基于球面透视投影模型的鱼眼图像校正算法matlab仿真
目录
1.前言
2.算法运行效果图预览
3.算法运行软件版本
4.部分核心程序
5.算法理论概述
6.参考文献
7.算法完整程序工程
1.前言
鱼眼镜头因超大视场角(通常可达180°以上)在机器人视觉、自动驾驶、安防监控等领域应用广泛,但成像过程中会产生严重的桶形畸变,导致直线变为曲线、物体形状与尺寸失真,需通过校正算法恢复正常透视效果。球面透视投影模型是鱼眼图像校正的经典方法之一,其核心是通过建立鱼眼镜头成像的球面中间模型,反向映射至理想透视图像,校正精度高且物理意义明确。
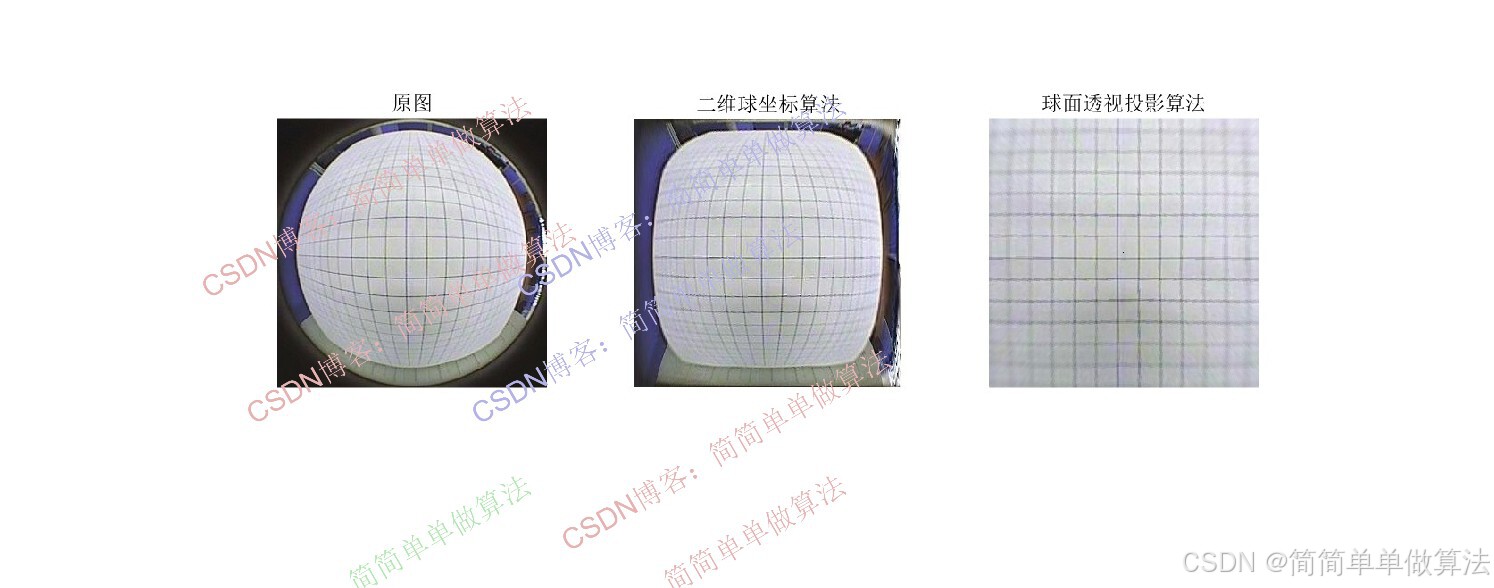
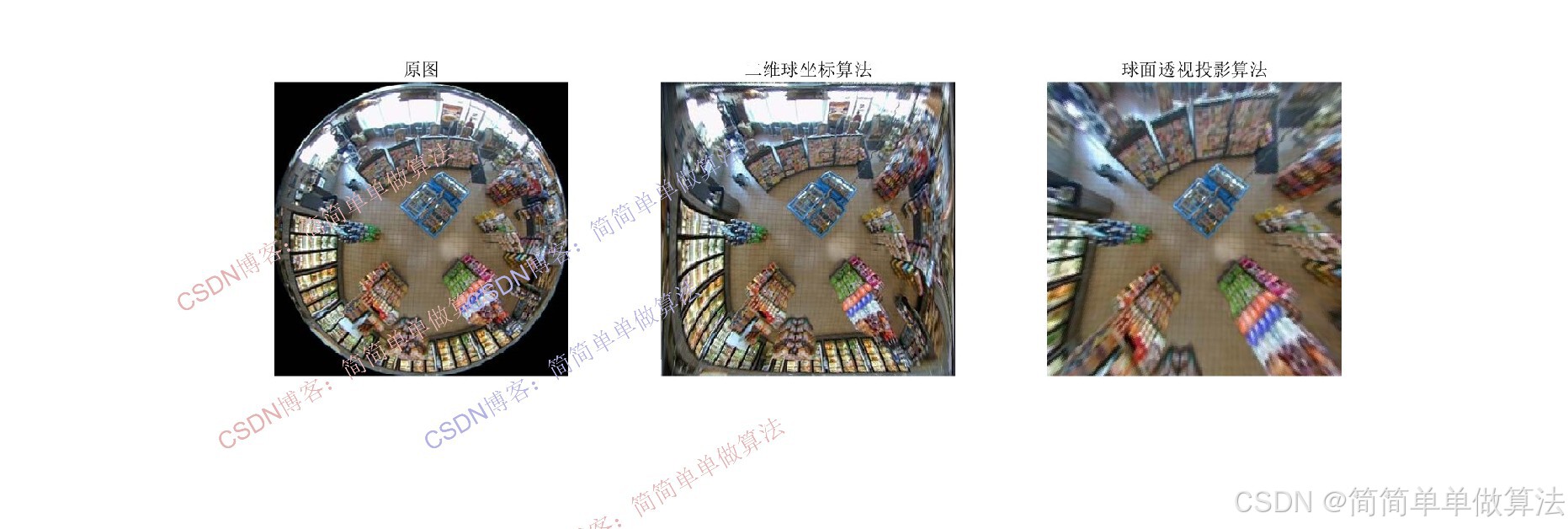
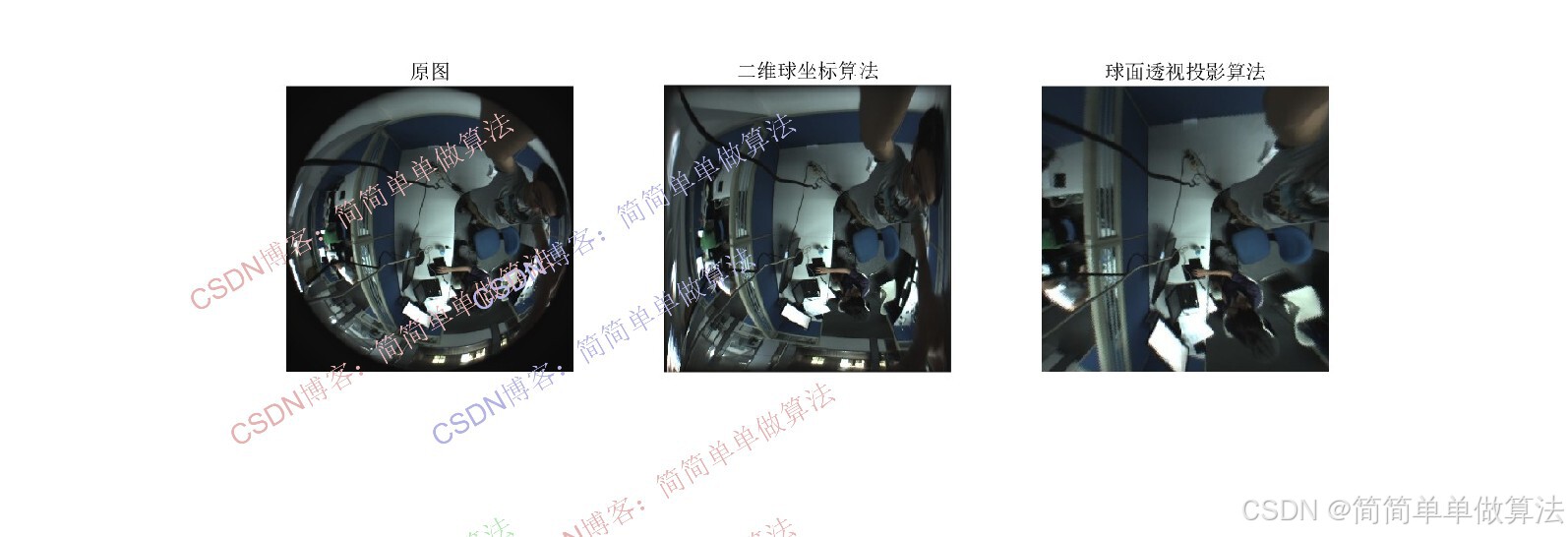
