[科普] GNSS授时原理
GNSS授时原理:从太空到地面的高精度时间传递
摘要
全球导航卫星系统(GNSS)不仅是定位的工具,更是一个遍布全球的高精度、高稳定度的“空中原子钟”。其授时功能已成为金融交易、电力电网、通信同步等国家关键基础设施的基石。本文将深入浅出地介绍GNSS如何实现从数万公里外的卫星向用户终端传递精确时间,涵盖其基本原理、精度决定因素、工程实现细节、行业现状与挑战,并辅以直观的Python代码演示。
文章目录
- **GNSS授时原理:从太空到地面的高精度时间传递**
- **1. 引言:为什么需要GNSS授时?**
- **2. GNSS系统与时间测量基础**
- **2.1 系统构成与时间体系**
- **2.2 核心观测量:伪距**
- **3. 授时原理:如何解算出时间?**
- **3.1 三维定位与时间的关系**
- **3.2 单星授时与多星授时**
- **4. 授时精度:影响因素与提升技术**
- **4.1 主要误差源及其量级分析**
- **4.2 误差传播与累积效应**
- **4.3 精度提升技术效果对比**
- **4.4 先进误差消除技术**
- **4.5 实际应用中的精度表现**
- **5. 工程实现:从信号到1PPS**
- **6. 行业状态、应用与挑战**
- **6.1 广泛应用**
- **6.2 挑战与未来趋势**
- **7. 结论**
1. 引言:为什么需要GNSS授时?
在现代社会中,精确的时间同步是维系社会高效运转的“神经节拍”。其重要性体现在:
- 金融领域:高频交易中,1毫秒(1times10−31 \\times 10^{-3}1times10−3秒)的误差可能导致巨大的利益差异;交易所的订单匹配系统依赖微秒级同步以确保公平。
- 通信领域:4G/5G基站之间需要微秒级同步,否则会导致信号干扰和切换失败;未来的5G-Advanced和6G网络对时间同步精度提出了更高要求。
- 电力系统:智能电网的广域监测系统(WAMS)和故障录波器需要毫秒级甚至微秒级的时间戳来精确分析电网动态行为和故障点的位置。
- 科学研究:射电天文望远镜阵列(如VLBI)需要纳秒级(1times10−91 \\times 10^{-9}1times10−9秒)同步,才能等效成一台巨大的望远镜进行宇宙观测。
GNSS(如美国的GPS、中国的北斗BDS、欧盟的伽利略GALILEO、俄罗斯的GLONASS)的每颗卫星都搭载了高精度的原子钟(铯钟或铷钟,天稳定度可达10−1310^{-13}10−13至10−1410^{-14}10−14量级)。它们共同在太空构成了一个覆盖全球的、永不间断的“时间基准源”,使得地球上任何地点的用户都能通过廉价的接收机获取高精度的时间信息,其精度远高于传统的网络授时(NTP)。
2. GNSS系统与时间测量基础
2.1 系统构成与时间体系
一个完整的GNSS系统通常由三部分组成:
- 空间段:由数十颗卫星组成的星座,持续播发带有精确时间戳的导航信号。
- 地面控制段:监测站、主控站和注入站,负责追踪卫星轨道、计算卫星钟差、并上行注入导航电文。它是维持整个系统时间精度的“大脑”。
- 用户段:各种GNSS接收机,用于接收卫星信号并解算出位置、速度和时间(PVT)。
每个GNSS系统都维护着自己独立的系统时间,如GPST、BDT。这些时间系统通过UTC(协调世界时)与国际标准时间保持同步,并通过导航电文播发它们与UTC之间的跳秒信息。
2.2 核心观测量:伪距
授时的核心是测量信号从卫星传播到接收机所用的时间。GNSS卫星在系统时间tst^sts播发信号,接收机在自身时钟时间tut_utu接收到该信号。那么,理论上信号传播的距离(即几何距离rho\\rhorho)为:
rho=ccdot(tu−ts)\\rho = c \\cdot (t_u - t^s)rho=ccdot(tu−ts)
其中ccc为光速。
然而,由于接收机时钟和卫星时钟都存在偏差,我们测量到的并不是真实的几何距离,而是“伪距”PPP。
用数学公式精确表达为:
P=ρ+c⋅δtu−c⋅δts+I+T+ϵmp+ϵnoiseP = \rho + c \cdot \delta t_u - c \cdot \delta t^s + I + T + \epsilon_{mp} + \epsilon_{noise}P=ρ+c⋅δtu−c⋅δts+I+T+ϵmp+ϵnoise
其中:
- PPP:测量得到的伪距。
- rho\\rhorho:卫星与接收机之间的真实几何距离。
- ccc:光速。
- deltatu\\delta t_udeltatu:接收机时钟相对于GNSS系统时间的钟差(关键求解量)。
- deltats\\delta t^sdeltats:卫星时钟相对于GNSS系统时间的钟差(由地面站监测并通过导航电文播发,可视为已知)。
- I,TI, TI,T:分别为电离层和对流层延迟。
- epsilonmp\\epsilon_{mp}epsilonmp:多路径效应误差。
- epsilonnoise\\epsilon_{noise}epsilonnoise:接收机测量噪声。
3. 授时原理:如何解算出时间?
