[科普] 卫星共视授时原理
卫星共视授时原理:如何在千里之外保持“步调一致”
摘要
在当今高度信息化的社会,从金融交易、电力电网到移动通信、导航定位,无一不需要精确的时间基准。我们如何确保北京和纽约的两台计算机,乃至全球的无数设备,能够拥有统一、精准的时间?卫星共视授时技术正是解决这一难题的关键方法之一。本文将从时间测量的基础出发,深入浅出地介绍卫星共视授时的核心原理、所能达到的惊人精度、工程实现手段以及当前的行业应用状态,并辅以Python代码演示,帮助读者全方位理解这一“时空对齐”的奥秘。
文章目录
- 卫星共视授时原理:如何在千里之外保持“步调一致”
- 摘要
- 第一章:引言——为什么我们需要如此精确的时间?
- 第二章:时间测量基础与共视的核心思想
- 2.1 卫星单向授时模型
- 2.2 共视法的巧妙之处
- 第三章:授时精度——究竟能有多准?
- 第四章:工程实现——如何将其变为现实?
- 第五章:行业状态与应用
- 第六章:Python代码演示
- 第七章:结论与展望
第一章:引言——为什么我们需要如此精确的时间?
想象一下,两位相隔千里的宇航员需要完成一次精准的太空对接,他们的时钟哪怕只有百万分之一秒的误差,都可能导致灾难性的后果。在更贴近生活的场景中,当我们在手机地图上进行导航时,手机需要接收来自至少四颗GPS卫星的信号。每颗卫星都在不停地广播“我是什么时间发出的信号”,手机通过计算信号到达的时间差,才能反算出自己的精确位置。1微秒(百万分之一秒)的时间误差,将直接导致300米的位置误差!
因此,高精度时间同步是现代科技的“神经中枢”。而卫星共视(Common-View)正是一种能够实现纳秒(十亿分之一秒)级别时间比对的强大技术。
第二章:时间测量基础与共视的核心思想
2.1 卫星单向授时模型
要理解“共视”,我们先看简单的“单向”授时。以GPS为例:
- 卫星上搭载着极其精准的原子钟,它持续广播包含“发送时刻 t s v t_{sv} tsv”的信号。
- 地面站A接收到该信号,记录下自己的接收时刻 t r x _ a t_{rx\_a} trx_a。
- 如果卫星钟和地面站钟是完美同步的,那么信号传播时间 τ a = t r x _ a − t s v \tau_a = t_{rx\_a} - t_{sv} τa=trx_a−tsv,再乘以光速 c c c,就是两者之间的几何距离。
但现实是,两个钟都有误差。设卫星钟的误差为 δ t s a t \delta t^{sat} δtsat,地面站A的钟误差为 δ t a \delta t_a δta。那么,伪距观测方程可以简化为:
P a = ρ a + c ⋅ ( δ t a − δ t s a t ) + ϵ a P_a = \rho_a + c \cdot (\delta t_a - \delta t^{sat}) + \epsilon_a Pa=ρa+c⋅(δta−δtsat)+ϵa
其中:
- P a = c ⋅ ( t r x _ a − t s v ) P_a = c \cdot (t_{rx\_a} - t_{sv}) Pa=c⋅(trx_a−tsv) 是测量得到的伪距。
- ρ a \rho_a ρa 是卫星与地面站A的真实几何距离。
- ϵ a \epsilon_a ϵa 包含了大气延迟、相对论效应、噪声等其他所有误差。
从这个方程可以看出,我们无法从单个地面站的单次观测中,将卫星钟误差 δ t s a t \delta t^{sat} δtsat 和本地钟误差 δ t a \delta t_a δta 分离开来。
2.2 共视法的巧妙之处
共视法的核心思想非常巧妙:“既然我们都有同一个‘麻烦’(卫星钟差),那就让它成为我们之间的‘纽带’。”
假设有两个地面站A和B,它们想要比较彼此钟的差异 ( δ t a − δ t b ) (\delta t_a - \delta t_b) (δta−δtb)。
- 同时观测:A站和B站在同一时刻(在GPS时间尺度上)观测同一颗卫星S。
- 各自建立方程:
- A站: P a = ρ a + c ⋅ ( δ t a − δ t s a t ) + ϵ a P_a = \rho_a + c \cdot (\delta t_a - \delta t^{sat}) + \epsilon_a Pa=ρa+c⋅(δta−δtsat)+ϵa
- B站: P b = ρ b + c ⋅ ( δ t b − δ t s a t ) + ϵ b P_b = \rho_b + c \cdot (\delta t_b - \delta t^{sat}) + \epsilon_b Pb=ρb+c⋅(δtb−δtsat)+ϵb
- 做差消除公共误差:将两个方程相减:
P a − P b = ( ρ a − ρ b ) + c ⋅ ( δ t a − δ t b ) + ( ϵ a − ϵ b ) P_a - P_b = (\rho_a - \rho_b) + c \cdot (\delta t_a - \delta t_b) + (\epsilon_a - \epsilon_b) Pa−Pb=(ρa−ρb)+c⋅(δta−δtb)+(ϵa−ϵb)
奇迹发生了!卫星钟误差 δ t s a t \delta t^{sat} δtsat 在相减过程中被完全消除了!
