出量,从而在部分负载条件下实现高效运行,并有助于实现更精确的压力控制。
下表提供了一些空压机优化中PID调谐参数的示例性信息,帮助理解参数调整方向:
表3:空压机优化PID调谐参数示例
| 控制回路 | PID参数 | 典型范围/初始值建议 | 调谐考量/影响 |
|---|---|---|---|
| 主系统压力控制 | Kp | 根据系统响应速度和稳定性调整,可从较小值开始尝试 | 增加Kp提高响应速度,但过大会导致超调和振荡;需平衡快速性和稳定性 |
| Ki | 根据消除稳态误差的需求调整 | 增加Ki消除静差,但过大会导致积分饱和和振荡;用于补偿持续的负载扰动 | |
| Kd | 通常用于改善动态响应,预测误差变化趋势 | 增加Kd能减少超调,提高系统阻尼,但对噪声敏感,可能导致输出抖动 | |
| VSD空压机转速控制 | Kp | 类似主压力控制,但更关注转速平稳过渡 | 确保转速调节平滑,避免对电机和机械部件造成冲击 |
| Ki | 确保在不同负载下转速能精确达到目标值 | 消除因负载变化引起的转速偏差 | |
| Kd | 较少单独使用,通常与Kp, Ki配合以优化瞬态响应 | 帮助快速稳定转速,但需谨慎设置以防噪声放大 |
注:具体的PID参数值高度依赖于空压机型号、管网特性、负载模式等,上表仅为一般性指导。实际调谐需结合系统测试和经验。
3.1.2. 实现23%节能的数学模型探讨
用户查询要求提供一个能推导出23%节电率的数学模型。需要强调的是,由于节能效果受初始系统效率、负载特性、空压机类型、管网状况等多种因素影响,一个普适性的、能精确保证23%节能效果的数学模型难以建立。文献中提及的23%节能通常是在特定条件下,例如气动系统中的能量回收,或作为综合优化后的目标或成果。
然而,我们可以构建一个数学框架来分析PID控制如何作用于关键节能环节,并量化其潜在的节能贡献。节能主要通过以下途径实现:
- 降低平均系统供气压力。
- 最小化空压机的空载运行时间。
- 优化空压机组的启停顺序和负载分配(确保运行组合最高效)。
- 减少管网压力损失(虽然PID不直接修复,但稳定的低压运行有助于此)。
- 减少泄漏(稳定的低压运行能降低泄漏量)。
模型组件与推导思路:
- 空压机能耗特性: 每台空压机的功率消耗与其排气量(CFM或m3/min)和排气压力相关。这通常由制造商提供的性能曲线或通过实测数据建模得到。例如,功率Pcomp=f(Q,p),其中Q是流量,p是压力。
- PID控制逻辑: PID控制器的输出u(t)根据压力偏差e(t)=psetpoint−pactual计算: u(t)=Kpe(t)+Ki∫0te(τ)dτ+Kddtde(t) 。这个输出u(t)会转化为对空压机组的具体控制指令,如启停某台空压机、调节VSD空压机的输出频率(从而改变其排量和功耗)等。
- 系统空气需求模型: 工厂的压缩空气需求量Qdemand(t)随时间变化。这可以通过历史数据分析或实时监测获得。
- 能量消耗计算:
- 基准能耗 (Ebase): 在采用PID动态压力控制之前的原有控制策略下,根据需求曲线和当时的空压机运行模式计算出的总能耗。
- PID控制下能耗 (EPID): 模拟或计算在PID控制下,为满足相同的Qdemand(t),空压机组的运行状态(哪些空压机运行,各自负载率,系统平均压力等)及其对应的总能耗。PID控制通过更精确地匹配供需、降低平均压力、优化机组运行,理论上会使得EPID<Ebase。
- 节能率计算: 节能率(%)=EbaseEbase−EPID×100%
要达到如23%这样的显著节能效果,通常不仅仅依赖于PID参数的调优,更需要一个整体的系统优化方案,其中PID控制是实现动态响应和精确压力控制的核心工具。例如,文献中提到的空压机温度与压力的关系(理想气体状态方程相关推导)可用于更精细的效率分析。一些研究通过建立系统传递函数并采用模糊PID等智能控制方法,也取得了良好的节能效果。
PID参数(Kp,Ki,Kd)的正确整定对控制效果和节能潜力至关重要。不当的调谐可能导致系统振荡、响应缓慢甚至无法稳定在目标压力,反而增加能耗。
3.1.3. 案例研究:某食品厂空压机系统改造——实施与成果(合成分析)
尽管难以找到一个完美匹配"食品厂、空压机群PID控制、精确实现23%节能"的公开案例,但我们可以结合现有信息,勾勒出一个此类改造项目的典型过程和预期效益。
项目背景(假设):
某中型食品加工厂,拥有3台不同功率的螺杆式空压机,原有控制方式为简单的压力上下限启停和手动切换,导致系统平均压力偏高(例如,设定在7.5 barg,而实际末端用气点最低需求仅为6.0 barg),空压机频繁启停且存在较长的空载运行时间,能耗巨大。
改造方案:
- 引入中央智能控制系统: 该系统集成PID控制逻辑,对整个空压机组进行集中调度。
