仿生机器人的SLAM导航
REF:多传感器融合的并联腿式六足步行机器人SLAM建图与路径规划研究
1. 并联足式机器人
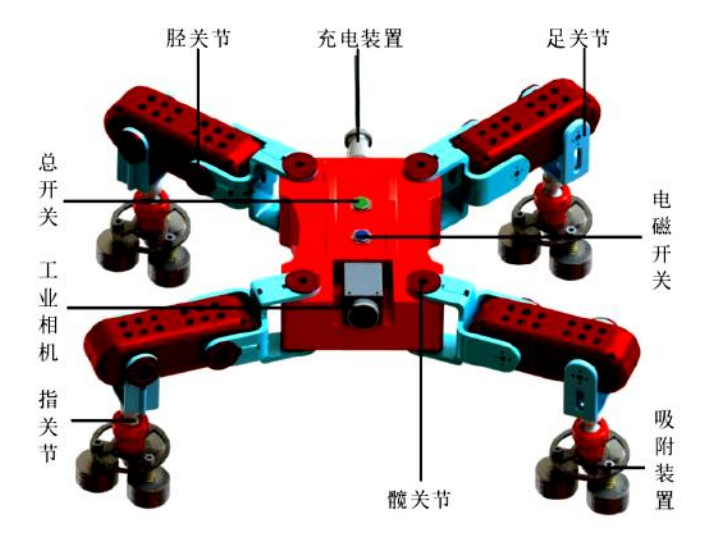
四足磁吸式爬壁机器人:燕山大学研制,用于船舶表面的攀爬
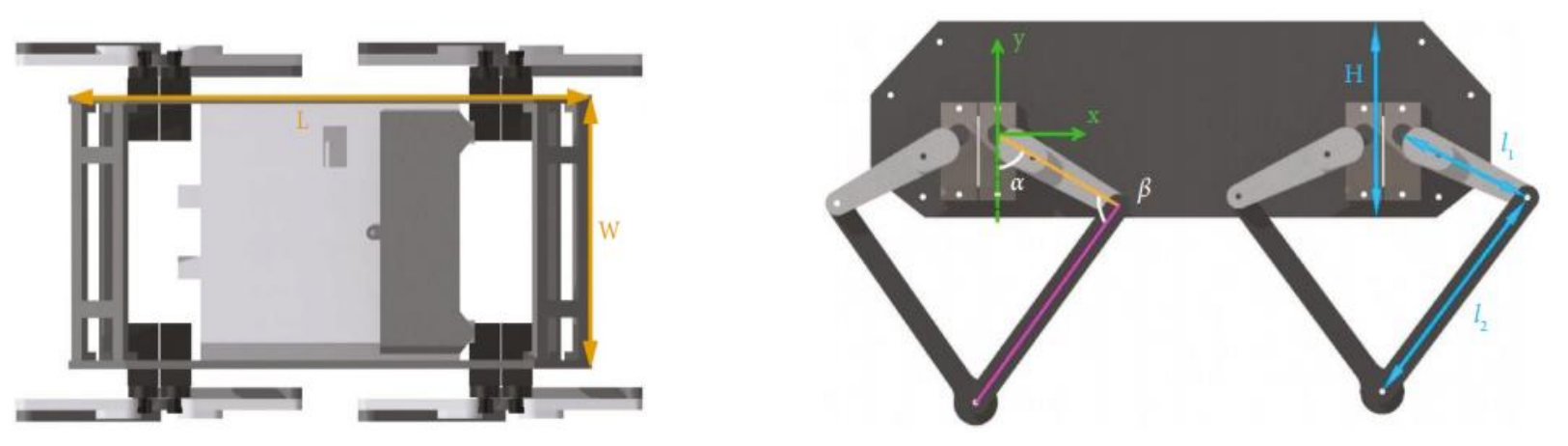
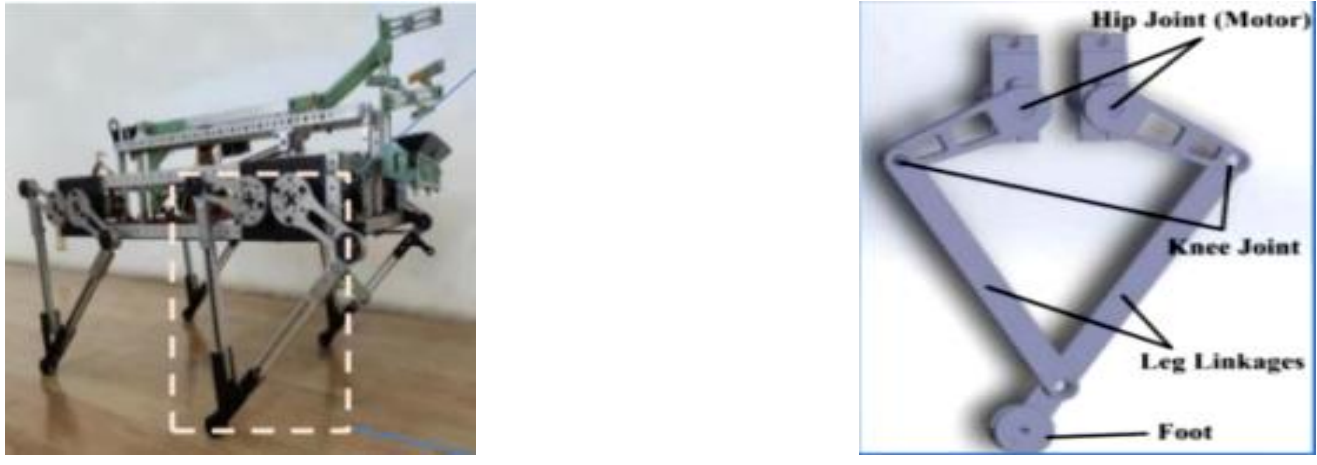