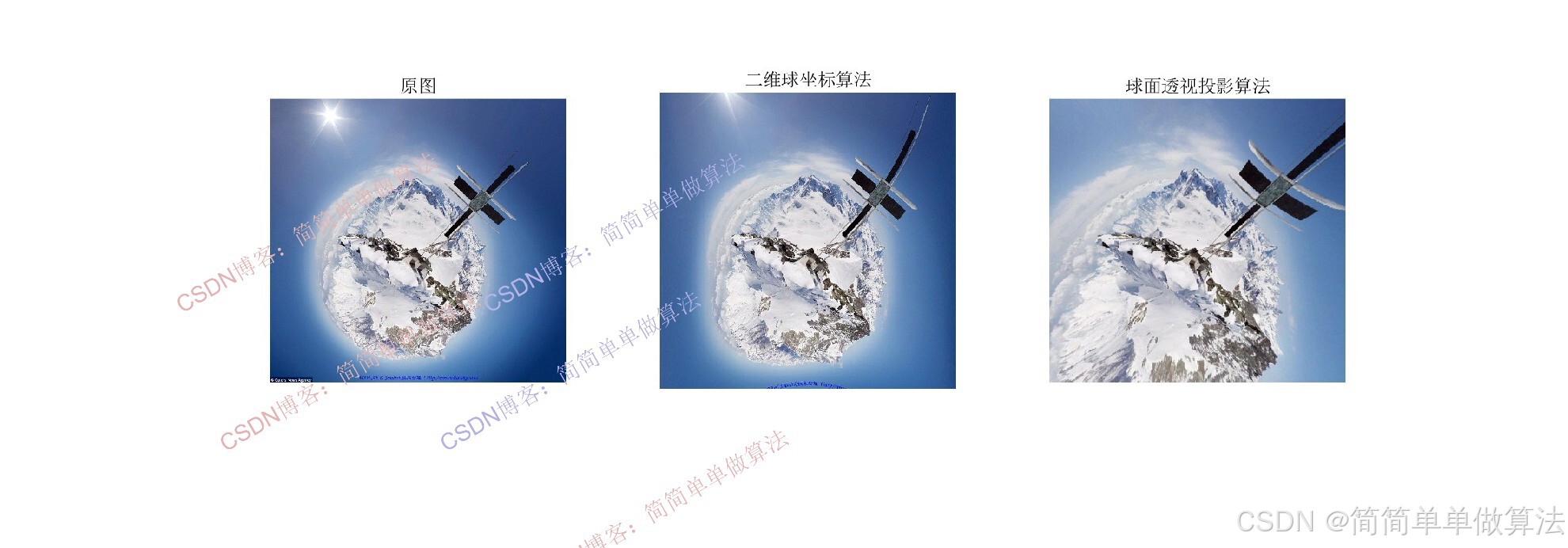
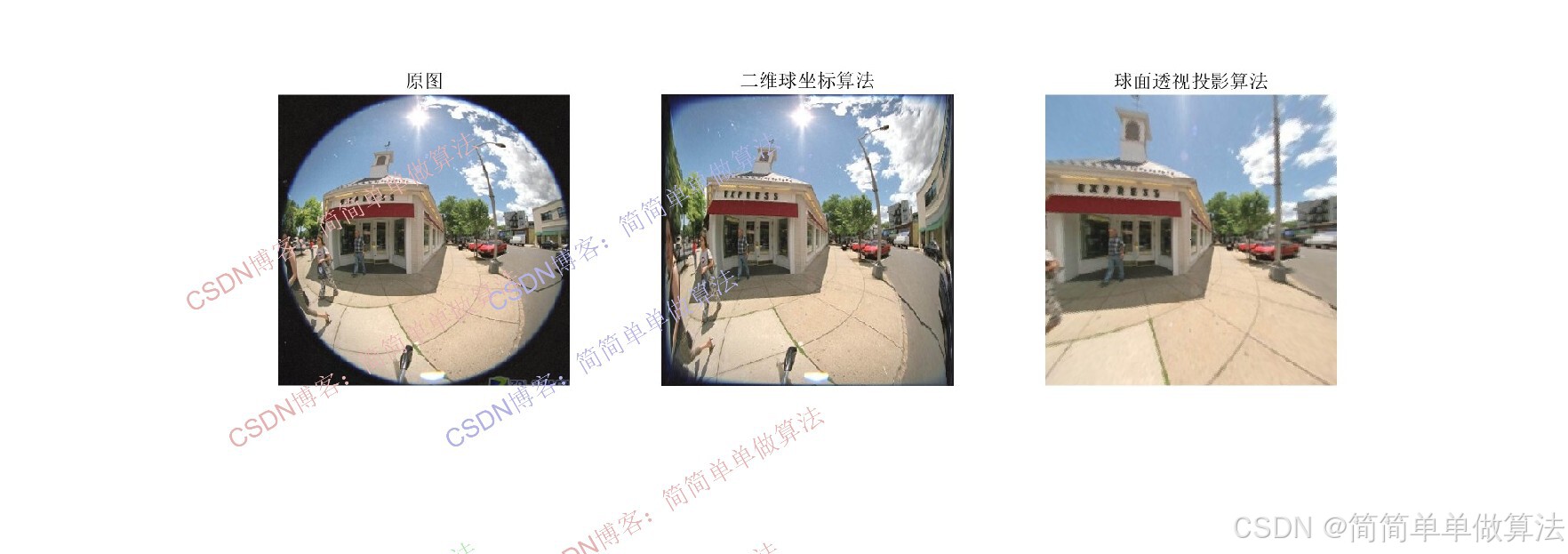
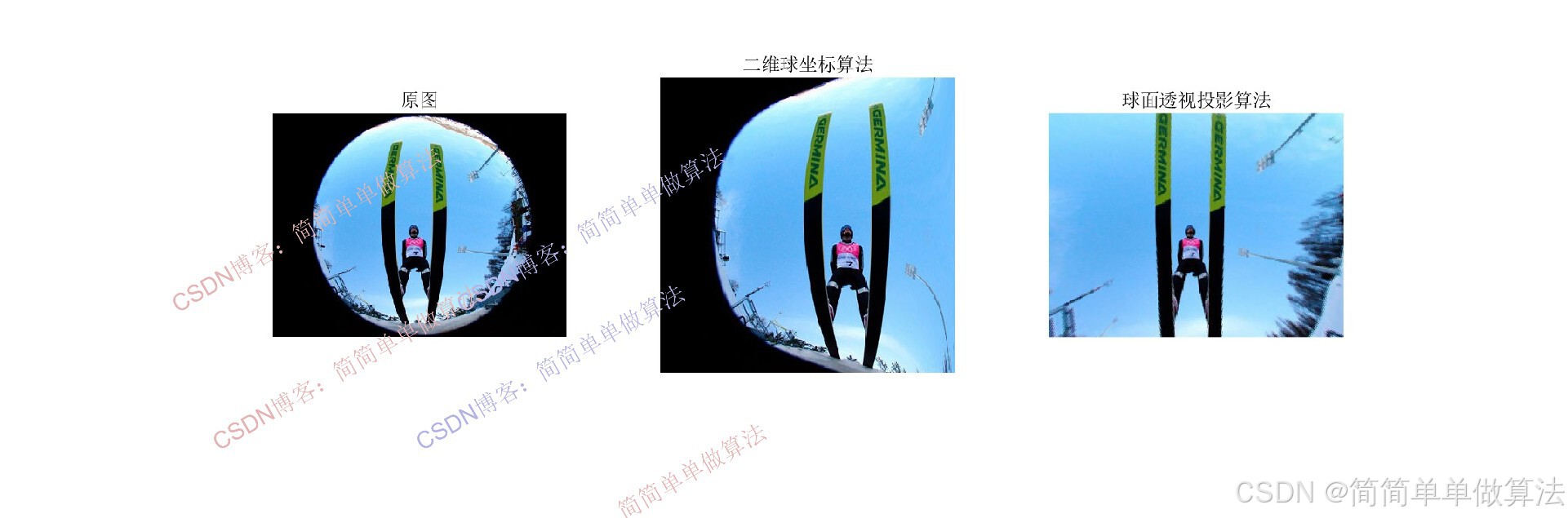
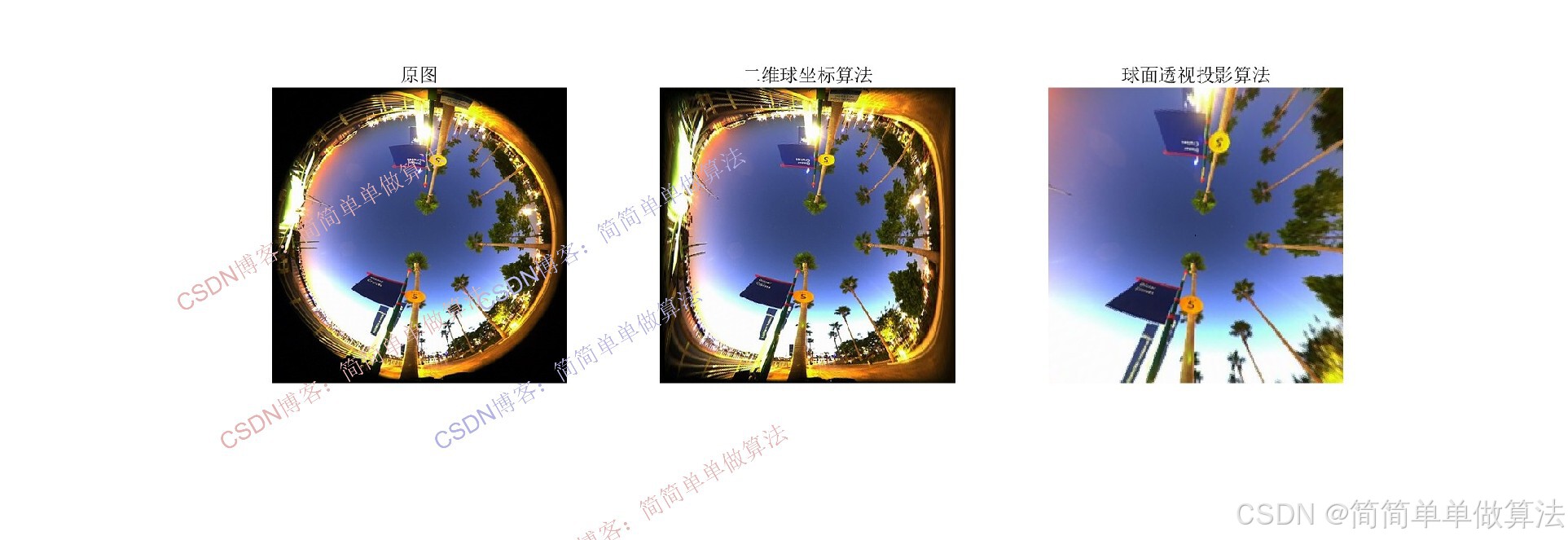
2.算法运行效果图预览
(完整程序运行后无水印)
3.算法运行软件版本
Matlab2024b(推荐)或者matlab2022a
4.部分核心程序
(完整版代码包含中文注释和操作步骤视频)
% 判断坐标是否超出原始图像范围if(us<=0)||(us>CC)||(vs<=0)||(vs>RR)test1(i,j,:)=0; % 超出范围时,输出像素设为黑色(0)% 当坐标在原始图像内部且非边缘时,进行双线性插值elseif(us > 1) && (us <CC) && (vs> 1) && (vs <RR)uu = u+u0; % 原始图像中的精确行坐标(未取整)vv = v+v0; % 原始图像中的精确列坐标(未取整)a = double(uint16(uu)); % 取uu的整数部分(行索引)b = double(uint16(vv)); % 取vv的整数部分(列索引)% 获取周围四个像素的像素值x11 = double(test0(a,b,:)); x12 = double(test0(a,b+1,:)); x21 = double(test0(a+1,b,:)); x22 = double(test0(a+1,b+1,:)); % 双线性插值计算当前输出像素值,并转换为uint8类型test1(i,j,:) = uint8( (b+1-vv) * ((uu-a)*x21 + (a+1-uu)*x11) + (vv-b) * ((uu-a)*x22 +(a+1-uu) * x12) ); else test1(i,j,:) = test0(us,vs,:); % 边缘像素直接取原始图像对应位置的像素值end
5.算法理论概述
鱼眼镜头的成像可等效为“空间光线先投射到一个虚拟的单位球面(球心与镜头光学中心重合),再从球面投影到鱼眼图像平面”。该假设的物理依据是,鱼眼镜头的畸变源于光线在镜头光学表面的折射,而虚拟球面可等效替代这一复杂折射过程,将非线性映射分解为“空间点→球面点” 的线性映射和“球面点→鱼眼图像点”的非线性映射,为后续反向校正提供理论基础。
关键参数计算
r_m:鱼眼图像中心到角落的距离(最大半径,即图像对角线一半),反映鱼眼镜头的视场范围。 theta_m:鱼眼镜头的最大视场角(程序中设为6.35°,可根据镜头参数调整),单位转换为弧度。