- 动态压力设定: 根据生产线的实时用气需求(可通过监测管网流量或关键用气设备的运行状态来感知),PID控制器动态调整系统的供气压力设定点,目标是将其维持在满足最远端、最高压力需求点要求的最低水平,例如从平均7.2 barg降至6.5 barg。
- 优化启停与加载策略:
- 控制器根据压力变化速率和当前压力,通过PID算法决定启动/停止哪几台空压机。
- 优先使用效率最高的空压机作为基载机,其他作为调峰机。
- 如果有机组中包含VSD空压机,PID输出会直接控制其转速,使其承担主要的负荷波动调节任务,保持系统压力稳定在极小的范围内(如±0.1 bar)。
- 目标是让运行的空压机尽可能处于其高效负载区,减少空载运行。
- 数据监测与分析: 系统持续监测各空压机的运行状态(加载/卸载、电流、排气压力、温度)、总管压力、流量等参数,为PID调优和效果评估提供数据。
预期成果(基于文献和原理推断):
- 显著节能:
- 通过降低平均供气压力,例如从7.2 barg降至6.5 barg(约降低10 PSIG),理论上可节能约5%。
- 通过优化启停和加载,大幅减少空载能耗(空载功耗可达满载的20-40%)。
- 如果结合VSD空压机的精细调节,避免固定转速空压机在部分负载下的低效运行。
- 综合以上措施,并假设原有系统效率较低、优化空间较大,实现15-25%的节能是可能的。要达到23%的目标,可能还需要配合管网泄漏治理、热能回收等其他措施。印尼某食品厂的空压机系统优化案例中,仅通过将压力从7.5 barg降至6.8 barg就实现了约4.2%的能耗降低,而更换和优化空压机运行则带来了数万美元的年节省。
- 压力稳定: 动态PID控制能提供更稳定的供气压力,改善用气设备性能。
- 设备寿命延长: 减少空压机不必要的启停次数和极端工况运行,有助于延长设备寿命,降低维护成本。
3.1.4. 先进控制策略与优化技术
传统的PID控制虽然有效,但在面对复杂、非线性和时变特性的空压机系统时,其性能可能受限。因此,学术界和工业界发展了多种先进控制策略以提升控制效果和节能潜力:
- 模糊PID / 智能PID (IPID): 结合模糊逻辑与PID控制,能够更好地处理系统的不确定性和非线性,提高控制器的自适应能力。
- 模型预测控制 (MPC): MPC利用系统的动态模型预测未来的行为,并通过优化算法在每个控制周期计算当前最优的控制输入。它可以处理多变量约束和优化目标,在空压机组协调控制中具有潜力。有时也与PID结合形成PID-MPC混合控制策略。
- 基于强化学习(RL)/深度强化学习(DRL)的PID调谐或直接控制: 利用RL算法在线学习或离线训练得到最优的PID参数或直接的控制策略,以适应不断变化的工况。
- 自整定PID / 自适应PID: 这类控制器能够根据系统性能指标自动调整其PID参数,以维持最优控制效果。
- 多参数协同调节算法模型: 一些先进的空压站节能系统采用综合考虑用气、产气、输送等多个环节的多参数协同调节模型,通过系统参数的自主寻优,实现供需压力的精确匹配和设备加载率的提高,从而达到深度节能的目的。
表3.2: 空压机高级控制策略对比
| 控制策略 | 工作原理 | 实现复杂度 | 优势 | 劣势 | 节能潜力 |
|---|---|---|---|---|---|
| 标准PID | 基于偏差的比例、积分、微分控制 | 低 | 简单可靠,参数调整直观 | 对非线性系统适应性有限 | 10-15% |
| 模糊PID | 结合模糊逻辑推理的PID控制 | 中 | 适应非线性特性,鲁棒性好 | 规则设计需要专业知识 | 15-20% |
| 模型预测控制 | 基于系统模型预测未来行为 | 高 | 可处理多变量和约束,预见性好 | 依赖准确模型,计算量大 | 20-25% |
| 自适应PID | 在线调整PID参数的控制策略 | 中 | 自动适应系统变化,维护性好 | 需要精心设计适应律 | 15-22% |
| 强化学习控制 | 通过与环境交互学习控制策略 | 高 | 无需精确模型,自主优化 | 训练周期长,可解释性差 | 20-28% |
| 多级联控制 | 多环路嵌套的层级控制结构 | 中 | 分层处理复杂系统,稳定性好 | 环路间相互影响,调试复杂 | 18-23% |
这些先进策略往往需要更复杂的建模和计算,但它们为应对空压机系统节能的挑战提供了更强大的工具。
3.2. 空压机优化的经济与环境效益
通过智能控制优化空压机系统的运行,不仅能带来可观的经济效益,主要体现在电费的显著降低,还能产生积极的环境影响。能源消耗的减少直接对应着碳排放的降低,有助于企业实现绿色可持续发展目标。此外,更平稳的运行状态和对设备的精细管理,能够减少设备磨损,延长其使用寿命,从而降低维护和更换成本,并提高系统的整体可靠性,减少因气压不稳或设备故障导致的生产中断。