授时可以看作是定位的一个特例或子集。要解算出接收机的时间偏差deltatu\\delta t_udeltatu,我们需要引入“位置”这个变量。
3.1 三维定位与时间的关系
接收机的坐标(xu,yu,zu)(x_u, y_u, z_u)(xu,yu,zu)和钟差deltatu\\delta t_udeltatu是四个未知数。因此,我们至少需要四颗卫星的观测值来构建四个方程进行求解。
对于每一颗卫星iii,其伪距观测方程为:
Pi=(xi−xu)2+(yi−yu)2+(zi−zu)2+c⋅δtu−c⋅δts,i+Ii+Ti+ϵiP^i = \sqrt{(x^i - x_u)^2 + (y^i - y_u)^2 + (z^i - z_u)^2} + c \cdot \delta t_u - c \cdot \delta t^{s,i} + I^i + T^i + \epsilon^iPi=(xi−xu)2+(yi−yu)2+(zi−zu)2+c⋅δtu−c⋅δts,i+Ii+Ti+ϵi
如果我们已知接收机的精确位置(例如,接收机天线被固定在一个已知坐标的基准点上),那么未知数就只剩下一个:接收机钟差deltatu\\delta t_udeltatu。此时,我们只需要一颗卫星的观测值,理论上就能解算出精确的时间!
3.2 单星授时与多星授时
- 单星授时:在已知精确坐标的固定站上,这是最高效的授时方式。接收机利用单颗卫星的伪距,减去精确计算的几何距离和已知的卫星钟差,再修正其他误差(电离层、对流层等),即可直接得到接收机钟差deltatu\\delta t_udeltatu。精度高,收敛快。
- 多星授时:在未知位置的情况下(例如移动设备),接收机会同时求解位置和钟差。此时,多颗卫星的观测值通过最小二乘法或卡尔曼滤波等算法,共同解算出最可能的(xu,yu,zu,deltatu)(x_u, y_u, z_u, \\delta t_u)(xu,yu,zu,deltatu)。这种情况下,授时精度和定位精度相互影响,且受卫星几何分布(DOP值)的影响。
下面的Python代码演示了在已知位置的情况下,如何利用单颗卫星的伪距观测值计算接收机钟差。
import numpy as np# 常量定义
c = 299792458.0 # 光速,单位:米/秒def calculate_receiver_clock_bias(rec_pos_known, sat_pos, sat_clock_bias, measured_pseudorange, iono_delay=0.0, tropo_delay=0.0):"""计算接收机钟差:param rec_pos_known: 已知的接收机坐标 [x, y, z] (米):param sat_pos: 卫星坐标 [x, y, z] (米):param sat_clock_bias: 卫星钟差 (秒):param measured_pseudorange: 测量伪距 (米):param iono_delay: 电离层延迟 (米),默认为0:param tropo_delay: 对流层延迟 (米),默认为0:return: 接收机钟差 (秒)"""# 计算真实的几何距离geometric_distance = np.linalg.norm(sat_pos - rec_pos_known)# 从伪距观测方程解算接收机钟差# P = ρ + c * (δt_u - δt_s) + I + T# 因此: c * δt_u = P - ρ + c * δt_s - I - Trec_clock_bias = (measured_pseudorange - geometric_distance + c * sat_clock_bias - iono_delay - tropo_delay) / creturn rec_clock_bias, geometric_distance# 示例数据