现在,我们得到了一个只包含两地钟差、几何距离差和其他残余误差的方程。通过精密的模型(如卫星精密星历)可以非常准确地计算出 ρ a \rho_a ρa 和 ρ b \rho_b ρb,从而得到 ( ρ a − ρ b ) (\rho_a - \rho_b) (ρa−ρb)。残余误差 ( ϵ a − ϵ b ) (\epsilon_a - \epsilon_b) (ϵa−ϵb) 也可以通过模型修正大部分。
最终,我们就能高精度地解算出两个地面站之间的钟差:
c ⋅ ( δ t a − δ t b ) ≈ ( P a − P b ) − ( ρ a − ρ b ) c \cdot (\delta t_a - \delta t_b) \approx (P_a - P_b) - (\rho_a - \rho_b) c⋅(δta−δtb)≈(Pa−Pb)−(ρa−ρb)
一个生动的比喻:这就像两个人在不同的地方收听同一个中央广播电台的报时信号。他们各自的手表(本地钟)与广播里的“标准时间”(卫星钟)都有偏差。但当他们互相通话,告诉对方自己听到报时信号时,自己手表的读数是多少时,他们就能立刻知道彼此手表的快慢差异,而无需知道广播电台的钟到底有多准。
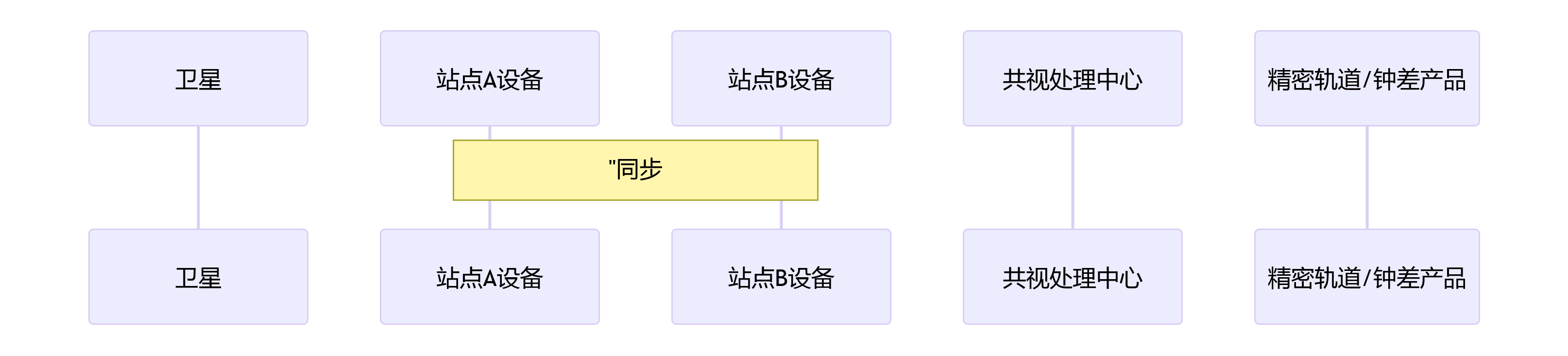
下面的流程图清晰地展示了这一过程:
第三章:授时精度——究竟能有多准?