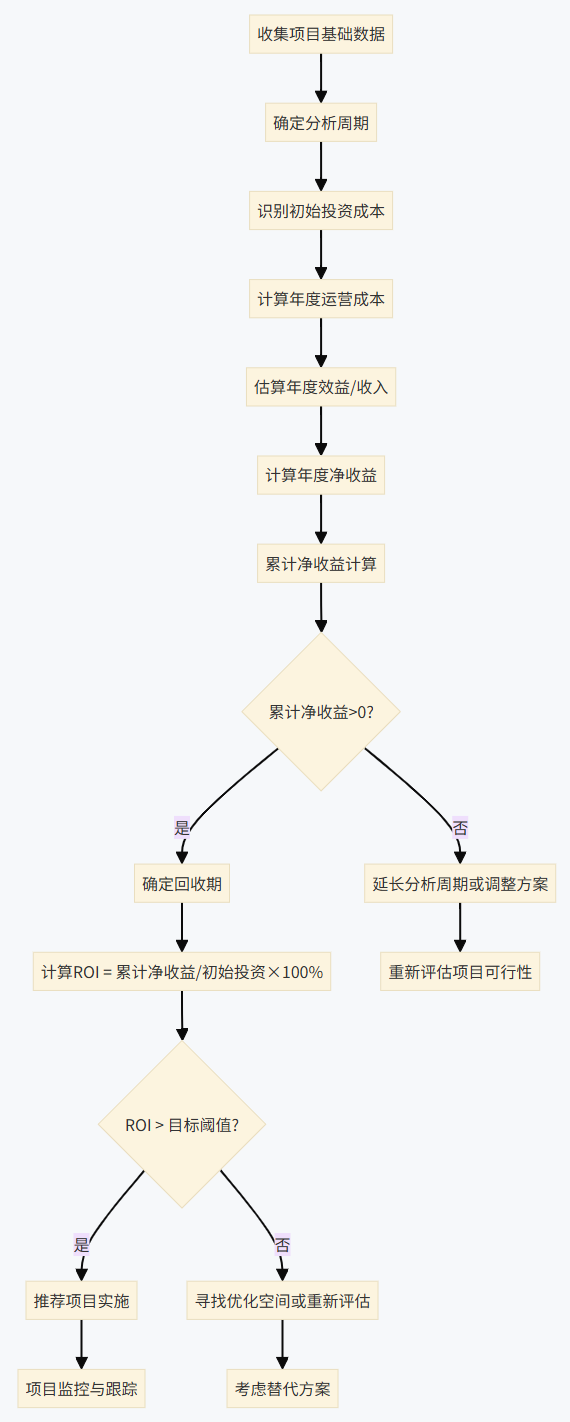
4. 自动化投资的论证:实用的ROI框架
对于负责推动自动化项目的技术经理和工程领导而言,清晰地量化项目的经济效益并构建有说服力的投资回报(ROI)分析至关重要。本章节旨在提供一个实用的ROI计算框架,并重点关注用户提出的几个关键变量:设备折旧、量化的能源节省以及政府补贴。同时,将提供一个可供下载和使用的Excel模板的结构和使用说明。
4.1. 构建全面的自动化项目ROI计算器
4.1.1. 基本输入变量:成本、效益与时间线
一个全面的ROI分析始于对项目相关的各项成本和预期效益的细致梳理。
成本因素:
- 初始投资成本: 这包括自动化设备的采购费用、软件许可费、安装调试费、系统集成费用以及初期的员工培训费用。
- 持续运营成本: 项目投入运营后,会产生维护保养费、备品备件费、可能的软件订阅费、新增的能耗(如果自动化设备本身能耗较高,而非节能型改造)以及后续的员工再培训费用等。
效益因素(可量化):
- 人力成本节省: 自动化替代人工操作,可以减少直接人工工时,或将员工从重复性、低价值工作中解放出来,重新分配到更高价值的岗位。
- 生产效率提升: 自动化设备通常能实现更高的生产速度、更短的生产周期,从而提高整体产量和吞吐量。
- 质量改进: 自动化操作的一致性和精确性有助于减少生产过程中的缺陷品、废品和返工,从而降低相关的物料和人工损失。
- 能源节省: 这是本文重点关注的效益之一,具体量化方法见后述。
- 物料节省: 精确控制和优化工艺可以减少原材料的浪费。
- 空间节省: 自动化设备(如高密度存储系统、紧凑型机器人单元)可能比传统人工操作占用更少的厂房面积,从而节约宝贵的空间资源或避免扩建成本。
时间线:
明确定义ROI分析的周期至关重要,例如,项目投入后的1年、3年或5年。不同周期的ROI结果可以反映投资的短期和长期回报情况。
间接/无形效益:
虽然难以直接用货币量化并纳入Excel计算,但也应在ROI中定性提及,例如:改善工作环境的安全性与人机工程学、提升员工士气、增强生产柔性、提高数据采集能力与决策质量、以及因质量提升带来的品牌声誉增强等。这些因素虽然"软",但长期来看对企业的财务表现有"硬"影响,例如,工伤事故减少可以降低保险费用和赔偿支出,生产停机时间缩短则直接减少生产损失。
4.1.2. 计算设备折旧(方法:直线法等)
设备折旧是一项非现金支出,它反映了固定资产(如自动化设备)因使用、磨损或技术过时而导致的价值逐渐减少的过程。在进行全面的财务分析(如计算总拥有成本TCO)和税务规划时,折旧是一个必须考虑的因素。
常用折旧计算方法:
- 直线法 (Straight-Line Method): 这是最简单且最常用的折旧方法。其计算公式为: 年折旧费用=预计使用年限资产原值−预计净残值 例如,一台自动化设备原值为100,000元,预计使用寿命为5年,预计净残值为10,000元,则年折旧费用为 (100,000 - 10,000) / 5 = 18,000元。
- 其他方法: 如双倍余额递减法(Declining Balance Method)或年数总和法(Sum-of-the-Years’-Digits, SYD),这些是加速折旧法,在资产使用早期确认较高的折旧费用。对于ROI估算,直线法通常已足够。
在Excel模板中输入的折旧相关参数: 资产原值、预计净残值、预计使用年限。
下表对比了几种常见的设备折旧计算方法:
表4:设备折旧计算方法对比
| 方法名称 | 计算公式概要 | 复杂度 | 常见用途 | 对早/末期费用的影响 |
|---|---|---|---|---|
| 直线法 | (原值 - 残值) / 使用年限 | 简单 | 多数固定资产,ROI估算 | 每年费用固定 |
| 双倍余额递减法 | 年初账面净值 × (2 / 使用年限) | 中等 | 希望早期多提折旧以递延税款的情况 | 早期费用高,后期费用低 |
| 年数总和法 | (原值 - 残值) × (剩余使用年限 / 年数总和) | 中等 | 类似双倍余额递减法,加速折旧 | 早期费用高,后期费用低(递减速度较缓) |
了解不同的折旧方法有助于企业根据自身会计政策和财务策略进行更精细的成本核算。
4.1.3. 量化能源节省作为有形效益
能源节省是许多自动化项目(尤其是本文中讨论的空压机系统改造)的核心经济驱动力之一。其量化方法如下:
- 建立基准能耗: 测量或估算待改造或被自动化替代的现有流程/设备的当前能耗。例如,记录空压机组改造前一周的总用电量(kWh)。
- 估算自动化后台账: 根据新设备的能效规格、新的控制策略(如PID控制)或操作模式的改变,估算改造后的能耗。例如,基于PID控制下的模拟运行结果,预测空压机组的年节电量。
- 计算节能数量: 两者之差即为节能数量(例如,kWh/年)。