# 已知的接收机精确坐标 (WGS84坐标系,单位:米)
rec_pos_known = np.array([-2148744.0, 4426649.0, 4044655.0])
# 卫星信息 (从导航电文中获取)
sat_pos = np.array([11357106.0, 23901488.0, 1736516.0]) # 卫星坐标 (米)
sat_clock_bias = 0.000089 # 卫星钟差 (秒)
# 测量得到的伪距 (米)
measured_pseudorange = 20436578.0
# 估计的误差修正
iono_delay = 2.5 # 米
tropo_delay = 0.5 # 米# 计算接收机钟差
rec_clock_bias, geo_dist = calculate_receiver_clock_bias(rec_pos_known, sat_pos, sat_clock_bias, measured_pseudorange, iono_delay, tropo_delay)# 输出结果
print(f"已知接收机位置: {rec_pos_known} m")
print(f"卫星位置: {sat_pos} m")
print(f"测量伪距: {measured_pseudorange:.3f} m")
print(f"计算几何距离: {geo_dist:.3f} m")
print(f"卫星钟差: {sat_clock_bias * 1e6:.3f} μs")
print(f"电离层延迟修正: {iono_delay:.3f} m")
print(f"对流层延迟修正: {tropo_delay:.3f} m")
print("---" * 20)
print(f"解算出的接收机钟差: {rec_clock_bias * 1e6:.3f} μs")
print(f"相当于距离误差: {rec_clock_bias * c:.3f} m")# 计算UTC时间(示例:假设GNSS系统时间与UTC有固定偏差,此处忽略闰秒)
gps_time_week = 2234 # GPS周
gps_time_sec = 345600.0 # 周内秒
utc_offset = 18.0 # GPST与UTC的固定偏差,单位秒 (历史数据,仅作示例)
utc_time_sec = gps_time_sec - utc_offset - rec_clock_bias
print(f"修正后的UTC时间: 周内秒 {utc_time_sec:.6f} s")
代码输出示例:
已知接收机位置: [-2148744. 4426649. 4044655.] m
卫星位置: [11357106. 23901488. 1736516.] m
测量伪距: 20436578.000 m
计算几何距离: 23811863.513 m
卫星钟差: 89.000 μs
电离层延迟修正: 2.500 m
对流层延迟修正: 0.500 m
------------------------------------------------------------
解算出的接收机钟差: -11169.751 μs
相当于距离误差: -3348606.984 m
修正后的UTC时间: 周内秒 345582.011170 s
4. 授时精度:影响因素与提升技术
