具身智能数据采集全方案:动作捕捉技术驱动机器人拟人化进阶
近日,在小鹏科技日上,一台能够自如走起“猫步”的IRON人形机器人惊艳全场。其动作流畅自然,姿态高度拟真,赢得观众掌声。CEO何小鹏坦言,这短短几十步的背后,是研发团队长达七年的持续投入。这一场景生动揭示出:人形机器人正从实验室走向现实应用,而其动作的“拟人化”程度,已成为衡量技术成熟度与实用价值的关键指标。
随着人形机器人在汽车制造、物流搬运、3C装配乃至井下作业、商业服务等场景逐步落地,如何让机器人动作更自然、更精准、更适应多样化任务,成为行业共同挑战。动作数据作为机器人行为决策的基础,其质量与多样性直接决定了机器人的表现上限。因此,高效、精准、可扩展的动作数据采集与转化方案,已成为推动具身智能发展的核心驱动力。
在构建机器人动作模型的过程中,动作捕捉技术凭借其高精度、高效率、高还原度的特点,成为采集人类动作数据、实现机器人拟人化行为的重要技术路径。它能够将人体运动轨迹实时数字化,为机器人提供丰富、连续、符合人体工学的动作样本,大幅缩短机器人动作学习与优化的周期。
在此背景下,具身智能数据采集方案,正是在基于动作捕捉技术下,实现了从人类动作到机器人可执行数据的高效转化。该方案融合了无穿戴动捕与惯性动捕两种技术路径,适应不同精度与场景需求。其核心流程是通过精准捕捉真人动作,再经由数据转化系统处理,输出适用于机器人强化学习或二次开发的数据文件,并围绕这一流程,可提供以下四项核心服务:
1. 即用动作数据包:提供包含舞蹈才艺、基础肢体动作、精细化操作、场景化交互等在内的多类高质量动作数据。所有数据均经真人捕捉与专业修正,即付即用。用户通过简单二次开发即可快速复现动作,显著节省前期数据采集的时间与人力成本。
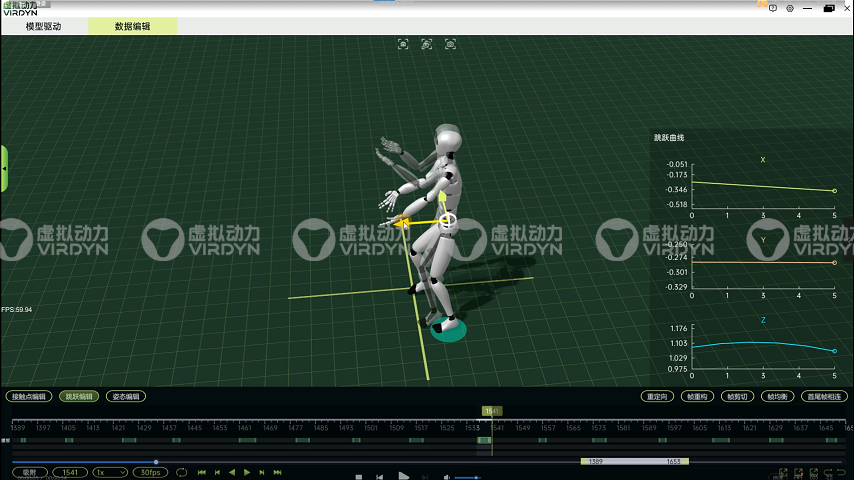
2. 一体式数据转化软件:对于有个性化动作需求的客户,可搭配动捕设备与系统自行采集动作。该软件支持机器人模型的重定向映射与数据精修,实现“即采即修”,有效提升数据采集效率,降低反复沟通的成本。
3. 定制化动作代录制:针对特定动作需求,与专业动捕演员合作,可完成舞蹈、武术等高难度动作的精准捕捉。同时,还可提供高精度光学动捕场地租赁服务,满足对数据质量的极致要求。
4. 仿真案例工程文件搭建:针对宇树G1机器人开放的仿真平台及模型,该技术团队已打通从自研动捕设备到仿真模型驱动的全链路。开发者通过穿戴惯性动捕设备,即可直接驱动仿真模型进行数据采集与测试,加速算法迭代。

具身智能数据采集方案,通过成熟的动作捕捉技术与灵活的数据服务模式,直击人形机器人动作数据采集难、成本高、效率低的行业痛点。无论是即拿即用的数据包,还是支持自定义采集的软硬件系统,亦或是专业的定制服务与仿真支持,我们致力于为机器人研发团队提供全面、高效的数据解决方案,助力您的机器人在拟人化道路上稳步前行,在多元场景中实现更精准、更自然的智能行为。