- 货币化节能价值: 将节能数量乘以当前的能源单价(例如,元/kWh),得到年度节能金额。
示例(源自空压机章节): 若PID控制使空压机组年节约用电 X kWh,当地工业电价为 Y 元/kWh,则年度节能金额为 X×Y 元。
在Excel模板中设置的输入字段: 基准期单位能耗、项目实施后单位能耗、单位能源价格、年产量或运行小时数等,以便计算年度总节能额。
自动化设备通常比人工操作更节能,例如现代机器人和高效电机本身设计就注重能效,并且可以在空闲时自动降低功率消耗。对于空压机系统,如前所述,通过PID动态调压,每降低2 PSIG压力约可节能1%。这些具体的节能机制和数据应被纳入ROI计算的效益部分。
4.1.4. 整合政府补贴与激励政策
政府为鼓励企业进行技术改造、节能减排或推动特定产业发展,常会推出各种形式的补贴和税收优惠政策。这些政策能显著降低自动化项目的净初始投资,或直接增加项目初期的现金流入,从而大幅提升ROI,甚至可能使一些原本边际效益的项目变得具有吸引力。
常见的补贴/激励类型:
- 投资税抵免(ITC): 例如,购买符合特定标准的节能设备或研发投入,可按一定比例抵扣企业所得税。
- 财政补贴/拨款: 直接的资金支持,用于购买设备、支付研发费用或员工培训。
- 加速折旧: 允许企业在资产使用早期提取更多的折旧,从而在短期内减少应纳税所得额。
- 节能奖励/退税: 对于实现特定节能目标的项目,政府可能给予一次性奖励或税收返还。
在Excel模板中的处理方式:
- 方法一(减少初始投资): 将获得的补贴总额从"总初始投资成本"中扣除,计算基于净投资额的ROI。这是最直接反映补贴对投资门槛影响的方式。
- 方法二(计为首年效益): 将补贴金额列为项目第一年的独立正向现金流(收益项)。
在模板中应明确说明所采用的处理方法,并建议用户积极查询适用于其所在地区和行业的最新补贴政策。
表4.1: 自动化项目ROI计算要素表
| 类别 | 计算要素 | 数据来源 | 计算方法 | 影响因素 |
|---|---|---|---|---|
| 成本 | 初始设备投资 | 供应商报价 | 直接汇总 | 设备规格、数量、谈判折扣 |
| 安装与调试 | 工程报价 | 人工+材料+管理费 | 复杂度、现场条件 | |
| 培训费用 | HR/培训部门 | 课时×单价+场地费 | 培训规模、内外训 | |
| 年度维护 | 历史数据/供应商 | 设备价值×维保率 | 设备类型、使用环境 | |
| 收益 | 人力节省 | 生产数据 | 减少人数×年薪 | 自动化程度、工资水平 |
| 产能提升 | 生产数据 | 增加产量×边际利润 | 设备利用率、市场需求 | |
| 质量改进 | 质量部门 | 减少废品率×产品成本 | 产品特性、原始良率 | |
| 能源节省 | 能源数据 | 节省量×单价 | 能源价格、使用效率 | |
| 财务指标 | 投资回收期 | ROI计算 | 初始投资÷年净收益 | 现金流稳定性 |
| ROI百分比 | ROI计算 | 累计净收益÷初始投资 | 分析周期长度 | |
| NPV | 财务部门 | 现金流贴现合计 | 贴现率、项目风险 |
4.2. 分步指南:使用Excel ROI模板
以下是一个典型的多页Excel ROI计算器模板的结构和使用说明,旨在帮助用户系统地完成自动化项目的经济效益分析。
- Sheet 1: ROI汇总页 (ROI Summary Page)
- 内容: 集中展示核心ROI计算结果,如图表和关键指标。
- 关键输出指标:
- 项目总投资
- 各年度净收益(或亏损)
- 累计净收益(或亏损)
- 投资回报率 (ROI %) (例如,3年期ROI, 5年期ROI)
- 投资回收期 (Payback Period, 年)
- 通常会以表格形式展示未来3-5年(或更长,取决于项目性质)的逐年和累计财务表现。
- Sheet 2: 输入假设与参数 (Input Assumptions / Rates)
- 内容: 定义计算中使用的通用参数和费率。
- 示例输入项:
- 各类人员的平均小时工资率(用于计算人力成本节省)
- 能源单价(如 元/kWh,用于计算能源节省)
- 贴现率(Discount Rate,如果进行NPV或IRR等高级分析时使用)
- 项目分析周期(年)
- Sheet 3: 实施成本 (Implementation Costs)
- 内容: 详细列出项目实施阶段所有的一次性投入成本。
- 示例成本项(可分项列出并汇总):
- 硬件设备采购成本
- 软件许可与开发成本
- 安装与集成费用(内部人工时数 × 费率 + 外部服务费)
- 员工培训费用
- 厂房改造或配套设施费用
- 项目管理与咨询费用
- 预备费/应急费用(Contingency)
- Sheet 4: 年度运营效益与成本 (Annual Benefits & Operational Costs)
