磁共振成像原理(理论)36:回波平面成像 (Echo-Planar Imaging)
本专题主要参考《Principles of Magnetic Resonance Imaging A Signal Processing Perspective 》-Sec 9.3
回波平面成像
回波平面成像(Echo-Planar Imaging, EPI)是曼斯菲尔德于1977年提出的首种超高速成像技术。此后发展出多种变体。如今该术语广泛指代在单次激发脉冲后的自由感应衰减期内采集"完整"二维编码集的高速成像方法类别。因此,EPI已成为单次激造成像的同义词,尽管具有交错k空间覆盖的多激发EPI方法也常用。
EPI的关键概念是利用时变梯度遍历k空间。接下来讨论三种流行的k空间轨迹:Z字形轨迹、直线轨迹和螺旋轨迹。
Z字形轨迹
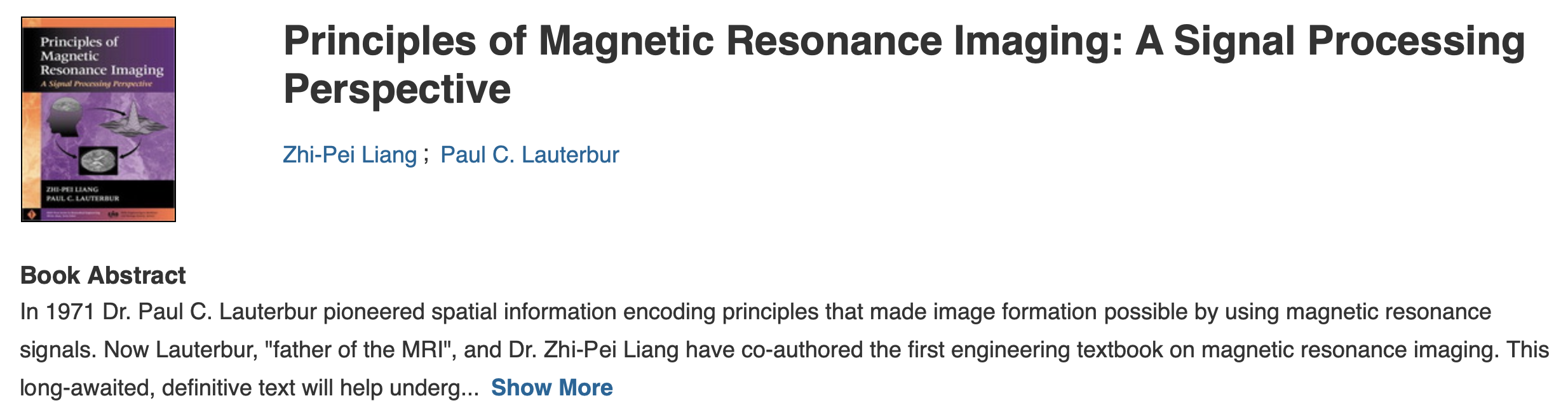
为理解单次激发下的k空间覆盖,首先考虑曼斯菲尔德提出的原始EPI方法(图9.8)。该成像方案在读出期间使用一对频率编码梯度:小型恒定梯度和快速交变梯度。交变梯度在自由进动期间产生一系列梯度回波,从而实现快速成像。
根据k空间定义:
k(t)=γ∫0tG(τ)dτ(9.43)
k(t) = \gamma \int_{0}^{t} G(\tau) d\tau \tag{9.43}
k(t)=γ∫0tG(τ)dτ(9.43)
上图9.8所展示的序列对应的k空间编码为:
ky(t)=γGyt(9.44a)
k_y(t) = \gamma G_y t \tag{9.44a}
ky(t)=γGyt(9.44a)
kx(t)={γGxt,0<t<τγGx(2τ−t),τ<t<3τγGx(t−4τ),3τ<t<5τ(9.44b)
k_x(t) =
\begin{cases}
\gamma G_x t, & 0 < t < \tau \\