四足并联腿式机器人:采用驱动端水平布置的腿部设计,使得在支撑和摆动阶段减少了脚端和地面之间的冲击
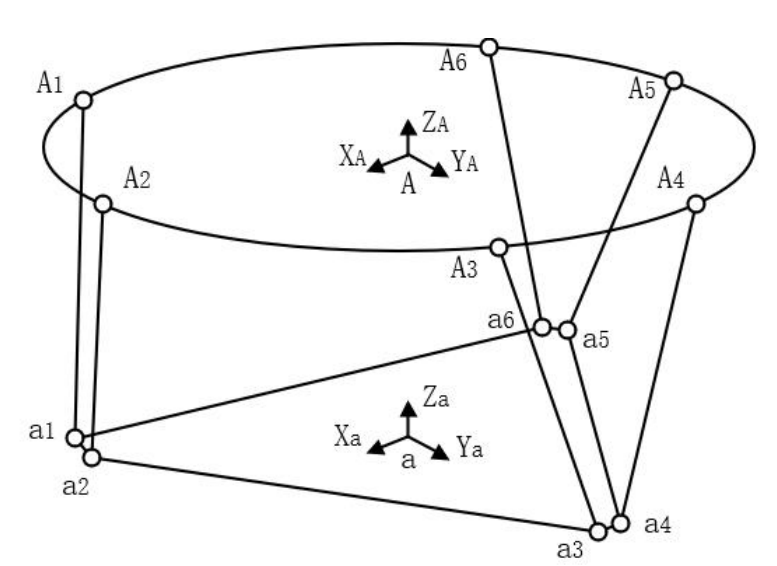
并联步行六足章鱼:上海交通大学高峰团队研制,机器人采用2UPS+UP 的并联机构设计,当腿部完全展开时尺寸
可达 1.5×1.5 米,对称的机身能够向任意方向移动,行进速度最高可达
每分钟 20 米,还可负重 200 公斤
并联腿式机器人:基于新型机械结构,算法基于贝塞尔曲线改进摆动和支撑阶段的足部轨迹,实现了无冲击的运动