- 内容: 估算项目投入运营后,每年的可量化经济效益和新增(或减少的)运营成本。
- 年度效益项(示例):
- 人力成本节省额 = (原人工时数 - 现人工时数) × 平均小时工资率 × 年工作小时数
- 能源节省额 = (原年能耗 - 现年能耗) × 能源单价
- 物料节省额 = (原年物料消耗 - 现年物料消耗) × 物料单价
- 质量改进带来的节省 = (废品率降低 × 产量 × 单位产品成本) + (返工减少工时 × 工资率)
- 产量提升带来的额外利润 = 新增产量 × 单位产品边际利润
- 政府补贴(如果作为年度收益处理)
- 年度新增运营成本项(示例):
- 设备年度维护保养费
- 软件年度订阅/支持费
- 新增操作人员工资(如果需要)
- 备品备件消耗
- Sheet 5: 折旧计划表 (Depreciation Schedule) (可选,若需详细计算)
- 内容: 根据选择的折旧方法(如直线法),计算每年的折旧费用。
- 输入: 资产原值、预计净残值、使用年限。
- 输出: 年度折旧额。
Excel中的核心计算公式:
- 年度净收益 (Net Annual Benefit): 年度总效益 - 年度新增运营成本
- 投资回报率 (ROI %): ((累计净收益_在分析期末 / 总初始投资成本) * 100) 或者,更常见的逐年ROI(基于当期收益与初始投资的关系,但累计ROI更有意义): ((某年净收益 - (总初始投资成本 / 分析年限 – 若考虑分摊投资)) / (总初始投资成本 / 分析年限)) * 100 最简洁的ROI公式(通常指项目生命周期或特定年限结束后的总ROI): ROI = ((总收益 - 总成本) / 总成本) * 100
- 投资回收期 (Payback Period): 通过计算累计净收益何时由负转正(即收回初始投资)的年份。例如,如果初始投资为I,第1年净收益B1,第2年净收益B2… 则回收期是使得 B1 + B2 +… + Bn >= I 的最小n值。
下表为ROI计算器汇总页的一个简化示例输出,展示了关键财务指标随时间的变化:
表5:自动化项目ROI汇总表示例 (简化)
| 关键指标 | 单位 | 第0年 (投资期) | 第1年 | 第2年 | 第3年 |
|---|---|---|---|---|---|
| 成本 | |||||
| 总初始投资 | 元 | -150,000 | |||
| 其中:政府补贴 | 元 | (20,000) | |||
| 净初始投资 | 元 | -130,000 | |||
| 年度运营成本(自动化后) | 元 | 10,000 | 10,000 | 10,000 | |
| 年度折旧费用 | 元 | 26,000 | 26,000 | 26,000 | |
| 效益 | |||||
| 年度运营节省(人力、物料等) | 元 | 60,000 | 65,000 | 70,000 | |
| 年度能源节省 | 元 | 15,000 | 16,000 | 17,000 | |
| 财务表现 | |||||
| 年度税前净收益 | 元 | 39,000 | 45,000 | 51,000 | |
| 累计税前净收益 | 元 | -130,000 | -91,000 | -46,000 | 5,000 |
| 投资回报率 (ROI %) | % | 3.8% (3年累计) | |||
| 投资回收期 | 年 | 约2.9年 |
注:此表示例为简化版,实际模板会更详细。年度税前净收益 = (年度运营节省 + 年度能源节省) - 年度运营成本 - 年度折旧费用。ROI和回收期基于累计税前净收益和净初始投资计算。
这个表格直观地展示了项目的财务可行性,是向决策层汇报的关键部分。
ROI计算核心公式说明
| 计算指标 | 计算公式 | 使用说明 | 判断标准 |
|---|---|---|---|
| 年度净收益 | 年度总效益 - 年度运营成本 - 年度折旧费用 | 每年单独计算,表示当年项目带来的净收益 | 正值表示当年盈利 |
| 累计净收益 | 所有年度净收益之和 | 滚动计算,显示项目累计创造的价值 | 由负转正的时点即为回收期 |
| 投资回报率(%) | (累计净收益/初始投资)×100% | 通常在预设周期结束时计算 | 高于企业预设阈值(如15%)即为可行 |
| 投资回收期(年) | 找出累计净收益首次≥初始投资的年份 | 精确计算可采用插值法 | 越短越好,通常要求<5年 |
| 净现值(NPV) | Σ[年度净收益/(1+r)^t] - 初始投资 | r为贴现率,t为年份 | 正值表示项目创造价值 |
| 内部收益率(IRR) | 使NPV=0时的贴现率r | 通过迭代计算求得 | 高于企业资金成本即可接受 |