\gamma G_x (2\tau - t), & \tau < t < 3\tau \\
\gamma G_x (t - 4\tau), & 3\tau < t < 5\tau
\end{cases} \tag{9.44b}
kx(t)=⎩⎨⎧γGxt,γGx(2τ−t),γGx(t−4τ),0<t<ττ<t<3τ3τ<t<5τ(9.44b)
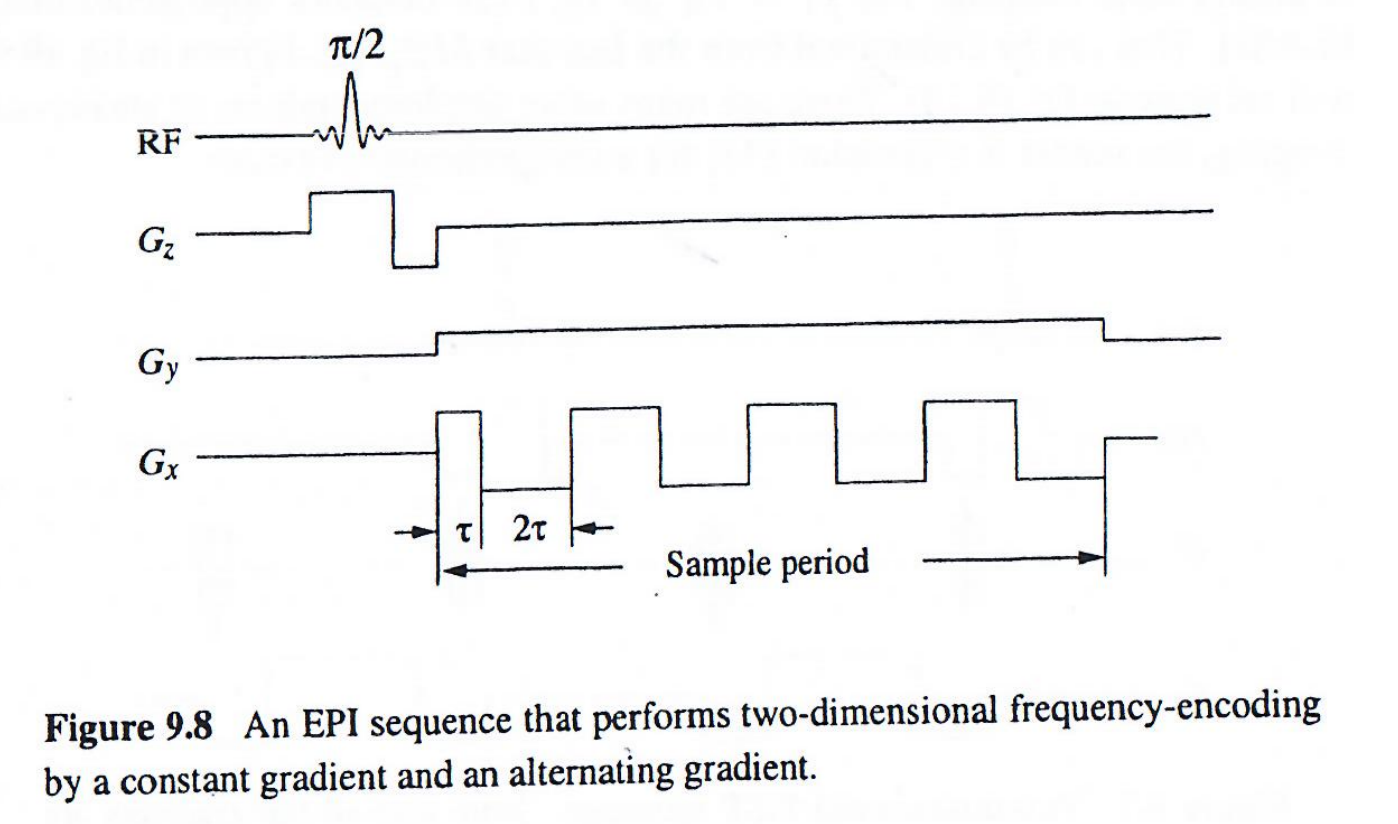
因此,该序列产生的每个梯度回波被映射到倾斜的k空间线,形成下图9.9所示的Z字形轨迹。注意该轨迹仅覆盖k空间上半部分。为获得全k空间覆盖,需形成自旋回波或梯度回波。
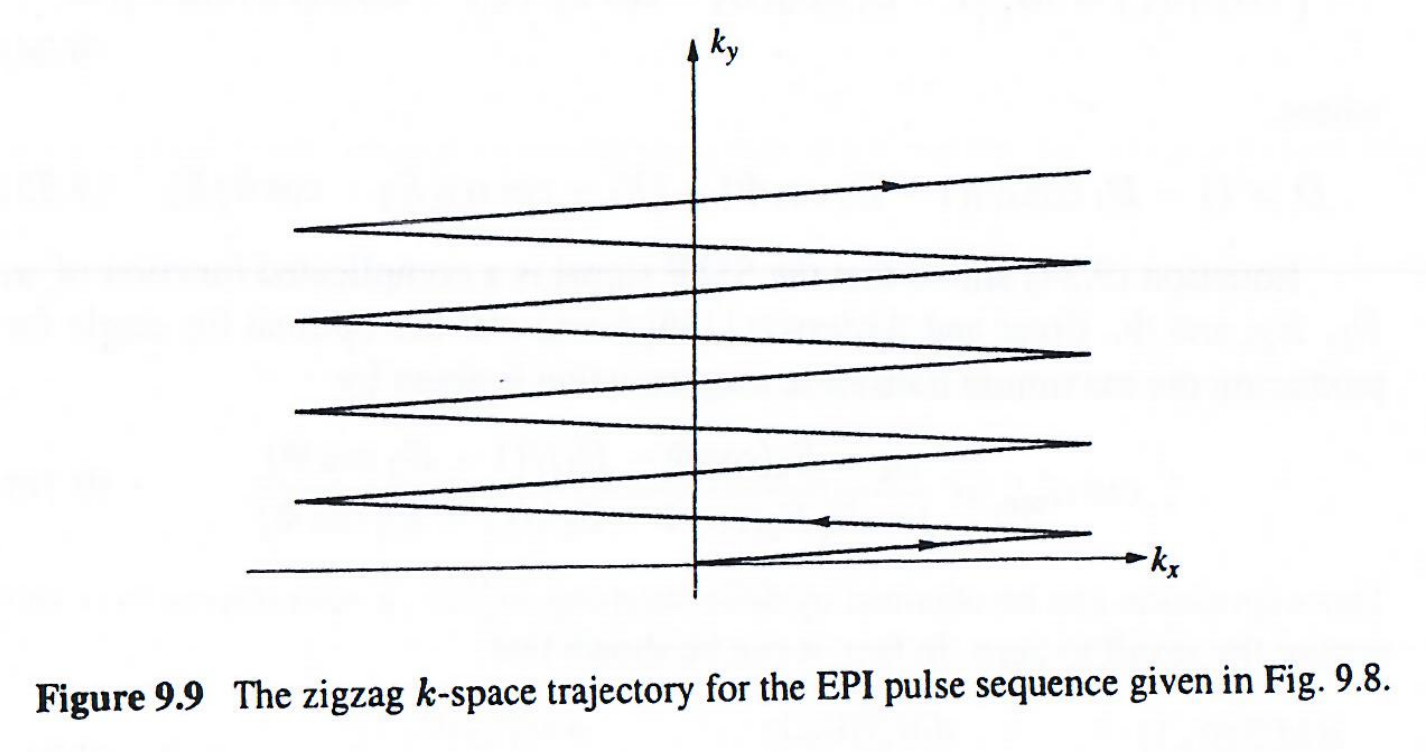
Z字形轨迹的实际问题是需要特殊图像重建算法,因为沿kyk_yky方向的采样是非均匀的。解决方法之一是使用交错采样理论。具体而言,固定kxk_xkx值时,沿kyk_yky轴的信号变化可表示为S(ky)S(k_y)S(ky),其采样如图9.10所示。
将采样点分为奇偶索引序列:
So[n]=S(2nΔky)(9.45)
S_o[n] = S(2n\Delta k_y) \tag{9.45}
So[n]=S(2nΔky)(9.45)
Se[n]=S(2nΔky+δ)(9.46)
S_e[n] = S(2n\Delta k_y + \delta) \tag{9.46}
Se[n]=S(2nΔky+δ)(9.46)
在理想无限采样下,回忆式子(6.10)如下
∑n=−∞∞S[n]ei2πnΔkx=1Δk∑n=−∞∞I(x−nΔk)(6.10)
\sum_{n=-\infty}^{\infty} S[n]e^{i2\pi n\Delta k x} = \frac{1}{\Delta k}\sum_{n=-\infty}^{\infty} I\left(x - \frac{n}{\Delta k}\right) \tag{6.10}