卫星共视授时的精度令人惊叹,通常可以达到1到10纳秒的水平。
为什么能达到如此高的精度?关键在于误差的消除与削弱:
| 误差源 | 对单向授时的影响 | 在共视法中的处理效果 |
|---|---|---|
| 卫星钟误差 | 直接影响,是主要误差源 | 被完美消除 |
| 卫星轨道误差 | 导致几何距离计算不准 | 在两地做差后,大部分被抵消(尤其对于中长基线) |
| 电离层延迟 | 与信号频率有关,影响显著 | 使用双频观测可绝大部分消除 |
| 对流层延迟 | 与当地气象有关,难以建模 | 在两地做差后,部分抵消,剩余部分通过模型修正 |
| 接收机噪声 | 引入随机误差 | 无法消除,但可通过长时间平滑来削弱 |
精度提升的秘诀:
- 多星共视:同时观测多颗卫星,取平均,减少随机误差。
- 长时间平滑:进行数小时甚至数天的连续观测,通过平均大幅降低噪声。
- 精密产品:使用IGS(国际GNSS服务)提供的精密卫星钟差和轨道产品,可以进一步将精度推向1纳秒以内,甚至达到100皮秒量级。
第四章:工程实现——如何将其变为现实?
一套完整的卫星共视授时系统,离不开以下几个关键组成部分:
- GNSS接收机:核心测量设备。需要能够接收GPS、GLONASS、北斗、Galileo等一个或多个卫星导航系统的信号,并输出高精度的伪距和载波相位观测值。
- 高稳定度频率源:通常是高性能的铷原子钟或氢原子钟。它为本地接收机提供稳定、低噪声的时间频率基准,是保证短期稳定度的关键。
- 时间间隔计数器:用于精确测量本地钟与接收机输出的1PPS(每秒一个脉冲)信号之间的偏差。
- 数据处理中心:
- 数据采集:从接收机和计数器收集观测数据和本地钟差数据。
- 数据传输:通过互联网或专网,将数据发送到共视比对中心。
- 数据解算:应用共视算法,利用精密星历和钟差产品,计算与其他站点的钟差。
- 共视比对平台:一个中央服务器,负责收集所有参与站的数据,进行集中处理,并生成和发布最终的钟差结果。
其工作流程可以概括为以下序列图:
第五章:行业状态与应用
卫星共视是目前国际上进行高精度时间比对的主流技术。
- 国际原子时(TAI)的建立:全球各地的守时实验室(如美国USNO、中国NTSC、德国PTB等)通过共视法,将各自维持的本地原子时间尺度进行比对,数据汇总到国际权度局(BIPM),最终加权平均产生全球统一的国际原子时。
- 北斗/GPS系统自身的时间同步:导航卫星系统自身的监测站之间,也需要通过共视等技术来维持系统时间的同步。
- 金融交易:高频交易中,订单的时间戳精度至关重要,共视技术可用于同步不同交易所的时钟。
- 基础科学研究:射电天文中的甚长基线干涉测量(VLBI)、大型粒子对撞机等,都需要纳秒级的时间同步。
- 5G通信:5G中的很多关键技术如协同多点传输,需要基站间严格的时间同步。
第六章:Python代码演示
下面我们用一个简化的Python代码来模拟共视授时的核心计算过程。这里我们忽略了大气延迟等次要误差,只关注核心的几何关系和钟差计算。
import numpy as np# 设定光速,单位:米/秒
c = 299792458.0# 假设场景:一颗卫星和两个地面站A, B
# 我们已知卫星和两站的精确位置(地心地固坐标系,单位:米)
satellite_pos = np.array([20000000, 0, 0]) # 卫星在X轴上
station_a_pos = np.array([6378000, 0, 0]) # 站A在X轴地表
station_b_pos = np.array([0, 6378000, 0]) # 站B在Y轴地表# 计算真实的几何距离
true_rho_a = np.linalg.norm(satellite_pos - station_a_pos)
true_rho_b = np.linalg.norm(satellite_pos - station_b_pos)print(f"真实几何距离 - 站A: {true_rho_a:.2f} m, 站B: {true_rho_b:.2f} m")# 假设存在钟差
# 卫星钟比标准时间快0.0001秒 (100微秒)
delta_t_sat = 0.0001
# 站A的钟比标准时间慢0.00002秒 (20微秒)
delta_t_a = -0.00002
# 站B的钟比标准时间快0.00003秒 (30微秒)
delta_t_b = 0.00003print(f"\n预设钟差:")
print(f"卫星钟差: {delta_t_sat * 1e6:.2f} 微秒")
print(f"站A钟差: {delta_t_a * 1e6:.2f} 微秒")
print(f"站B钟差: {delta_t_b * 1e6:.2f} 微秒")
print(f"两站真实钟差(A-B): {(delta_t_a - delta_t_b) * 1e6:.2f} 微秒")# 模拟测量伪距 (包含钟差影响)
