python手写数字识别计分系统+CNN模型+YOLOv5模型 深度学习 计算机毕业设计(建议收藏)✅
博主介绍:✌全网粉丝10W+,前互联网大厂软件研发、集结硕博英豪成立软件开发工作室,专注于计算机相关专业项目实战6年之久,累计开发项目作品上万套。凭借丰富的经验与专业实力,已帮助成千上万的学生顺利毕业,选择我们,就是选择放心、选择安心毕业✌
> 🍅想要获取完整文章或者源码,或者代做,拉到文章底部即可与我联系了。🍅点击查看作者主页,了解更多项目!
🍅感兴趣的可以先收藏起来,点赞、关注不迷路,大家在毕设选题,项目以及论文编写等相关问题都可以给我留言咨询,希望帮助同学们顺利毕业 。🍅
1、毕业设计:2026年计算机专业毕业设计选题汇总(建议收藏)✅
2、最全计算机专业毕业设计选题大全(建议收藏)✅
1、项目介绍
技术栈:
Python语言、pytorch、CNN模型、YOLOv5模型、pyqt
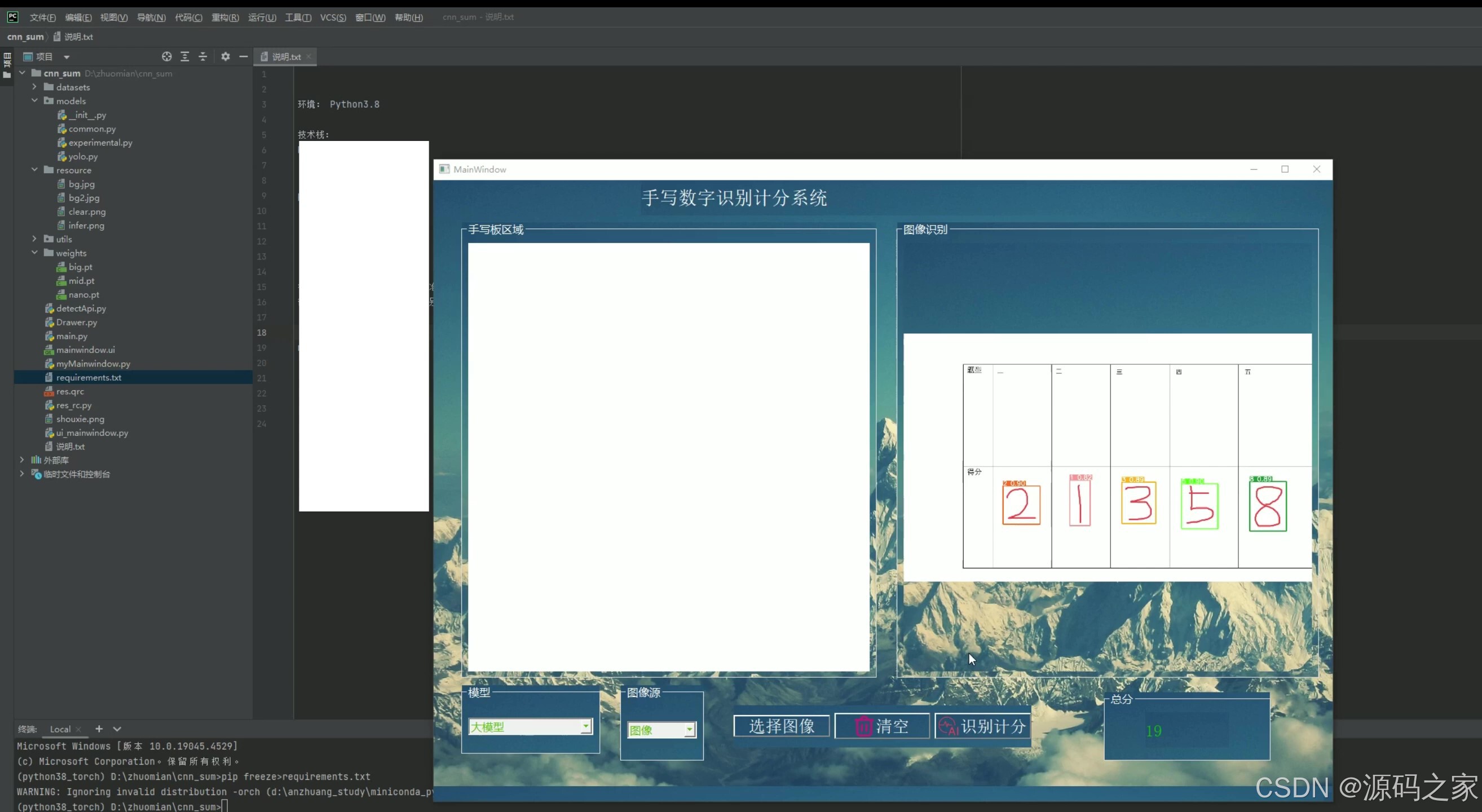
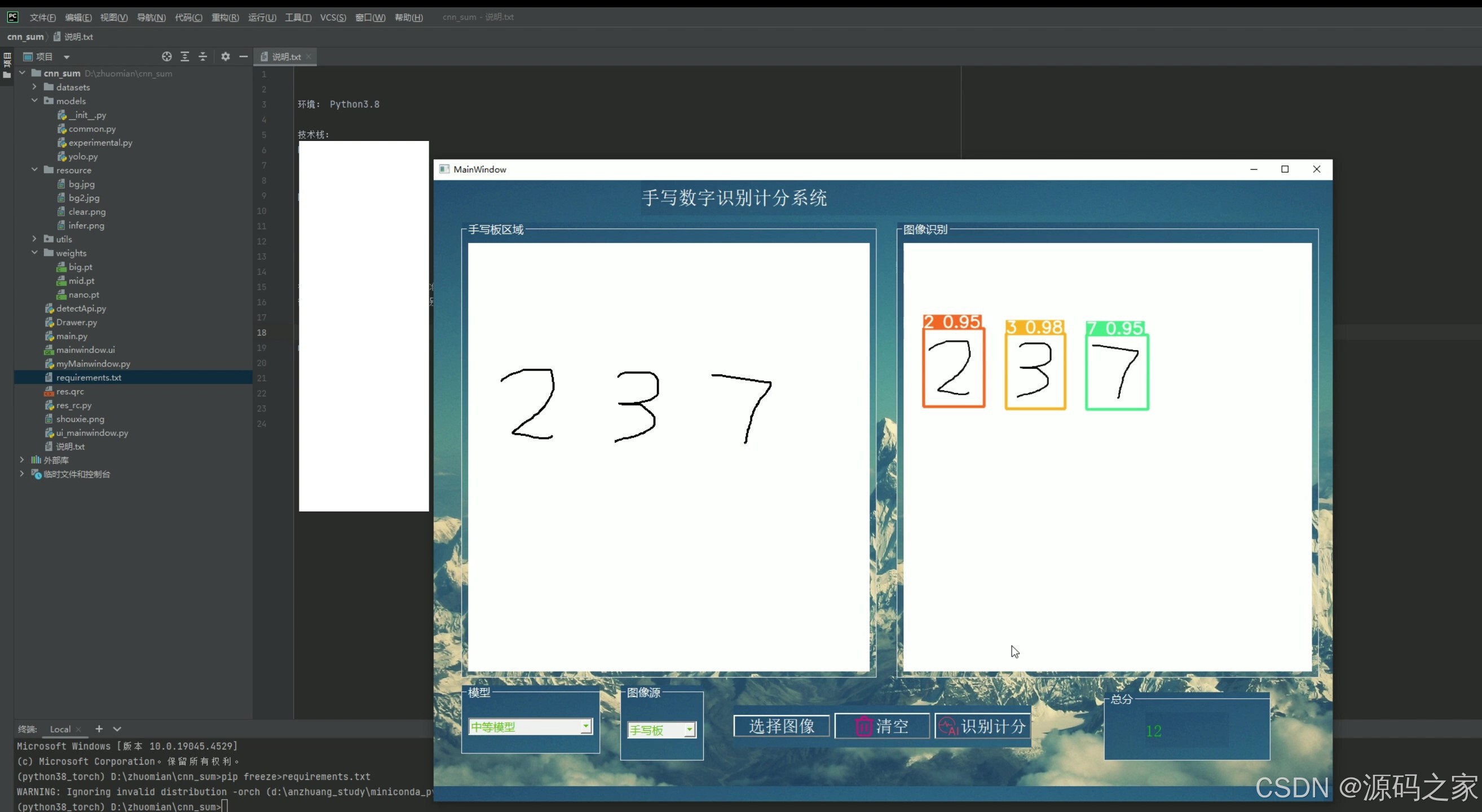
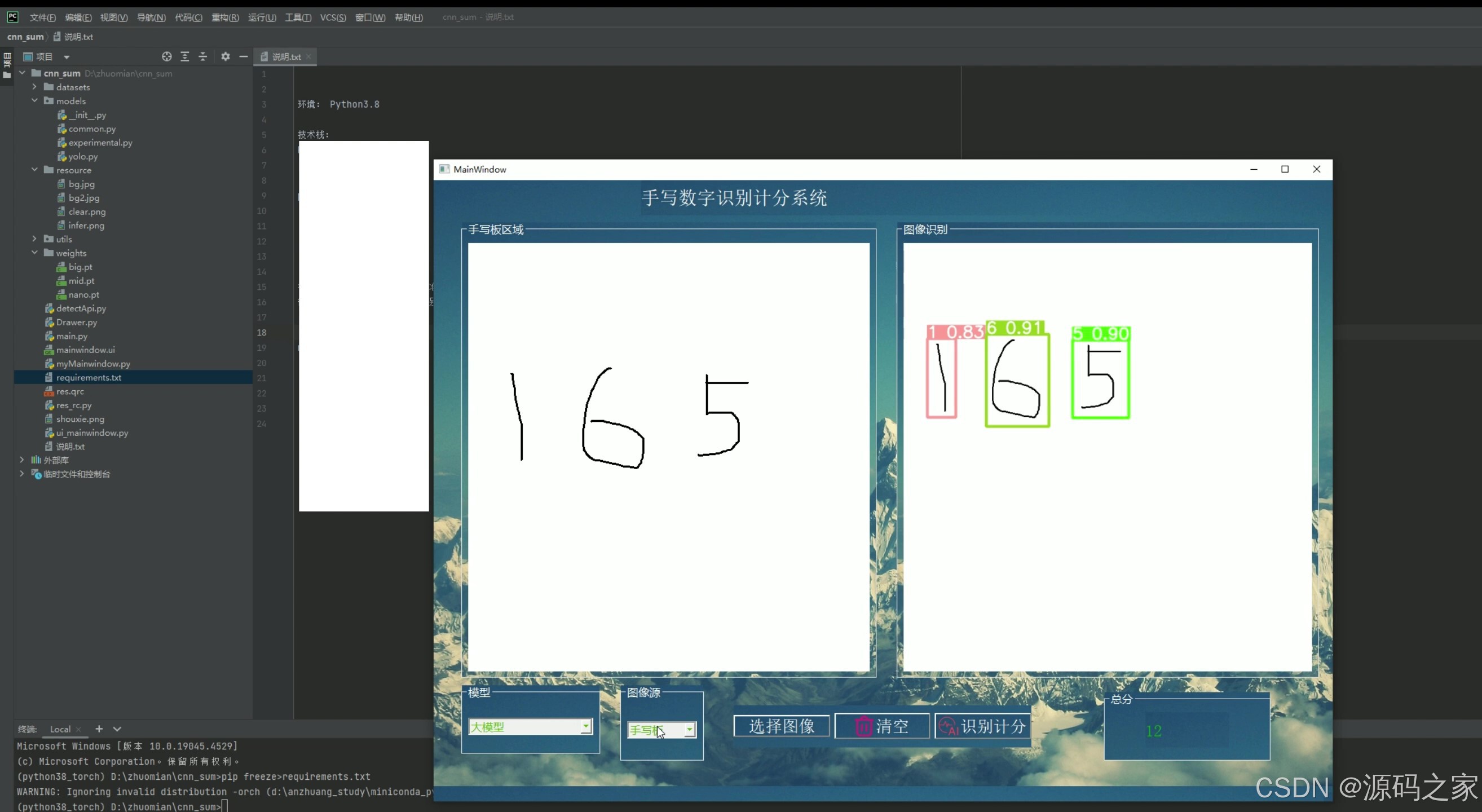
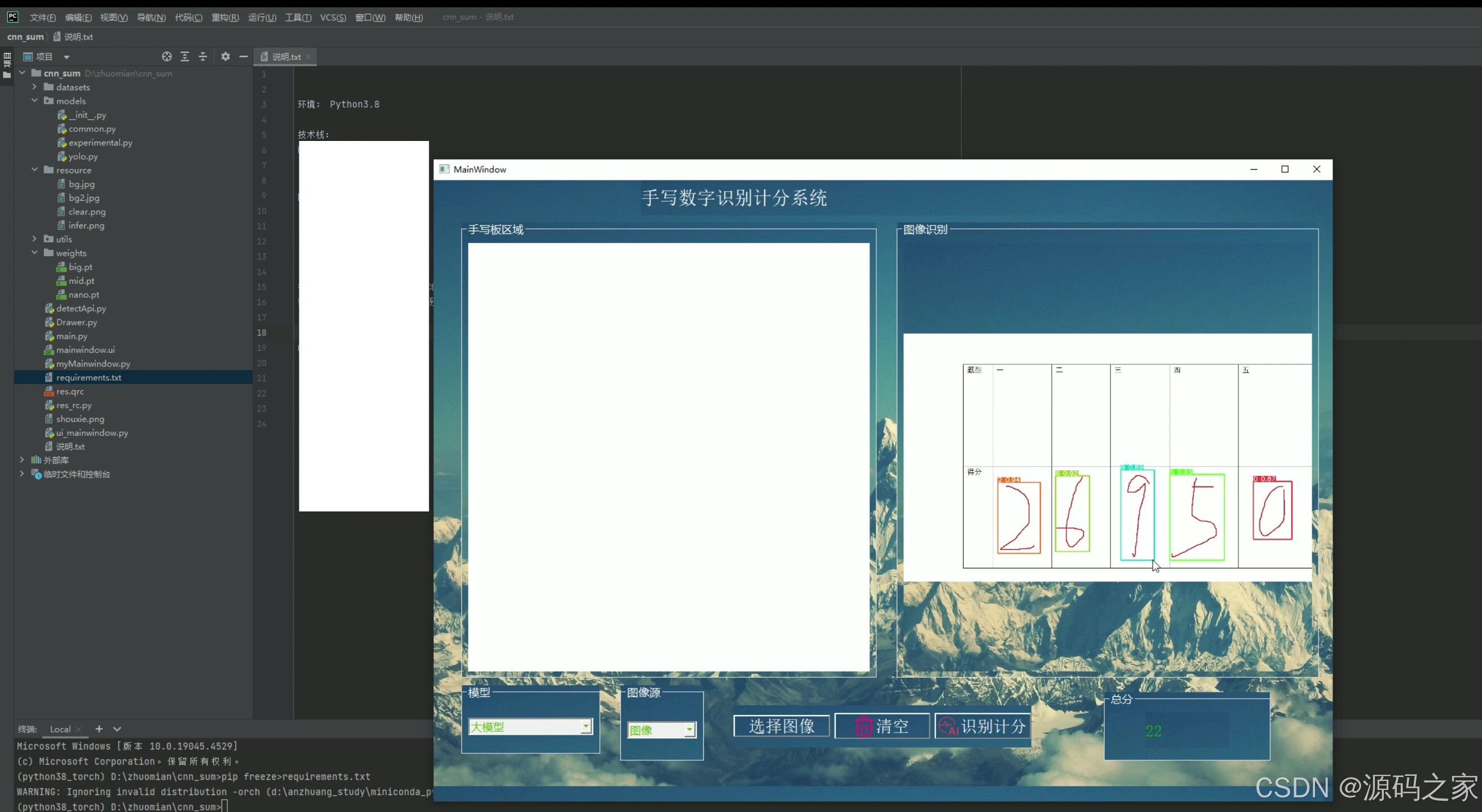
可以选择模型,图像来源,选择图像、检测识别并计分、显示总分
2、项目界面
(1)手写数字识别计分系统—界面展示
(2)手写数字识别计分系统—界面展示
(3)手写数字识别计分系统—界面展示
(4)手写数字识别计分系统—界面展示
3、项目说明
基于 Python 与深度学习的图像检测识别系统
本项目是一套集成多种深度学习模型与可视化交互界面的图像检测识别解决方案,以 Python 为开发语言,融合 PyTorch 深度学习框架、CNN 卷积神经网络、YOLOv5 目标检测模型及 PyQt 图形界面库,打造出功能完善、操作便捷的图像检测平台,可广泛应用于安防监控、工业质检、智能交通等场景的目标识别需求。
在技术架构层面,项目以 PyTorch 作为模型训练与推理的核心框架,充分发挥其灵活的张量计算能力与丰富的神经网络模块,为检测任务提供稳定的技术支撑。核心检测功能搭载两种主流模型:CNN 模型擅长对图像特征进行精细化提取,适用于纹理复杂、特征鲜明的目标识别场景;YOLOv5 模型则凭借其高效的实时检测性能,能快速定位图像中的多个目标,满足对检测速度要求较高的场景。用户可根据实际需求,在系统中自由切换两种模型,兼顾检测精度与效率。
在功能设计上,系统实现了 “图像来源选择 - 目标检测 - 自动计分 - 结果展示” 的全流程闭环。图像来源支持本地文件导入与摄像头实时采集两种模式,无论是预先存储的静态图像,还是动态捕捉的实时画面,均可无缝接入检测流程。用户选定图像后,点击检测按钮即可触发模型推理,系统会自动识别图像中的目标对象,标注目标位置并生成检测置信度,同时依据预设的计分规则(如目标识别准确率、检测速度等指标)自动计算单次检测得分。此外,系统还会记录历史检测数据,实时累加并显示总分,方便用户直观了解多轮检测的整体表现。
为提升用户体验,项目采用 PyQt 开发可视化交互界面,界面布局清晰明了,包含模型选择区、图像显示区、检测控制区与结果统计区四大模块。即使是非技术背景的用户,也能通过简单的鼠标点击完成模型切换、图像导入、检测启动等操作,极大降低了使用门槛。整体而言,该系统兼具技术先进性与实用便捷性,为图像检测识别任务提供了一体化的解决方案,有效提升了目标检测的效率与智能化水平。
4、核心代码
"""
YOLO-specific modulesUsage:$ python path/to/models/yolo.py --cfg yolov5s.yaml
"""import argparse
import contextlib
import os
import platform
import sys
from copy import deepcopy
from pathlib import PathFILE = Path(__file__).resolve()
ROOT = FILE.parents[1] # YOLOv5 root directory