n=−∞∑∞S[n]ei2πnΔkx=Δk1n=−∞∑∞I(x−Δkn)(6.10)
I^(x)=∑n=−∞∞I(x−nΔk)=Δk⋅∑n=−∞∞S[n]ei2πnΔkx(6.10-new)
\hat I(x)=\sum_{n=-\infty}^{\infty} I\left(x - \frac{n}{\Delta k}\right)={\Delta k} \cdot \sum_{n=-\infty}^{\infty} S[n]e^{i2\pi n\Delta k x}\tag{6.10-new}
I^(x)=n=−∞∑∞I(x−Δkn)=Δk⋅n=−∞∑∞S[n]ei2πnΔkx(6.10-new)
根据式子(6.10),将x→yx \to yx→y,奇索引的傅里叶重建结果为:
Io(y)=∑nI(y−n2Δky)(9.47)
I_o(y) = \sum_n I\left(y - \frac{n}{2\Delta k_y}\right) \tag{9.47}
Io(y)=n∑I(y−2Δkyn)(9.47)
偶索引的傅里叶重建结果为:
Ie(y)=∑neinπδI(y−n2Δky)(9.48)
I_e(y) = \sum_n e^{in\pi\delta} I\left(y - \frac{n}{2\Delta k_y}\right) \tag{9.48}
Ie(y)=n∑einπδI(y−2Δkyn)(9.48)
当ΔkyΔk_yΔky取奈奎斯特采样间隔时,Io(y)I_o(y)Io(y)和Ie(y)I_e(y)Ie(y)会产生混叠伪影(图9.11)。但在特定区间内可通过代数运算消除:
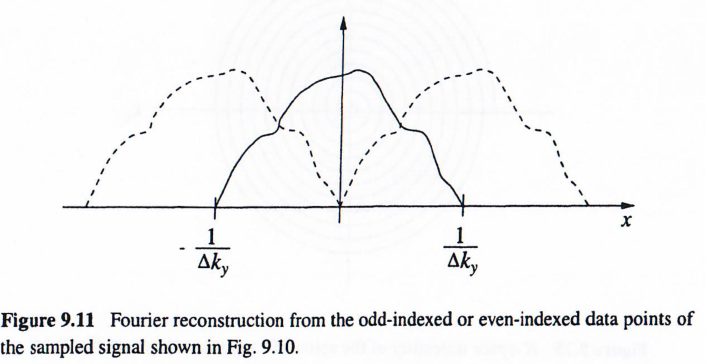
对于0≤y≤1/(2Δky)0 \leq y \leq 1/(2\Delta k_y)0≤y≤1/(2Δky)区间:
Io(y)=I(y)+I(y−12Δky)(9.49a)
I_o(y) = I(y) + I\left(y - \frac{1}{2\Delta k_y}\right) \tag{9.49a}
Io(y)=I(y)+I(y−2Δky1)(9.49a)
Ie(y)=I(y)+eiπδI(y−12Δky)(9.49b)
I_e(y) = I(y) + e^{i\pi\delta} I\left(y - \frac{1}{2\Delta k_y}\right) \tag{9.49b}
Ie(y)=I(y)+eiπδI(y−2Δky1)(9.49b)
对于−1/(2Δky)≤y≤0-1/(2\Delta k_y) \leq y \leq 0−1/(2Δky)≤y≤0区间:
Io(y)=I(y)+I(y+12Δky)(9.50a)
I_o(y) = I(y) + I\left(y + \frac{1}{2\Delta k_y}\right) \tag{9.50a}
Io(y)=I(y)+I(y+2Δky1)(9.50a)
Ie(y)=I(y)+e−iπδI(y+12Δky)(9.50b)
I_e(y) = I(y) + e^{-i\pi\delta} I\left(y + \frac{1}{2\Delta k_y}\right) \tag{9.50b}
Ie(y)=I(y)+e−iπδI(y+2Δky1)(9.50b)
通过简单代数运算可得解混叠公式:
I(y)={eiπδeiπδ−1Io(y)+1eiπδ−1Ie(y),0≤y≤1/(2Δky)e−iπδe−iπδ−1Io(y)+1e−iπδ−1Ie(y),−1/(2Δky)≤y≤0(9.51)
I(y) =
\begin{cases}
\frac{e^{i\pi\delta}}{e^{i\pi\delta} - 1} I_o(y) + \frac{1}{e^{i\pi\delta} - 1} I_e(y), & 0 \leq y \leq 1/(2\Delta k_y) \\