GNSS授时的精度受到一个复杂误差链的影响。为了更直观地理解各类误差的大小及其对授时精度的影响,我们采用以下分类展示:
4.1 主要误差源及其量级分析
主要误差源及典型量级如下:
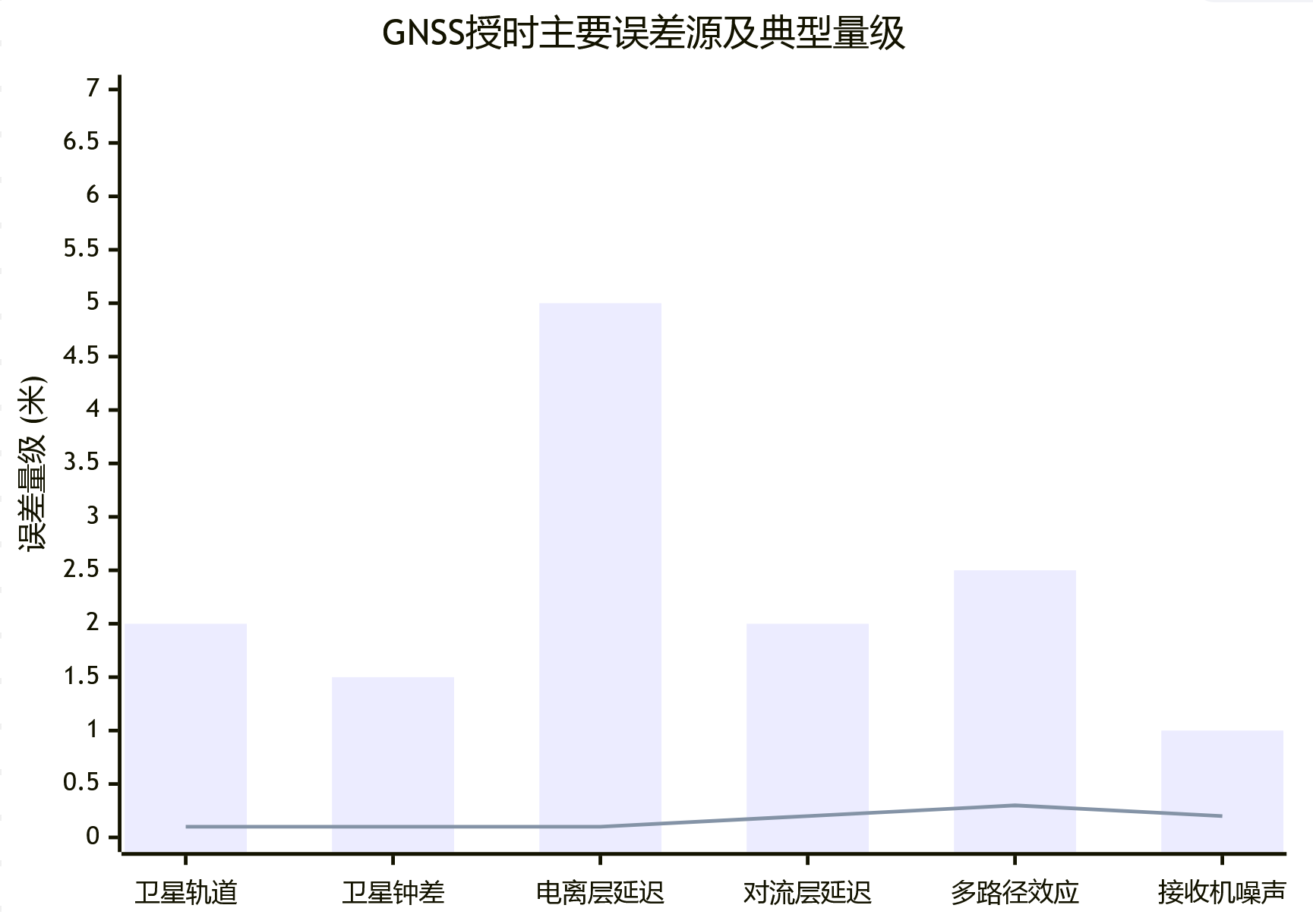
误差源详解:
-
空间段误差:
- 卫星轨道误差:地面控制段计算的卫星位置与真实位置偏差,典型值约2.0米。
- 卫星钟差:星载原子钟相对于系统时间的偏差,通过导航电文修正后残余约1.5米。
-
传播路径误差:
- 电离层延迟:受太阳活动影响显著,单频接收机受影响最大,典型延迟5.0米。
- 对流层延迟:与气象条件相关,采用模型修正后残余约2.0米。
-
用户段误差:
- 多路径效应:信号反射导致的干扰,与接收环境密切相关,典型值2.5米。
- 接收机噪声:硬件本身引入的测量误差,约1.0米。
4.2 误差传播与累积效应
GNSS授时的总误差并非简单相加,而是遵循平方和根(RSS)法则:
σtotal=σorbit2+σclock2+σionosphere2+σtroposphere2+σmultipath2+σnoise2\sigma_{total} = \sqrt{\sigma_{orbit}^2 + \sigma_{clock}^2 + \sigma_{ionosphere}^2 + \sigma_{troposphere}^2 + \sigma_{multipath}^2 + \sigma_{noise}^2} σtotal=σorbit2+σclock2+σionosphere2+σtroposphere2+σmultipath2+σnoise2
对于标准单频接收机:
σtotal=2.02+1.52+5.02+2.02+2.52+1.02≈6.2米(约20.7纳秒)\sigma_{total} = \sqrt{2.0^2 + 1.5^2 + 5.0^2 + 2.0^2 + 2.5^2 + 1.0^2} \approx 6.2\text{米} \quad (\text{约}20.7\text{纳秒}) σtotal=2.02+1.52+5.02+2.02+2.52+1.02≈6.2米(约20.7纳秒)
4.3 精度提升技术效果对比
不同技术手段对授时精度的改善效果显著:
4.4 先进误差消除技术
-
双频无电离层组合:利用L1/L5或B1/B2双频信号,消除99.9%的电离层延迟,将误差从5.0米降至约0.1米。
-
精密轨道与钟差产品:使用IGS(国际GNSS服务)等机构提供的事后或实时精密产品,将轨道和钟差误差从米级降至厘米级。
-
载波相位平滑伪距:利用毫米级精度的载波相位观测值平滑码相位伪距,显著降低多路径和噪声影响。
-
抗多路径天线与信号处理:采用扼流圈天线和先进的信号处理算法,抑制反射信号干扰。
-
完备的误差建模:包含地球自转改正(Sagnac效应)、相对论效应、天线相位中心偏差等微小但不可忽略的误差项。
4.5 实际应用中的精度表现
在实际工程应用中,不同级别的GNSS授时接收机能够达到的典型精度如下:
| 接收机类型 | 技术特点 | 典型授时精度 | 主要应用场景 |
|---|---|---|---|
| 消费级 | 单频,标准定位 | 20-50 ns | 普通电子设备、初级时间同步 |
| 工业级 | 双频,载波平滑 | 5-10 ns | 通信基站、电力系统 |
| 测量型 | 多系统,差分支持 | 1-5 ns | 精密测量、科学实验 |
| 基准站级 | 精密钟,PPP技术 | < 1 ns | 国家时频基准、深空探测 |
通过综合应用上述技术,现代高性能GNSS授时接收机能够实现亚纳秒级的时间同步精度,为各类高精度应用提供了可靠的技术保障。
