天津高端网站定制jsp 做网站需要什么软件
一、PID校正概述
PID校正是比例(Proportional)积分(Integral)微分(Derivative)校正的简称,是历史最悠久,生命力最强的控制方式。
其主要优点有:
①原理简单、使用方便
②适应性强,可广泛应用于各种工业过程控制领域
③鲁棒性强,控制品质对被控对象特性的变化不敏感。
PID校正的传递函数:

Kp是比例系数,能迅速的反应误差,从而减小误差,但不能消除稳态误差;
Ki是积分增益系数,用于消除稳态误差;
Kd是积分增益系数,用于增强系统的稳定性,减少调节时间。
PID控制是应用最广泛的控制器方案,常用的形式有P、PI、PID。
二、控制对象及需求
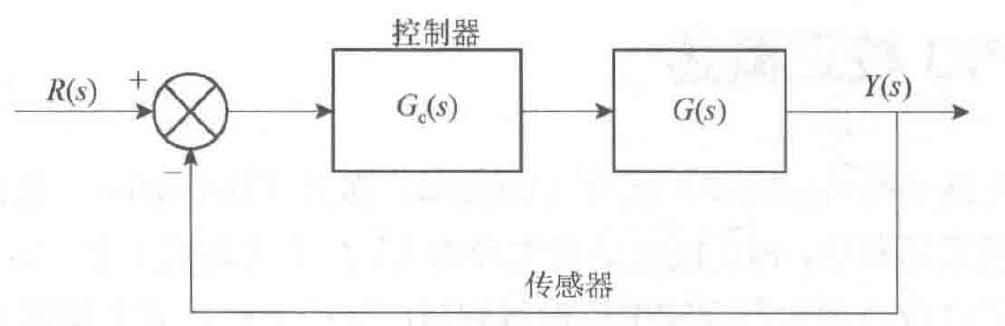
摩托车距离控制系统
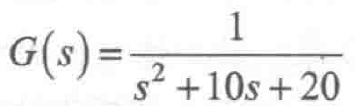