\frac{e^{-i\pi\delta}}{e^{-i\pi\delta} - 1} I_o(y) + \frac{1}{e^{-i\pi\delta} - 1} I_e(y), & -1/(2\Delta k_y) \leq y \leq 0
\end{cases} \tag{9.51}
I(y)={eiπδ−1eiπδIo(y)+eiπδ−11Ie(y),e−iπδ−1e−iπδIo(y)+e−iπδ−11Ie(y),0≤y≤1/(2Δky)−1/(2Δky)≤y≤0(9.51)
实际有限采样时,Io(y)I_o(y)Io(y)和Ie(y)I_e(y)Ie(y)可用常规FFT算法重建,再按式子(9.51)重组得到I(y)I(y)I(y)。
直线轨迹
Pykett和Rzedzian(1987)提出的EPI序列可实现k空间正交采样(图9.12)。该序列使用系列blipped GyG_yGy脉冲对单个梯度回波进行相位编码。与传统成像不同,此处相位编码梯度幅度恒定,无需递增步进,因为横向磁化会累积每个相位编码blip引入的相位分散。这种相位累积效应在传统成像中不会发生,因为每个相位编码步会生成新的横向磁化。
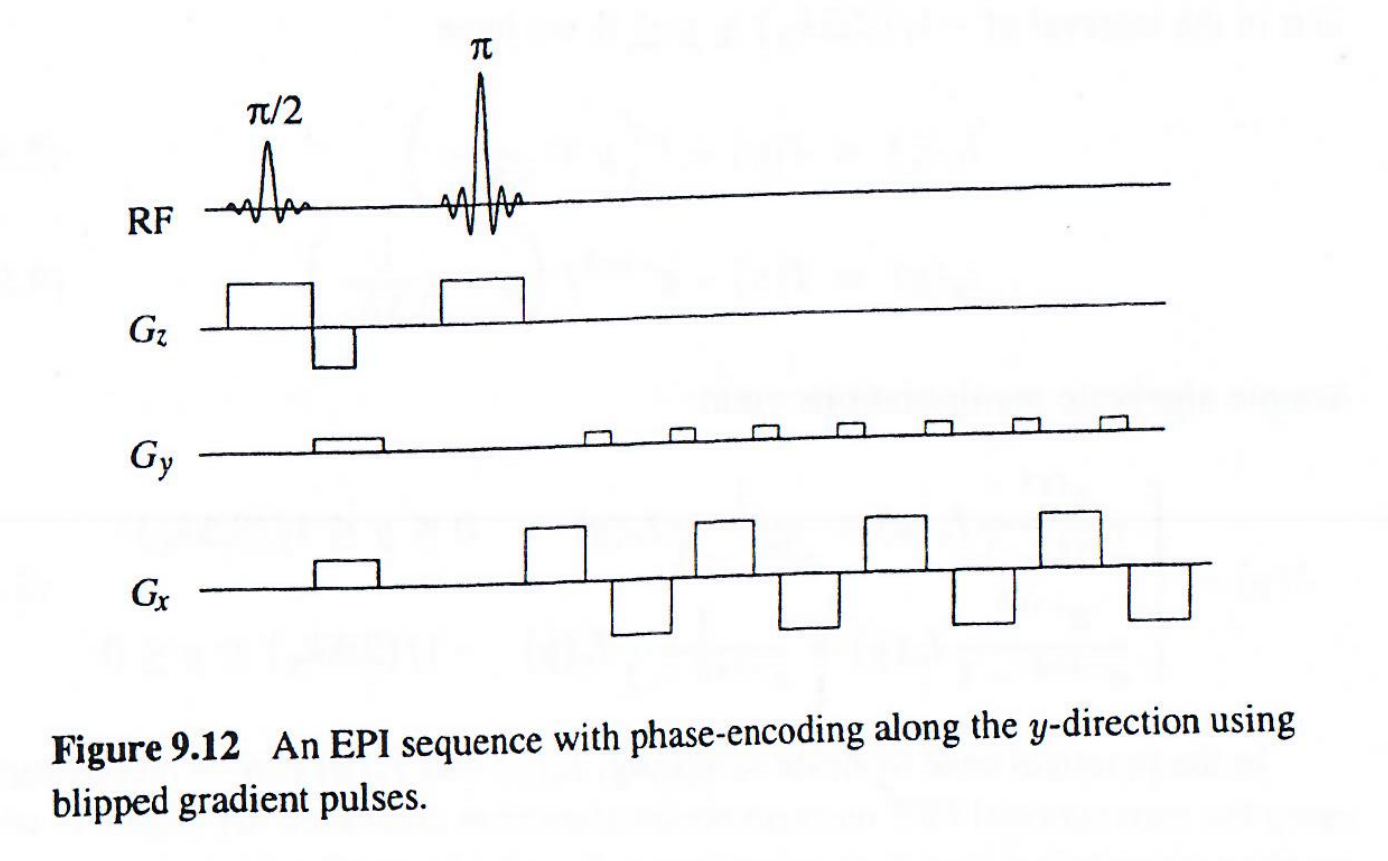
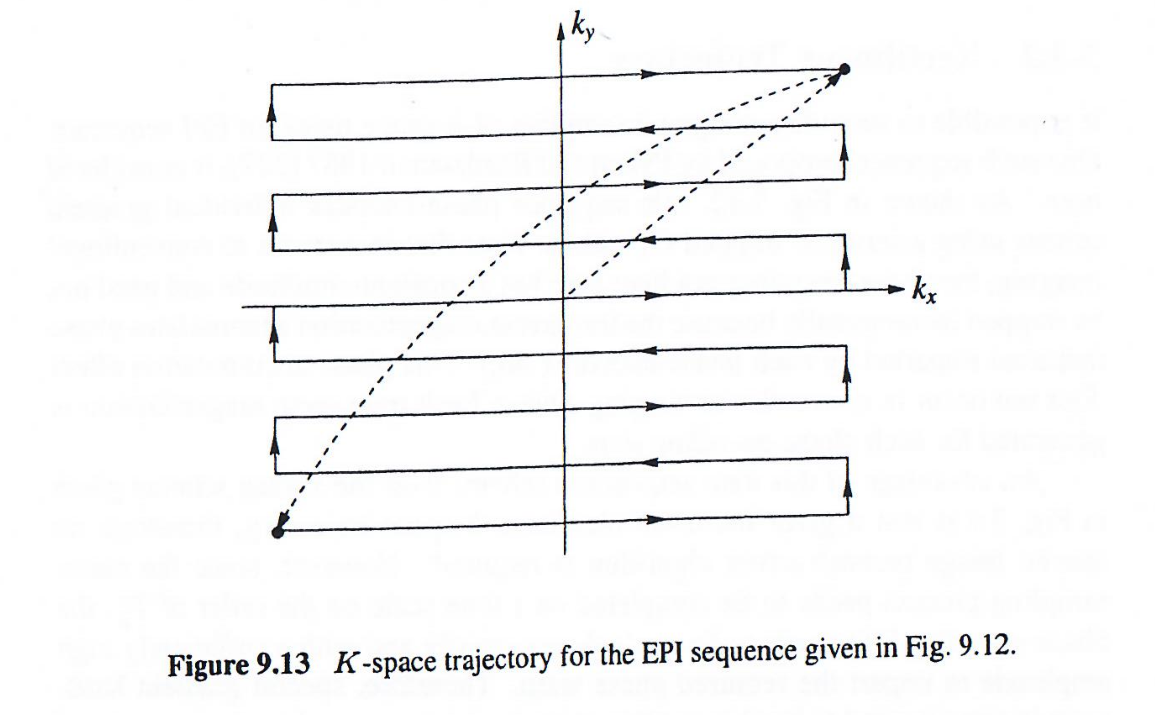
该方案相比Z字形轨迹的优势是产生常规直线k空间轨迹(图9.13),无需特殊重建算法。但由于整个采样过程需在T2时间尺度内完成,相位编码blip需快速施加且幅度足够高,因此常需特殊梯度硬件(要求快速切换,需要梯度电流带宽要求较高)实现。
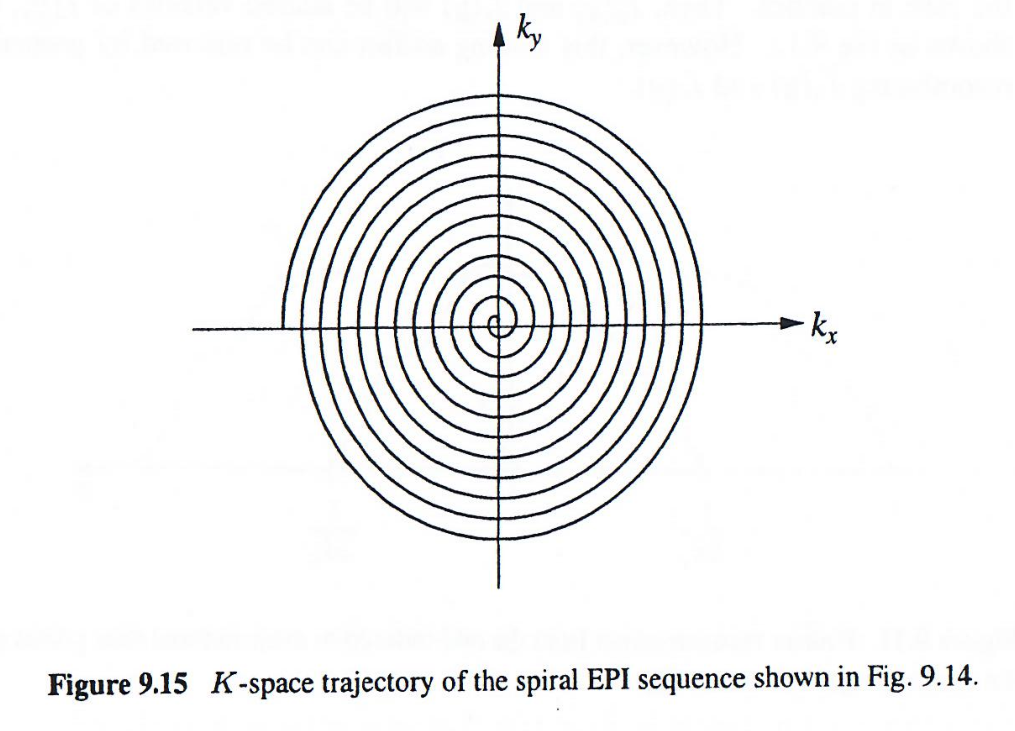
螺旋轨迹
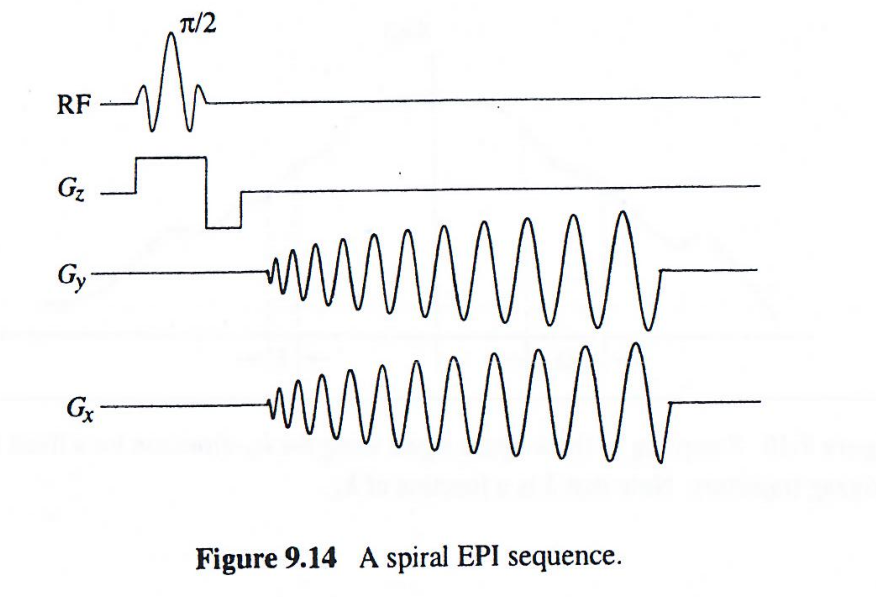