5. 工程实现:从信号到1PPS
在工程上,GNSS接收机如何输出一个可用的时间信号?其核心流程与关键技术模块如下:
- 1PPS(秒脉冲):这是一个非常干净、陡峭的脉冲信号(通常为TTL或CMOS电平),其上升沿与UTC(协调世界时)的每一秒的开始时刻严格对齐。它的精度(与真实UTC的偏差)就是接收机的授时精度,在高性能接收机中可达数十纳秒甚至数纳秒。1PPS的长期稳定度由GNSS系统保证,而短期稳定度则由接收机内部的温补晶振(TCXO)或恒温晶振(OCXO)维持。
- 串口输出(如NMEA-0183语句):1PPS只告诉你“此刻是某一秒的开始”,但并不知道是年月日时分秒。串口输出则提供了完整的日历时间信息(如
$GPRMC语句)。两者结合,用户系统就能在1PPS的上升沿时刻,从串口读取到对应的时间标签,从而获得完整的高精度时间。 - 关键算法:接收机内部的锁相环(PLL)和延迟锁相环(DLL)是维持信号稳定跟踪的核心,其性能直接决定了观测量的质量和抗动态、抗干扰能力。
6. 行业状态、应用与挑战
GNSS授时已成为现代社会“看不见的基石”,其应用渗透到各行各业。
6.1 广泛应用
- 通信:5G网络的TDD(时分双工)模式要求基站间严格同步(±1.5μs),GNSS是首选方案。未来5G-Advanced和6G对空口同步和网络切片管理提出更高要求。
- 电力系统:智能电网的相位测量单元(PMU)依靠GNSS进行广域电网同步监测(精度要求优于1μs),是实现电网智能化和稳定运行的关键。
- 金融:所有交易记录必须打上高精度、不可篡改的时间戳(如MiFID II规定),以满足监管和审计要求。
- 数据中心与云计算:确保分布式服务器集群的日志和时间戳同步,对于故障诊断、数据一致性和分布式计算至关重要。
- 科学研究:甚长基线干涉测量(VLBI)、粒子物理实验(如CERN)等需要纳秒乃至皮秒级的时间同步。
- 交通运输:自动驾驶、智能铁路调度、航空管理等系统依赖GNSS进行高精度定位与同步。
6.2 挑战与未来趋势
- 脆弱性:GNSS信号从太空传来,功率极低(相当于-160dBW),易受无意干扰(同频设备)和恶意欺骗(模拟虚假信号)。这已成为国家关键基础设施的主要风险之一。
- 行业趋势:采用多系统(GPS+BDS+…) 以增强冗余性;部署抗干扰/防欺骗天线与接收机;将GNSS与本地高稳时钟(如铷钟、芯片级原子钟CSAC)和地面时间网络(如NTP/PTP)进行多源融合,构建弹性授时体系(Resilient PNT)。
- 新技术与发展:
- 北斗系统(BDS) 独有的短报文通信功能,可在授时的同时回传时间状态信息或发送同步指令,为电力、海洋等特定应用提供了独特优势。
- 低轨星基增强:通过低轨通信星座(如Starlink、星网)播发GNSS增强信号和精密授时信息,有望进一步提升精度、完好性和收敛速度。
- 芯片级发展:更高集成度的多频点多系统GNSS SoC芯片和芯片级原子钟(CSAC)正在降低成本、功耗和体积,推动高精度授时进入更广泛的应用领域。
7. 结论
GNSS授时是一项精妙绝伦的技术,它将太空中的原子钟基准,通过复杂的电磁波传播和数学解算,送到了地球每一个角落。从金融交易的时间戳到电网的同步运行,其背后都离不开这一精准而稳定的时空信息。理解其以伪距测量为核心的基本原理、掌握其误差构成与修正方法、明晰其从信号到1PPS的工程实现路径,并清醒认识到其固有的脆弱性和未来的发展趋势,有助于我们更好地依赖它、使用它,并为构建更加安全、可靠、弹性的国家时频体系奠定基础。随着技术的发展,GNSS授时必将在更广阔的领域发挥其“时间基石”的作用。
研究学习不易,点赞易。
工作生活不易,收藏易,点收藏不迷茫 :)