其中,R(s)为需求距离,Y(s)为实际距离,通过传感器反馈距离信息,摩托车内部发动机等的固有传递函数为
控制目标:
- 较快的上升时间和调节时间;
- 较小的调节两;
- 稳态误差为零。
三、利用Matlab Simulink对固有开环系统进行单位阶跃仿真
1、启动Simulink
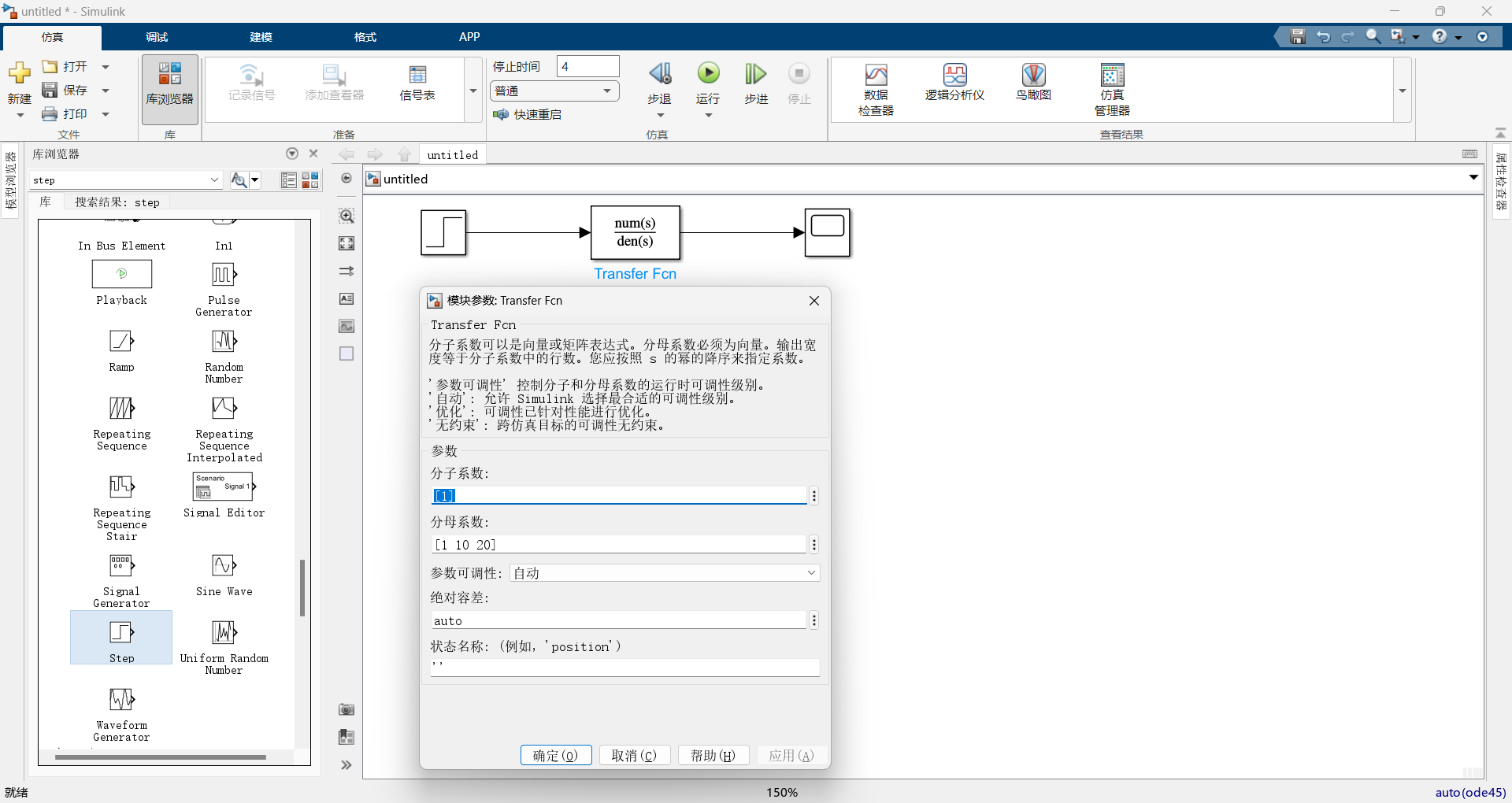
2、搭建模型
进入库浏览器,找到相应的模块并拖进去,输入采用单位阶跃,输出采用示波器,修改传递函数如下。
3、查看结果
点击运行,然后点击SCOPE,可以查看系统的输出响应。
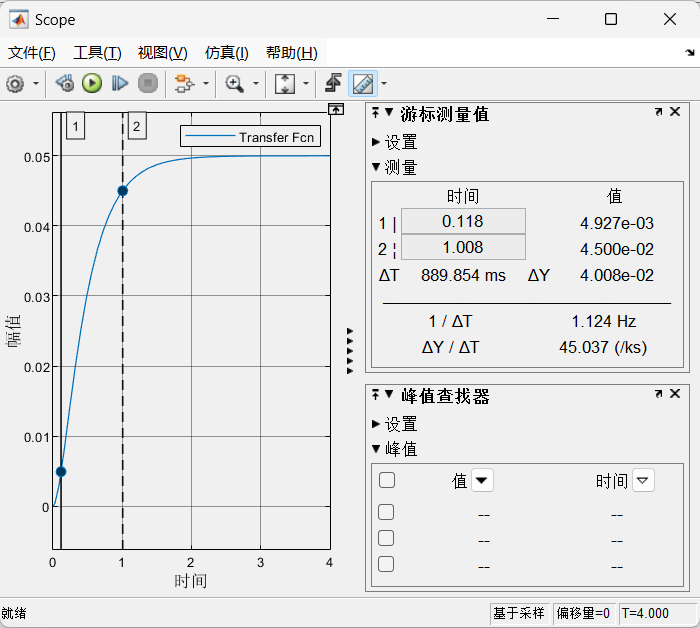
通过曲线可得系统的上升时间(10%-90%)为0.884s,调节时间1.5s。系统在幅值为1的阶跃响应输入下,稳态误差值为0.05,为系统传递函数分母常数项20的倒数。为大幅降低系统的稳态误差,首先考虑采用P校正。