图9.14所示的单次成像方法对梯度硬件要求较低。该方法使用一对递增正弦梯度以螺旋方式遍历k空间(图9.15),称为螺旋成像。该方法完全消除了先前序列所需的快速梯度切换。
螺旋轨迹的数学表达式为:
k(t)=Aω(t)eiω(t)(9.52) \mathbf{k}(t) = A \omega(t) e^{i\omega(t)} \tag{9.52} k(t)=Aω(t)eiω(t)(9.52)
其中k=kx+ikyk = k_x + ik_yk=kx+iky,ω(t)ω(t)ω(t)和φ(t)φ(t)φ(t)是时间函数。螺旋序列设计的关键步骤是角速度函数选择。例如:
ω(t)=ω0t(9.53)
\omega(t) = \omega_0 t \tag{9.53}
ω(t)=ω0t(9.53)
对应k空间轨迹为:
k(t)=Aω0teiω0t(9.54)
\mathbf{k}(t) = A \omega_0 t e^{i\omega_0 t} \tag{9.54}
k(t)=Aω0teiω0t(9.54)
或简化为:
k(t)=Ateiω0t(9.55)
\mathbf{k}(t) = A t e^{i\omega_0 t} \tag{9.55}
k(t)=Ateiω0t(9.55)
根据k空间定义:
k(t)=γ∫0tG(τ)dτ(9.43)
k(t) = \gamma \int_{0}^{t} G(\tau) d\tau \tag{9.43}
k(t)=γ∫0tG(τ)dτ(9.43)
所需梯度函数为:
G(t)=1γddtk(t)=Aeiω0t+iAtω0eiω0t(9.56)
\begin{aligned}
\mathbf{G}(t) &= \frac{1}{\gamma} \frac{d}{dt} \mathbf{k}(t) \\
&= A e^{i\omega_0 t} + i A t \omega_0 e^{i\omega_0 t}