if str(ROOT) not in sys.path:sys.path.append(str(ROOT)) # add ROOT to PATH
if platform.system() != 'Windows':ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relativefrom models.common import *
from models.experimental import *
from utils.autoanchor import check_anchor_order
from utils.general import LOGGER, check_version, check_yaml, make_divisible, print_args
from utils.plots import feature_visualization
from utils.torch_utils import (fuse_conv_and_bn, initialize_weights, model_info, profile, scale_img, select_device,time_sync)try:import thop # for FLOPs computation
except ImportError:thop = Noneclass Detect(nn.Module):stride = None # strides computed during buildonnx_dynamic = False # ONNX export parameterexport = False # export modedef __init__(self, nc=80, anchors=(), ch=(), inplace=True): # detection layersuper().__init__()self.nc = nc # number of classesself.no = nc + 5 # number of outputs per anchorself.nl = len(anchors) # number of detection layersself.na = len(anchors[0]) // 2 # number of anchorsself.grid = [torch.zeros(1)] * self.nl # init gridself.anchor_grid = [torch.zeros(1)] * self.nl # init anchor gridself.register_buffer('anchors', torch.tensor(anchors).float().view(self.nl, -1, 2)) # shape(nl,na,2)self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output convself.inplace = inplace # use inplace ops (e.g. slice assignment)def forward(self, x):z = [] # inference outputfor i in range(self.nl):x[i] = self.m[i](x[i]) # convbs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()if not self.training: # inferenceif self.onnx_dynamic or self.grid[i].shape[2:4] != x[i].shape[2:4]:self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)y = x[i].sigmoid()if self.inplace:y[..., 0:2] = (y[..., 0:2] * 2 + self.grid[i]) * self.stride[i] # xyy[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # whelse: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0xy = (xy * 2 + self.grid[i]) * self.stride[i] # xywh = (wh * 2) ** 2 * self.anchor_grid[i] # why = torch.cat((xy, wh, conf), 4)z.append(y.view(bs, -1, self.no))return x if self.training else (torch.cat(z, 1),) if self.export else (torch.cat(z, 1), x)def _make_grid(self, nx=20, ny=20, i=0, torch_1_10=check_version(torch.__version__, '1.10.0')):d = self.anchors[i].devicet = self.anchors[i].dtypeshape = 1, self.na, ny, nx, 2 # grid shapey, x = torch.arange(ny, device=d, dtype=t), torch.arange(nx, device=d, dtype=t)if torch_1_10: # torch>=1.10.0 meshgrid workaround for torch>=0.7 compatibilityyv, xv = torch.meshgrid(y, x, indexing='ij')else:yv, xv = torch.meshgrid(y, x)grid = torch.stack((xv, yv), 2).expand(shape) - 0.5 # add grid offset, i.e. y = 2.0 * x - 0.5anchor_grid = (self.anchors[i] * self.stride[i]).view((1, self.na, 1, 1, 2)).expand(shape)return grid, anchor_gridclass BaseModel(nn.Module):# YOLOv5 base modeldef forward(self, x, profile=False, visualize=False):return self._forward_once(x, profile, visualize) # single-scale inference, traindef _forward_once(self, x, profile=False, visualize=False):y, dt = [], [] # outputsfor m in self.model:if m.f != -1: # if not from previous layerx = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layersif profile:self._profile_one_layer(m, x, dt)x = m(x) # runy.append(x if m.i in self.save else None) # save outputif visualize:feature_visualization(x, m.type, m.i, save_dir=visualize)return xdef _profile_one_layer(self, m, x, dt):c = m == self.model[-1] # is final layer, copy input as inplace fixo = thop.profile(m, inputs=(x.copy() if c else x,), verbose=False)[0] / 1E9 * 2 if thop else 0 # FLOPst = time_sync()for _ in