h:虚拟针孔相机到成像平面的距离(基于针孔模型,h = r_m / tan(theta_m)),用于后续透视投影计算。
Xc, Yc:鱼眼图像的中心坐标,作为畸变校正的原点。
像素坐标映射
对输出图像In的每个像素(i,j),计算其在原始鱼眼图像中对应的畸变像素位置,具体过程:
1.计算当前像素到中心的距离:
r = sqrt( (i-Xc)² + (j-Yc)² )
表示输出图像中像素(i,j)到中心的径向距离。
2.计算对应视场角theta
theta = atan(r/h)
即该像素在正常透视下对应的空间角度(无畸变时的视角)。
3.计算畸变率D
鱼眼图像的畸变表现为实际成像角度与理想透视角度的偏差。
D = (theta-a)/a
计算畸变率,其中a = tan(theta)(理想透视下的径向距离系数)。
即原始鱼眼图像中像素的径向偏移比例。
4.反向映射原始鱼眼图像坐标
根据畸变率D,计算输出像素(i,j)在原始鱼眼图像中对应的坐标:
x = (1 + D) * (i - Xc) + Xc,y = (1 + D) * (j - Yc) + Yc
将无畸变坐标反向映射到畸变坐标
5.插值处理
由于映射后的坐标可能为非整数,程序采用邻近像素平均法,取映射坐标周围4个整数坐标的像素值平均,赋值给输出像素In(i,j,:),避免出现空洞或锯齿。
6.参考文献
[1]王向军,白皓月,吴凡璐,等.基于改进球面透视投影的鱼眼图像畸变校正方法[J].图学学报, 2018, 39(1):7.DOI:CNKI:SUN:GCTX.0.2018-01-006.
7.算法完整程序工程
OOOOO
OOO
O
关注后输入自动回复码:0011