表4.2: ROI敏感性分析 - 关键参数变化的影响
| 参数变化 | 参数描述 | 基准值 | 变化范围 | ROI变化幅度 | 敏感度评级 |
|---|---|---|---|---|---|
| 初始投资成本 | 设备购置与安装总成本 | 150,000元 | ±20% | -25%至+37% | 高 |
| 人工成本节省 | 人员减少或重新分配带来的节省 | 每年60,000元 | ±15% | -18%至+18% | 中 |
| 项目寿命 | 设备使用年限 | 5年 | -2年至+3年 | -45%至+35% | 高 |
| 能源成本 | 单位能源价格 | 0.8元/kWh | ±30% | -9%至+9% | 低 |
| 设备利用率 | 实际使用率vs理论最大值 | 70% | -15%至+20% | -20%至+25% | 中 |
| 维护成本 | 年度维护与更新支出 | 设备价值的4% | ±50% | -8%至+8% | 低 |
| 贴现率 | 资金时间价值计算比率 | 8% | 4%至12% | +12%至-10% | 中 |
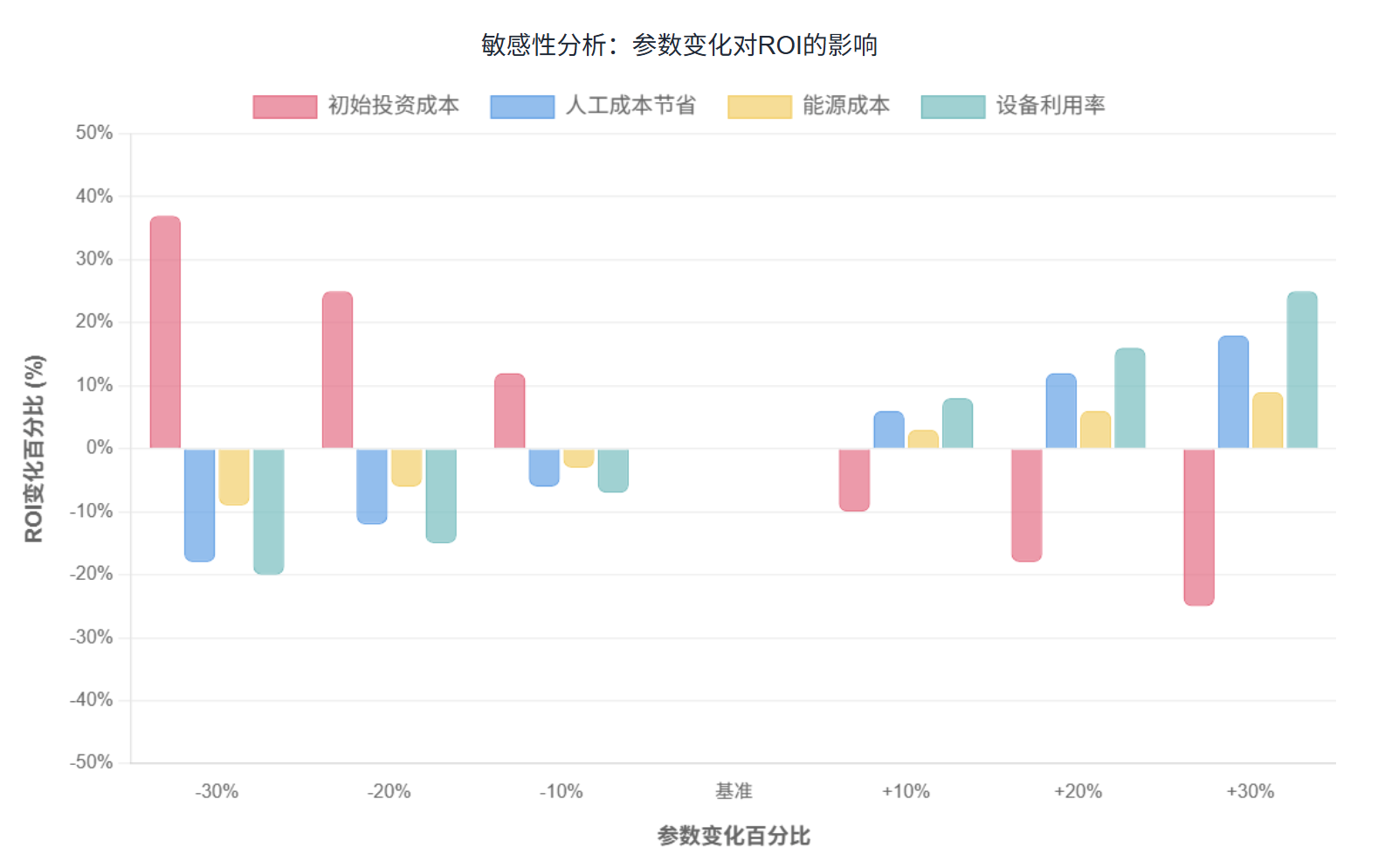
敏感性分析可以帮助决策者识别对项目ROI影响最大的因素,从而有针对性地制定风险管理策略。例如,上图显示初始投资成本和设备利用率的波动对ROI有较大影响,而能源成本的变化影响相对较小。这暗示企业应重点关注设备采购谈判和最大化设备运行效率。
4.3. 稳健经济效益分析的最佳实践
为确保ROI分析的准确性和可信度,应遵循以下最佳实践:
- 保持现实和保守的估计: 避免过度乐观地估计效益或低估成本。对关键参数进行合理范围的预测。
- 广泛征求意见: 涉及运营、财务、工程等多个部门的利益相关者,获取全面的输入和反馈,确保分析的全面性和可行性。
- 考虑总拥有成本 (TCO): 不应仅关注设备的前期采购价格,还应包括其整个生命周期内的运营、维护、升级、最终处置等所有相关成本。
- 进行敏感性分析: 分析关键假设(如人力成本增长率、能源价格波动、产量变化等)的变动对ROI结果的影响程度,以评估项目的风险承受能力。
- 正视无形效益: 即使某些效益(如员工满意度提升、企业形象改善)难以精确量化,也应在分析报告中作为辅助论证加以阐述,它们往往对长期成功至关重要。
- 明确分析范围与时间框架: 清晰界定ROI分析所包含的成本、效益类型以及评估的时间周期。
- 实施后跟踪实际绩效: 项目上线后,持续跟踪其实际运营数据,并与ROI分析中的预测值进行对比。这不仅能验证分析的准确性,也能为未来类似项目的决策提供经验教训。
- 建立清晰的业务案例: ROI计算本身是技术性的,但其最终目的是支持商业决策。因此,分析结果应被清晰、有说服力地呈现,突出项目如何服务于企业的战略目标。
遵循这些实践,可以使ROI分析不仅是一个数学计算过程,更是一个有效的战略决策和沟通工具。
5. 低成本自动化成功的战略路径
成功实施低成本自动化项目,不仅仅是选择和部署正确的技术,更需要一套行之有效的战略方法和管理原则。本章节将探讨实现这一目标的关键原则,并阐释前述四个技术锚点之间的协同效应。
5.1. 有效实施的关键原则
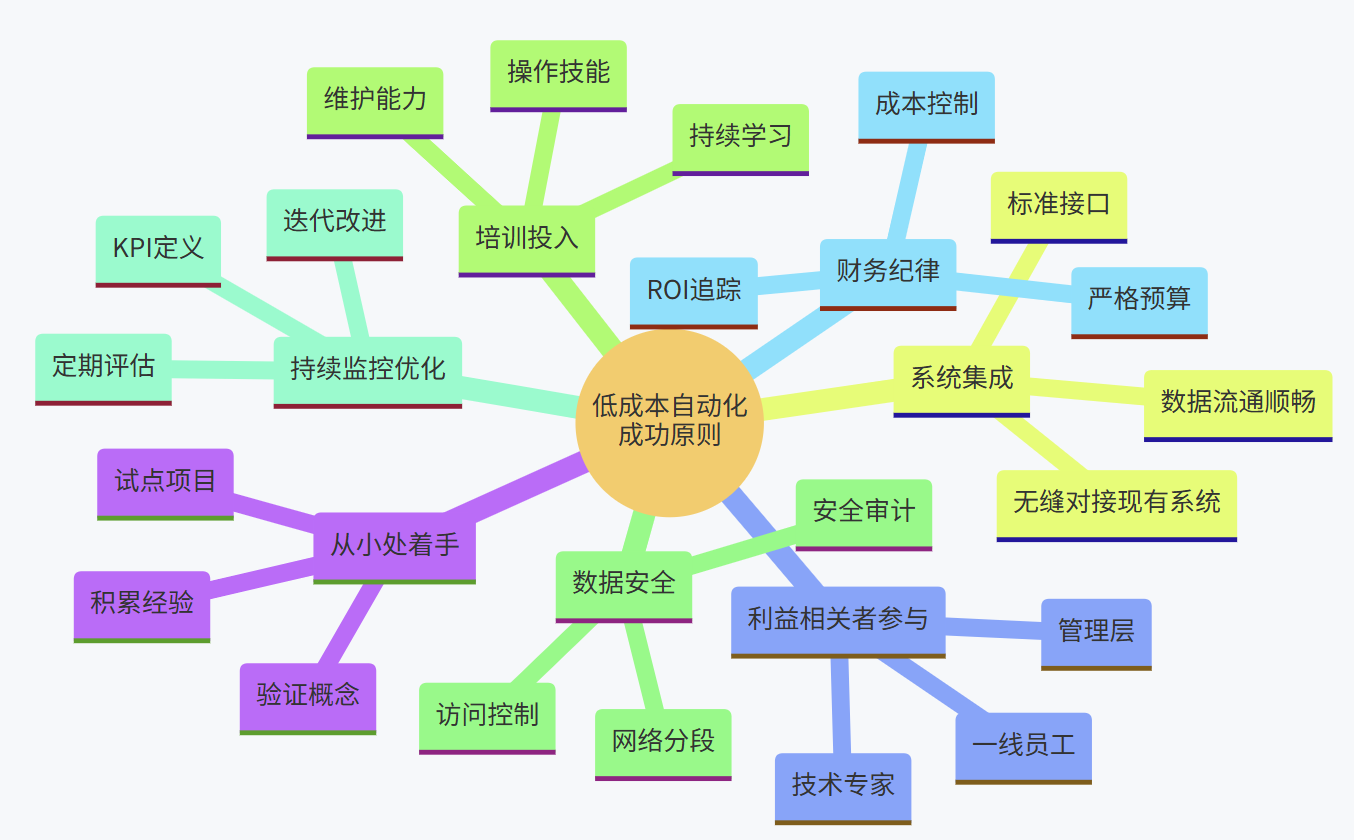
- 从小处着手,逐步扩展 (Start Small, Scale Gradually):
选择一两个试点项目来测试自动化概念,这有助于在早期识别并解决潜在问题,积累宝贵的实施经验。试点成功后,可以增强团队和管理层的信心,为后续在更大范围内推广自动化奠定基础。这种渐进式的方法与"低成本"理念高度契合,因为它最大限度地降低了初期风险和投入。 - 让利益相关者参与进来 (Involve Stakeholders):
从项目构思阶段开始,就应积极邀请各层级员工(尤其是直接受自动化影响的一线操作人员)和管理层参与。他们的早期介入有助于更深入地理解现有流程的痛点和细节,发现潜在的改进机会,减少因变革带来的抵触情绪,并提高最终方案的接受度和实施成功率。 - 关注系统集成 (Focus on Integration):
新的自动化解决方案应尽可能与企业现有的信息系统(如ERP、MES)和硬件设备无缝集成。良好的集成可以确保数据在不同系统间的一致性和流畅传递,打通信息孤岛,实现跨部门、跨功能区域的协同工作流程,减少人工数据转换和核对的工作量。 - 投资于培训 (Invest in Training):
自动化流程的引入往往伴随着新的工作方式和技能要求。为员工提供全面、持续的培训至关重要,这能确保他们理解如何操作、管理和维护新的自动化系统,减少过渡期间的错误和效率损失,并赋能员工识别更多潜在的自动化机会。 - 优先考虑数据安全 (Prioritize Data Security):