range(10):m(x.copy() if c else x)dt.append((time_sync() - t) * 100)if m == self.model[0]:LOGGER.info(f"{'time (ms)':>10s} {'GFLOPs':>10s} {'params':>10s} module")LOGGER.info(f'{dt[-1]:10.2f} {o:10.2f} {m.np:10.0f} {m.type}')if c:LOGGER.info(f"{sum(dt):10.2f} {'-':>10s} {'-':>10s} Total")def fuse(self): # fuse model Conv2d() + BatchNorm2d() layersLOGGER.info('Fusing layers... ')for m in self.model.modules():if isinstance(m, (Conv, DWConv)) and hasattr(m, 'bn'):m.conv = fuse_conv_and_bn(m.conv, m.bn) # update convdelattr(m, 'bn') # remove batchnormm.forward = m.forward_fuse # update forwardself.info()return selfdef info(self, verbose=False, img_size=640): # print model informationmodel_info(self, verbose, img_size)def _apply(self, fn):# Apply to(), cpu(), cuda(), half() to model tensors that are not parameters or registered buffersself = super()._apply(fn)m = self.model[-1] # Detect()if isinstance(m, Detect):m.stride = fn(m.stride)m.grid = list(map(fn, m.grid))if isinstance(m.anchor_grid, list):m.anchor_grid = list(map(fn, m.anchor_grid))return selfclass DetectionModel(BaseModel):# YOLOv5 detection modeldef __init__(self, cfg='yolov5s.yaml', ch=3, nc=None, anchors=None): # model, input channels, number of classessuper().__init__()if isinstance(cfg, dict):self.yaml = cfg # model dictelse: # is *.yamlimport yaml # for torch hubself.yaml_file = Path(cfg).namewith open(cfg, encoding='ascii', errors='ignore') as f:self.yaml = yaml.safe_load(f) # model dict# Define modelch = self.yaml['ch'] = self.yaml.get('ch', ch) # input channelsif nc and nc != self.yaml['nc']:LOGGER.info(f"Overriding model.yaml nc={self.yaml['nc']} with nc={nc}")self.yaml['nc'] = nc # override yaml valueif anchors:LOGGER.info(f'Overriding model.yaml anchors with anchors={anchors}')self.yaml['anchors'] = round(anchors) # override