\end{aligned} \tag{9.56}
G(t)=γ1dtdk(t)=Aeiω0t+iAtω0eiω0t(9.56)
其中G(t)≡Gx+iGyG(t) ≡ G_x + iG_yG(t)≡Gx+iGy。对应梯度通道为:
Gx(t)=Acosω0t−Atω0sinω0t(9.57a)
G_x(t) = A \cos \omega_0 t - A t \omega_0 \sin \omega_0 t \tag{9.57a}
Gx(t)=Acosω0t−Atω0sinω0t(9.57a)
Gy(t)=Asinω0t+Atω0cosω0t(9.57b)
G_y(t) = A \sin \omega_0 t + A t \omega_0 \cos \omega_0 t \tag{9.57b}
Gy(t)=Asinω0t+Atω0cosω0t(9.57b)
该梯度对定义的螺旋路径具有恒定角速度(公式9.55所示),意味着k空间中心区域耗时比外围多。实际上,由于梯度强度限制,外围区域的扫描速度可能过大。该问题可通过恒定线速度螺旋轨迹克服,例如设:
ω(t)=ω0t(9.58)
\omega(t) = \omega_0 \sqrt{t} \tag{9.58}
ω(t)=ω0t(9.58)
对应地:
k(t)=Ateiω0t(9.59)
\mathbf{k}(t) = A \sqrt{t} e^{i\omega_0 \sqrt{t}} \tag{9.59}
k(t)=Ateiω0t(9.59)
且:
G(t)=A2teiω0t+A2ω0eiω0t(9.60)
G(t) = \frac{A}{2t} e^{i\omega_0 \sqrt{t}} + \frac{A}{2} \omega_0 e^{i\omega_0 \sqrt{t}} \tag{9.60}
G(t)=2tAeiω0t+2Aω0eiω0t(9.60)
在k空间外围区域(t较大时):