当原本孤立的设备(尤其是老旧设备)通过网络连接起来时,数据安全成为一个不容忽视的问题。必须实施必要的安全措施,如网络分段、强密码策略、访问控制、数据加密等,以保护敏感的生产数据和企业信息免遭未授权访问或网络攻击。 - 持续监控与优化 (Continuous Monitoring and Optimization):
自动化并非一劳永逸的"设置后就不用管"的投入。项目上线后,需要建立关键绩效指标(KPIs)体系,定期监控自动化流程的运行效果,收集用户反馈,识别瓶颈和改进空间,并根据业务需求的变化和新技术的发展,持续对自动化系统进行调整和优化。 - 财务纪律与严格追踪 (Financial Discipline and Rigorous Tracking):
任何转型项目,包括低成本自动化,都需要严格的财务管理和绩效追踪。这意味着在项目初期就要有清晰的预算和预期的ROI,在实施过程中要控制成本,在运营后要持续追踪实际效益,确保项目达到预期的财务目标。
这些原则的遵循,是确保低成本自动化项目不仅技术上可行,而且能在组织层面被成功接纳、高效运行并最终实现预期价值的关键。技术本身只是工具,而围绕技术的人员、流程和管理才是决定其成败的核心要素。
表5.1: 技术锚点协同效应矩阵
| 技术锚点 | 老旧设备联网 | AGV调度优化 | 空压机能耗管控 | ROI计算框架 |
|---|---|---|---|---|
| 老旧设备联网 | - | 提供物料需求数据 优化AGV任务分配 | 提供用气设备状态 优化压力控制 | 提供OEE改善数据 支持投资决策 |
| AGV调度优化 | 接收设备状态数据 智能规划路径 | - | 形成能耗优化目标 减少等待能耗 | 提供物流效率数据 量化投资回报 |
| 空压机能耗管控 | 接收生产计划数据 预测用气需求 | 与供能系统协同 平衡负载分布 | - | 提供能源节省数据 证明投资价值 |
| ROI计算框架 | 评估联网价值 引导投资方向 | 证明AGV经济性 优化车队规模 | 验证节能项目 优先级排序 | - |
5.2. 各技术锚点之间的协同效应
本文详细阐述的四个技术锚点——老旧设备联网、AGV调度优化、空压机智能能耗管控、以及ROI计算框架——并非孤立存在,它们之间可以产生显著的协同效应,共同推动企业的低成本自动化进程:
- 数据驱动的闭环优化:
- 通过**老旧设备联网(技术锚点一)采集到的实时生产数据(如设备状态、运行参数、能耗等),可以为空压机智能能耗管控(技术锚点三)**提供精确的用气需求信息,使得PID控制等策略能够更有效地动态调节压力,实现更优的节能效果。
- 同时,这些设备数据也是进行**ROI分析(技术锚点四)**的基础,例如,可以精确量化设备联网后带来的OEE提升、故障率下降等效益,从而更准确地评估自动化投资的价值。
- 物流效率与整体运营的关联:
- **AGV调度优化(技术锚点二)提升了内部物流效率,减少了物料等待时间,这直接影响到生产线的连续性和整体产出。其运行效率的提升(如减少空驶、缩短任务周期)所带来的成本节约和生产力提高,同样可以通过ROI框架(技术锚点四)**进行量化。
- AGV车队的能耗也可以被纳入**空压机(及其他能源)智能能耗管控(技术锚点三)**的范畴进行监测和优化,虽然AGV本身主要使用电池,但其充电策略和整体能源调度可以统一考虑。
- ROI框架的支撑作用:
- **ROI计算框架(技术锚点四)**是所有自动化项目(包括锚点一、二、三)立项和评估的通用工具。它为决策者提供了一个标准化的方法来衡量各项低成本自动化措施的经济可行性,确保有限的资源被投向回报最高的领域。
因此,企业在推进低成本自动化时,应采取整体视角,认识到这些技术锚点之间的内在联系。即使是分阶段、小范围地实施,也应规划好它们之间的接口和数据流,以便未来能够形成一个相互促进、协同增效的智能制造体系。例如,一个最初仅为满足基本数据采集而部署的低成本树莓派方案,如果设计时考虑到未来的扩展性(如数据格式标准化、MQTT接口预留),就能更容易地与后续的能源管理系统或更高级的分析平台集成。
对"低成本"理念的追求,不应导致在关键的支撑领域(如稳健的网络基础设施、必要的网络安全措施、充分的员工培训或有效的项目管理和集成)投入不足。这种"因小失大"的做法,可能会使原本具有潜力的低成本技术方案因为系统不稳定、数据不可靠或员工无法有效使用而最终无法实现预期的效益,甚至导致项目失败。因此,明智的"低成本"策略是在核心技术选型上追求性价比,同时确保对必要的使能环节进行合理的投入,以实现真正的价值最大化,而非仅仅追求绝对的最低初始价格。
6. 结论与未来展望
6.1. 总结核心要点
文章深入探讨低成本自动化改造的四个关键技术锚点,旨在为寻求通过经济高效方式提升运营水平的工业企业提供切实可行的指导。核心结论如下:
- 老旧设备联网:通过采用如树莓派结合RS485转WiFi模块等低成本方案,可以有效地从传统机床等设备中采集数据,为实现设备状态监控、OEE分析和预测性维护奠定基础。尽管初期硬件成本低廉,但企业需关注长期维护和数据标准化问题,以确保方案的持续有效性。
- AGV调度优化:Levenshtein距离等序列分析算法,虽然不直接用于AGV的几何路径规划,但可作为强大的分析工具,用于比较和评估AGV路径的相似性、偏差或行为模式。在ROS和Gazebo等成熟的机器人开发与仿真平台支持下,结合A*、DWA等核心规划算法,可以对AGV车队的调度策略进行优化,提升物流效率。关键在于如何将连续的路径数据有效地序列化以应用此类分析方法。
- 空压机智能能耗管控:PID控制及其高级变种(如模糊PID、自适应PID)是实现空压机组动态压力调节、精确匹配用气需求、从而显著降低能耗的核心技术。要实现如23%这样的高节能目标,通常需要结合VSD变频驱动、优化的机组启停策略、管网管理乃至热回收等系统性措施。数学模型应着重于阐释PID如何作用于节能杠杆,并量化其贡献。
- 实操性ROI计算:一个结构化、考虑全面的ROI计算框架(如Excel模板形式)对于论证自动化项目的经济可行性至关重要。该框架必须能够清晰地纳入初始投资、运营成本、设备折旧、量化的能源节省、人力成本节省以及政府补贴等关键变量,从而为决策提供坚实的财务依据。
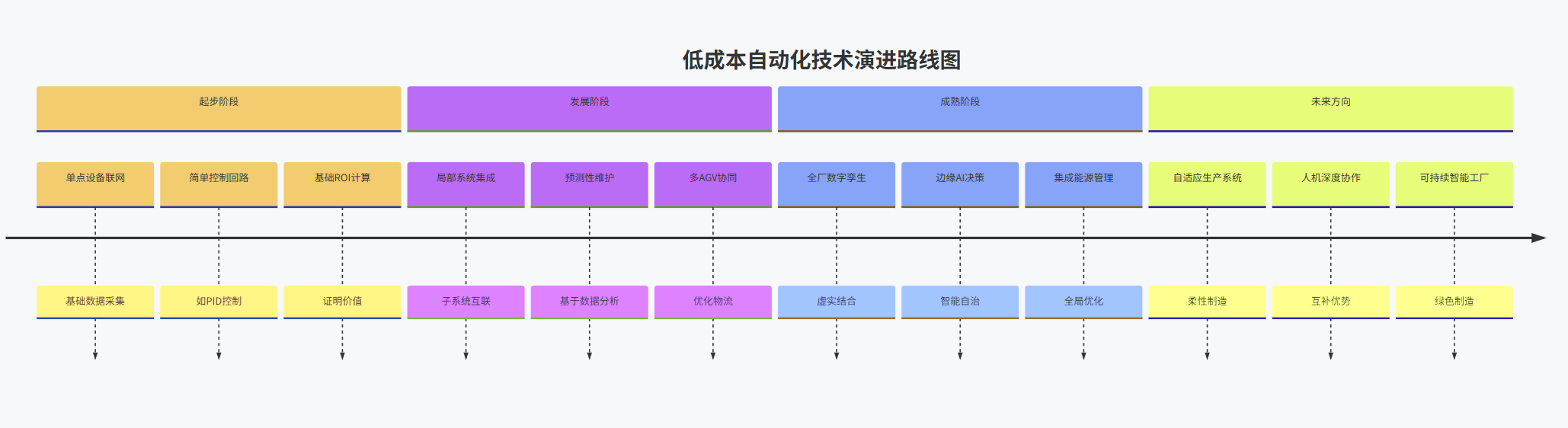
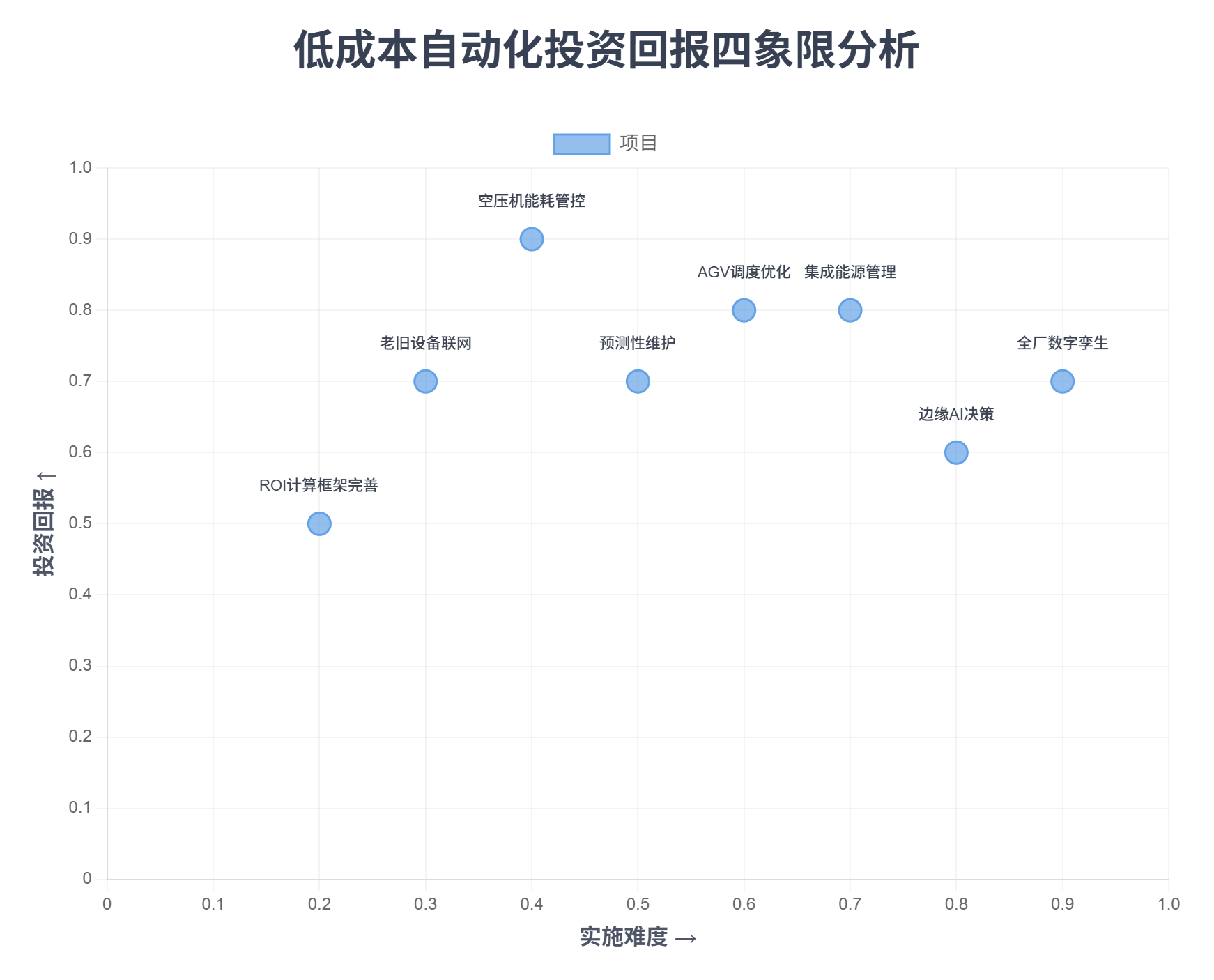
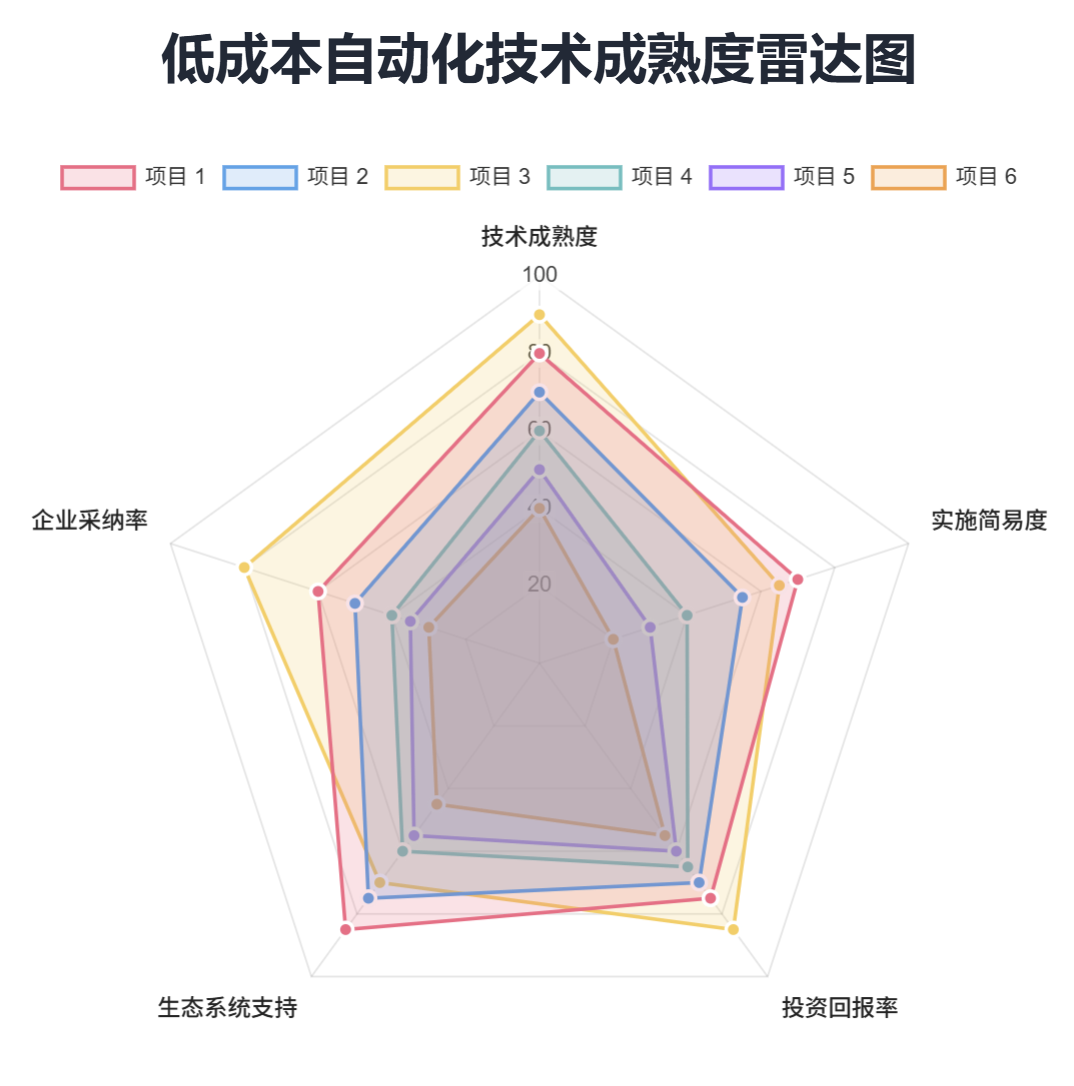
表6.1: 技术成熟度评估
| 技术方向 | 技术成熟度(1-10) | 部署难度(1-10) | 投资规模 | 回报周期 | 建议采纳时机 |
|---|---|---|---|---|---|
| 老旧设备联网 | 8 | 4 | 低-中 | 短期(1-2年) | 立即 |
| AGV路径优化 | 7 | 6 | 中 | 中期(1.5-3年) | 近期 |
| 空压机智能控制 | 9 | 5 | 低-中 | 短期(0.5-1.5年) | 立即 |
| 预测性维护 | 6 | 7 | 中 | 中期(2-3年) | 试点阶段 |
| 边缘计算AI | 5 | 8 | 中-高 | 中长期(2.5-4年) | 观望期 |
| 数字孪生 | 4 | 9 | 高 | 长期(3-5年) | 规划阶段 |
6.2. 渐进式智能自动化的力量
文章阐述的技术锚点共同揭示了一个重要趋势:企业无需进行大规模、高风险的巨额资本投入,即可通过一系列低成本、智能化的渐进式改造,逐步实现显著的运营改善和成本节约。利用如树莓派这样的开源硬件、ROS这样的开源软件平台,以及成熟的控制算法(如PID),使得先进的自动化技术不再是大型企业的专属。
这种渐进式的路径,尤其对于预算有限但期望通过技术创新提升竞争力的中小型企业(SMEs)而言,具有极大的吸引力和现实意义。它们可以从解决最紧迫的痛点(如设备数据黑箱、能耗过高)入手,通过小范围试点验证效益,然后逐步推广,积小胜为大胜。
6.3. 低成本工业自动化的新兴趋势与未来方向
展望未来,低成本工业自动化的发展将呈现以下趋势:
- 边缘计算与人工智能的普及: 更强大的边缘计算设备(可能仍保持低成本特性)将使得更复杂的人工智能算法(如机器视觉、预测性分析)能够直接在设备端或工厂层级署,实现更智能的本地化决策和响应。
- 机器人与自动化工具的进一步"民主化": 随着技术的进步和成本的持续下降,协作机器人、模块化自动化组件等将更加易于获取和集成,使得更多企业能够负担并应用机器人技术。
- 工业物联网(IIoT)安全性的增强: 随着越来越多低成本设备接入工业网络,针对这些系统的网络安全防护技术和意识将得到加强,以应对日益增长的安全威胁。
- 开源解决方案在工业领域的深化应用: 开源硬件(如各类微控制器板)、开源软件(如ROS、各类数据分析库)和开放标准将继续在降低自动化门槛、促进创新方面发挥关键作用。
- 可持续性成为核心驱动力: 低成本自动化带来的效率提升(如能源管理优化、物料消耗减少)与企业的可持续发展目标高度契合。未来,自动化方案的环境效益将与经济效益并重,成为项目评估的重要维度。正如一些领先企业通过智能能源管理实现成本降低和碳排放削减所展示的,自动化是推动绿色制造的关键使能技术。
6.4. 最终行动倡议
本文旨在启发并赋能工业领域的决策者和技术人员。我们鼓励读者深入审视自身企业的运营现状,积极识别那些可以应用本文所探讨的低成本自动化策略的环节和场景。通过明智地选择和实施这些技术锚点,企业不仅能够克服当前的运营挑战,更能为未来的持续增长和竞争力提升奠定坚实的基础。低成本自动化不仅是节约开支的手段,更是通往更智能、更高效、更可持续未来的战略路径。