yaml valueself.model, self.save = parse_model(deepcopy(self.yaml), ch=[ch]) # model, savelistself.names = [str(i) for i in range(self.yaml['nc'])] # default namesself.inplace = self.yaml.get('inplace', True)# Build strides, anchorsm = self.model[-1] # Detect()if isinstance(m, Detect):s = 256 # 2x min stridem.inplace = self.inplacem.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forwardcheck_anchor_order(m) # must be in pixel-space (not grid-space)m.anchors /= m.stride.view(-1, 1, 1)self.stride = m.strideself._initialize_biases() # only run once# Init weights, biasesinitialize_weights(self)self.info()LOGGER.info('')def forward(self, x, augment=False, profile=False, visualize=False):if augment:return self._forward_augment(x) # augmented inference, Nonereturn self._forward_once(x, profile, visualize) # single-scale inference, traindef _forward_augment(self, x):img_size = x.shape[-2:] # height, widths = [1, 0.83, 0.67] # scalesf = [None, 3, None] # flips (2-ud, 3-lr)y = [] # outputsfor si, fi in zip(s, f):xi = scale_img(x.flip(fi) if fi else x, si, gs=int(self.stride.max()))yi = self._forward_once(xi)[0] # forward# cv2.imwrite(f'img_{si}.jpg', 255 * xi[0].cpu().numpy().transpose((1, 2, 0))[:, :, ::-1]) # saveyi = self._descale_pred(yi, fi, si, img_size)y.append(yi)y = self._clip_augmented(y) # clip augmented tailsreturn torch.cat(y, 1), None # augmented inference, traindef _descale_pred(self, p, flips, scale, img_size):# de-scale predictions following augmented inference (inverse operation)if self.inplace:p[..., :4] /= scale # de-scaleif flips == 2:p[..., 1] = img_size[0] - p[..., 1] # de-flip udelif flips == 3:p[..., 0] = img_size[1] - p[..., 0] # de-flip lrelse:x, y, wh = p[..., 0:1] / scale, p[..., 1:2] / scale, p[..., 2:4] / scale # de-scaleif flips == 2:y = img_size[0] - y # de-flip udelif flips == 3:x = img_size[1] - x # de-flip lrp = torch.cat((x, y, wh, p[..., 4:]), -1)return pdef _clip_augmented(self, y):# Clip YOLOv5 augmented inference tailsnl = self.model[-1].nl # number of detection layers (P3-P5)g = sum(4 ** x for x in range(nl)) # grid pointse = 1 # exclude layer counti = (y[0].shape[1] // g) * sum(4 ** x for x in range(e)) # indicesy[0] = y[0][:, :-i] # largei = (y[-1].shape[1] // g) * sum(4 ** (nl - 1 - x) for x in range(e)) # indicesy[-1] = y[-1][:, i:] # smallreturn ydef _initialize_biases(self, cf=None): # initialize biases into Detect(), cf is class frequency# https://arxiv.org/abs/1708.02002 section 3.3# cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.m = self.model[-1] # Detect() modulefor mi, s in zip(m.m, m.stride): # fromb = mi.bias.view(m.na, -1).detach() # conv.bias(255) to (3,85)b[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)b[:, 5:] += math.log(0.6 / (m.nc - 0.999999)) if cf is None else torch.log(cf / cf.sum()) # clsmi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)Model = DetectionModel # retain YOLOv5 'Model' class for backwards compatibilityclass ClassificationModel(BaseModel):# YOLOv5 classification modeldef __init__(self, cfg=None, model=None, nc=1000, cutoff=10): # yaml, model, number of classes, cutoff indexsuper().__init__()self._from_detection_model(model, nc, cutoff) if model is not None else self._from_yaml(cfg)def _from_detection_model(self, model, nc=1000, cutoff=10):# Create a YOLOv5 classification model from a YOLOv5 detection modelif isinstance(model, DetectMultiBackend):model = model.model # unwrap DetectMultiBackendmodel.model = model.model[:cutoff] # backbonem = model.model[-1] # last layerch = m.conv.in_channels if hasattr(m, 'conv') else m.cv1.conv.in_channels # ch into modulec = Classify(ch, nc) # Classify()c.i, c.f, c.type = m.i, m.f, 'models.common.Classify' # index, from, typemodel.model[-1] = c # replaceself.model = model.modelself.stride = model.strideself.save = []self.nc = ncdef _from_yaml(self, cfg):# Create a YOLOv5 classification model from a *.yaml fileself.model = Nonedef parse_model(d, ch): # model_dict, input_channels(3)LOGGER.info(f"\n{'':>3}{'from':>18}{'n':>3}{'params':>10} {'module':<40}{'arguments':<30}")anchors, nc, gd, gw = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple']na = (len(anchors[0]) // 2) if isinstance(anchors, list) else anchors # number of anchorsno = na * (nc + 5) # number of outputs = anchors * (classes + 5)layers, save, c2 = [], [], ch[-1] # layers, savelist, ch outfor i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, argsm = eval(m) if isinstance(m, str) else m # eval stringsfor j, a in enumerate(args):with contextlib.suppress(NameError):args[j] = eval(a) if isinstance(a, str) else a # eval stringsn = n_ = max(round(n * gd), 1) if n > 1 else n # depth gainif m in (Conv, GhostConv, Bottleneck, GhostBottleneck, SPP, SPPF, DWConv, MixConv2d, Focus, CrossConv,BottleneckCSP, C3, C3TR, C3SPP, C3Ghost, nn.ConvTranspose2d, DWConvTranspose2d, C3x):c1, c2 = ch[f], args[0]if c2 != no: # if not outputc2 = make_divisible(c2 * gw, 8)args = [c1, c2, *args[1:]]if m in [BottleneckCSP, C3, C3TR, C3Ghost, C3x]:args.insert(2, n) # number of repeatsn = 1elif m is nn.BatchNorm2d:args = [ch[f]]elif m is Concat:c2 = sum(ch[x] for x in f)elif m is Detect:args.append([ch[x] for x in f])if isinstance(args[1], int): # number of anchorsargs[1] = [list(range(args[1] * 2))] * len(f)elif m is Contract:c2 = ch[f] * args[0] ** 2elif m is Expand:c2 = ch[f] // args[0] ** 2else:c2 = ch[f]m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # modulet = str(m)[8:-2].replace('__main__.', '') # module typenp = sum(x.numel() for x in m_.parameters()) # number paramsm_.i, m_.f, m_.type, m_.np = i, f, t, np # attach index, 'from' index, type, number paramsLOGGER.info(f'{i:>3}{str(f):>18}{n_:>3}{np:10.0f} {t:<40}{str(args):<30}') # printsave.extend(x % i for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelistlayers.append(m_)if i == 0:ch = []ch.append(c2)return nn.Sequential(*layers), sorted(save)if __name__ == '__main__':parser = argparse.ArgumentParser()parser.add_argument('--cfg', type=str, default='yolov5s.yaml', help='model.yaml')parser.add_argument('--batch-size', type=int, default=1, help='total batch size for all GPUs')parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')parser.add_argument('--profile', action='store_true', help='profile model speed')parser.add_argument('--line-profile', action='store_true', help='profile model speed layer by layer')parser.add_argument('--test', action='store_true', help='test all yolo*.yaml')opt = parser.parse_args()opt.cfg = check_yaml(opt.cfg) # check YAMLprint_args(vars(opt))device = select_device(opt.device)# Create modelim = torch.rand(opt.batch_size, 3, 640, 640).to(device)model = Model(opt.cfg).to(device)# Optionsif opt.line_profile: # profile layer by layermodel(im, profile=True)elif opt.profile: # profile forward-backwardresults = profile(input=im, ops=[model], n=3)elif opt.test: # test all modelsfor cfg in Path(ROOT / 'models').rglob('yolo*.yaml'):try:_ = Model(cfg)except Exception as e:print(f'Error in {cfg}: {e}')else: # report fused model summarymodel.fuse()🍅✌感兴趣的可以先收藏起来,点赞关注不迷路,想学习更多项目可以查看主页,大家在毕设选题,项目编程以及论文编写等相关问题都可以给我留言咨询,希望可以帮助同学们顺利毕业!🍅✌
5、源码获取方式
🍅由于篇幅限制,获取完整文章或源码、代做项目的,拉到文章底部即可看到个人联系方式。🍅
点赞、收藏、关注,不迷路,下方查看👇🏻获取联系方式👇🏻