G(t)≈A2ω0eiω0t(9.61)
\mathbf{G}(t) \approx \frac{A}{2} \omega_0 e^{i\omega_0 \sqrt{t}} \tag{9.61}
G(t)≈2Aω0eiω0t(9.61)
意味着G(t)幅度变为常数。
该梯度函数的问题是在t=0处有极点,实际中因梯度强度和上升时间限制难以实现。更实用的螺旋轨迹定义为:
k(t)=At1+t/Teiω0t1+t/T(9.62)
\mathbf{k}(t) = A t \sqrt{1 + t/T} e^{i\omega_0 t \sqrt{1 + t/T}} \tag{9.62}
k(t)=At1+t/Teiω0t1+t/T(9.62)
其中TTT为时间参数,使k(t)k(t)k(t)在t≪T时具恒定角速度,t≫T时具恒定线速度。
螺旋轨迹数据需要特殊图像重建算法。实践中常用数据插值方案将螺旋数据映射到矩形网格,再用常规傅里叶重建算法处理。使用方形螺旋轨迹可减轻插值问题,仅需一维插值。
讨论
当前梯度技术下,EPI方法可在约50ms内采集二维图像,克服了生理运动引起的图像退化问题。此外,单次EPI的有效TRT_RTR无限长,产生具真实T2T_2T2或T2∗T_2^*T2∗对比度的图像。
尽管有这些优势,EPI方法仍有若干固有局限。首先,最大可达分辨率受T2∗T_2*T2∗值限制。具体地,T2∗T_2*T2∗点扩散函数(PSF)可写为:
h(x)=γGxT2∗−1+iγGxT2∗x(9.63)
h(x) = \frac{\gamma G_x T_2^*}{-1 + i \gamma G_x T_2^* x} \tag{9.63}
h(x)=−1+iγGxT2∗xγGxT2∗(9.63)
虽然该PSF沿读出方向可忽略,但在其他方向可能导致显著模糊,因为数据采集时间远大于T2∗T_2*T2∗。此外,EPI图像可能因偏共振效应和梯度误差产生明显伪影。