# 伪距 = 真实几何距离 + 光速 * (接收机钟差 - 卫星钟差)
measured_pseudo_a = true_rho_a + c * (delta_t_a - delta_t_sat)
measured_pseudo_b = true_rho_b + c * (delta_t_b - delta_t_sat)print(f"\n测量得到的伪距:")
print(f"站A伪距: {measured_pseudo_a:.2f} m")
print(f"站B伪距: {measured_pseudo_b:.2f} m")# 共视法计算
# 假设我们通过精密星历知道了精确的几何距离 true_rho_a 和 true_rho_b
# 计算伪距之差
delta_pseudo = measured_pseudo_a - measured_pseudo_b
# 计算几何距离之差
delta_rho = true_rho_a - true_rho_b# 根据共视公式: delta_pseudo = delta_rho + c * (delta_t_a - delta_t_b)
calculated_clock_diff = (delta_pseudo - delta_rho) / cprint(f"\n---共视法计算结果---")
print(f"伪距之差 (Pa-Pb): {delta_pseudo:.2f} m")
print(f"几何距离之差 (ρa-ρb): {delta_rho:.2f} m")
print(f"计算得到的两站钟差(A-B): {calculated_clock_diff * 1e6:.2f} 微秒")
print(f"与真实钟差对比,误差: {((delta_t_a - delta_t_b) - calculated_clock_diff) * 1e12:.2f} 皮秒")# 验证:卫星钟差是否被消除?
# 如果我们直接用伪距计算,而不使用共视法,会怎样?
# 尝试从站A的伪距单独估算其钟差 (假设卫星钟差未知,设为0)
# estimated_delta_t_a_wrong = (measured_pseudo_a - true_rho_a) / c + delta_t_sat # 错误的方法
# 正确的方法应该是意识到方程里有两个未知数。这展示了没有共视时,无法分离误差。
print(f"\n---对比:单站授时的困境---")
print("如果仅从站A的伪距反推钟差,且忽略卫星钟差,我们会得到:")
wrong_delta_t_a_estimate = (measured_pseudo_a - true_rho_a) / c
print(f"错误的站A钟差估计值: {wrong_delta_t_a_estimate * 1e6:.2f} 微秒")
print(f"这与真实值({delta_t_a * 1e6:.2f} 微秒)相差甚远,因为它包含了卫星钟差!")
运行结果分析:
真实几何距离 - 站A: 13622000.00 m, 站B: 20992352.99 m预设钟差:
卫星钟差: 100.00 微秒
站A钟差: -20.00 微秒
站B钟差: 30.00 微秒
两站真实钟差(A-B): -50.00 微秒测量得到的伪距:
站A伪距: 13586024.91 m
站B伪距: 20971367.52 m---共视法计算结果---
伪距之差 (Pa-Pb): -7385342.61 m
几何距离之差 (ρa-ρb): -7370352.99 m
计算得到的两站钟差(A-B): -50.00 微秒
与真实钟差对比,误差: 0.00 皮秒---对比:单站授时的困境---
如果仅从站A的伪距反推钟差,且忽略卫星钟差,我们会得到:
错误的站A钟差估计值: -120.00 微秒
这与真实值(-20.00 微秒)相差甚远,因为它包含了卫星钟差!
如上结果,当你运行这段代码时,你会看到计算出的两站钟差与预设的真实钟差高度一致,误差仅在皮秒量级(这主要源于计算机的浮点数精度),而尝试用单站数据估算钟差则完全失败。这有力地证明了共视法在消除公共误差方面的卓越能力。
第七章:结论与展望
卫星共视授时技术,以其巧妙的“共同观察、求差消除”的思想,成功地将全球各地的时间基准连接在一起,实现了纳秒级的高精度时间同步。它不仅是维系全球统一时间系统的基石,也深度支撑着从基础科学到现代经济的众多关键领域。
展望未来,随着卫星导航系统(如中国的北斗三号)性能的持续提升,以及数据处理算法的不断优化,共视授时的精度、可靠性和实时性将再上新台阶。它与新兴的激光时间传递、光纤时间传递等技术相辅相成,共同构建起一张覆盖全球、更加精准、更加稳固的“时空基准网”,为人类探索未知和创造未来提供最根本的保障。
研究学习不易,点赞易。
工作生活不易,收藏易,点收藏不迷茫 :)