并联腿式六足步行机器人:长春工业大学研制,能在复杂地面上自由移动,能成功完成爬楼梯等

2. SLAM建图
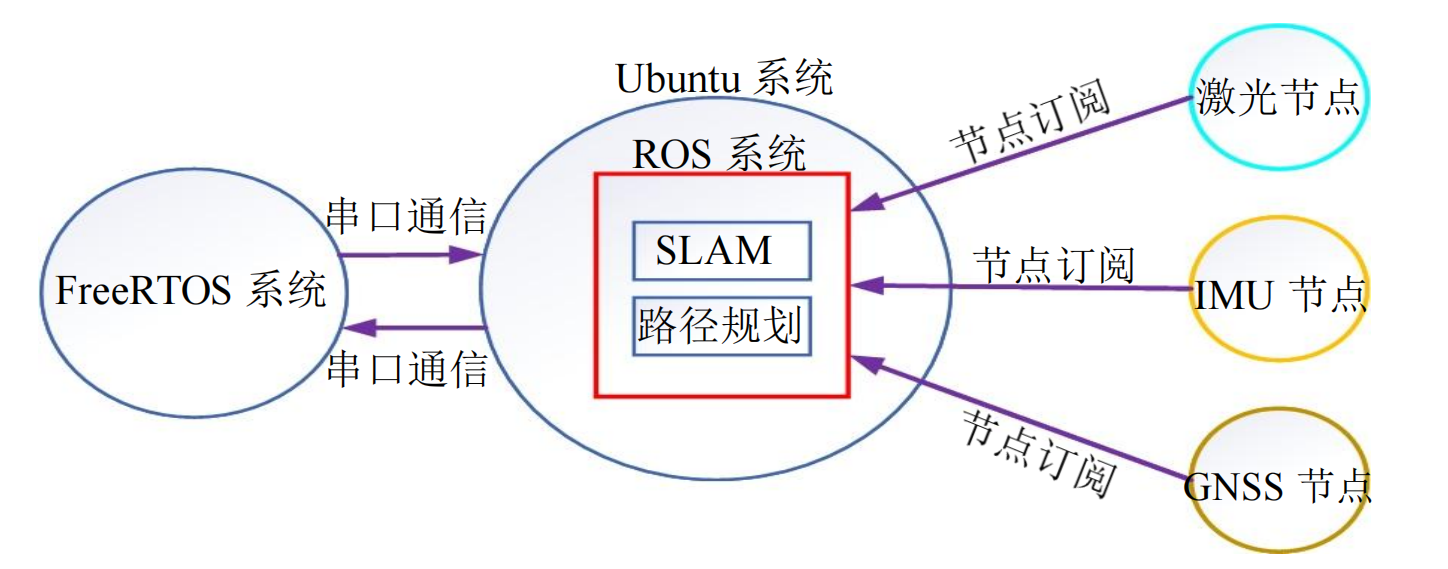
仿生步行机器人无法使用传统的轮式里程计,基于扩展卡尔曼滤波算法,采用 IMU 与 GNSS传感器融合的方式实现机器人的定位与建图
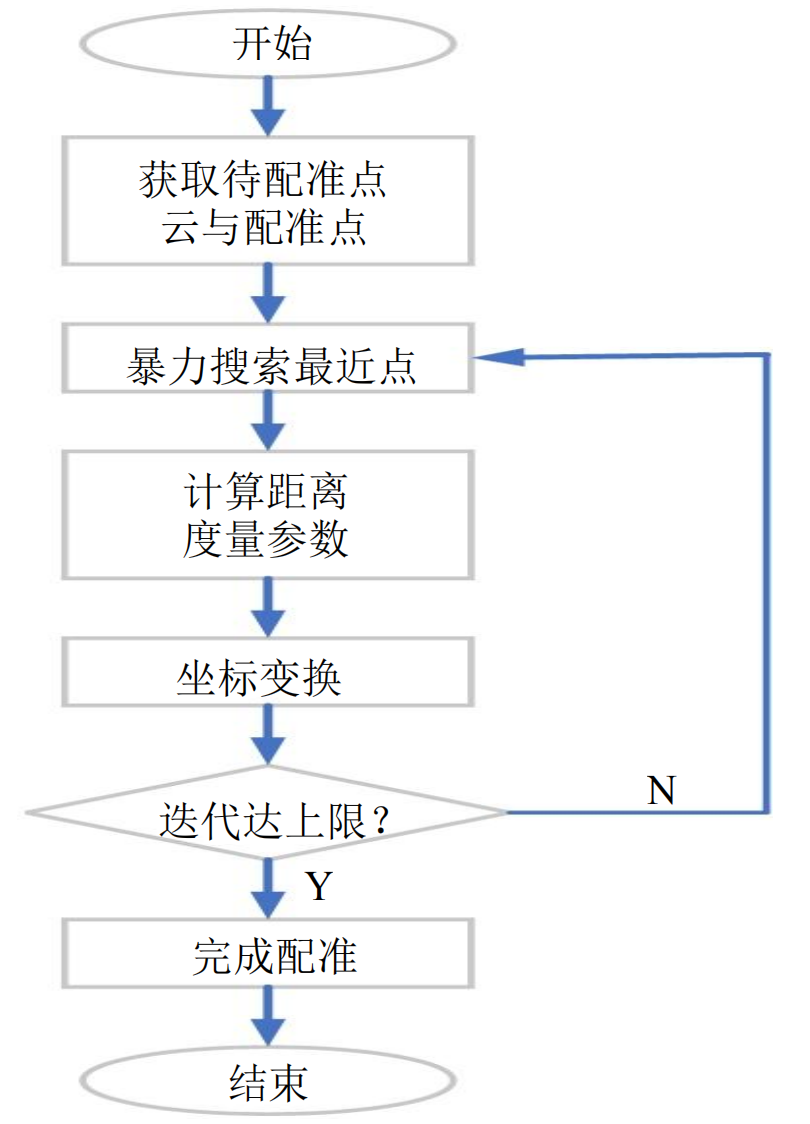
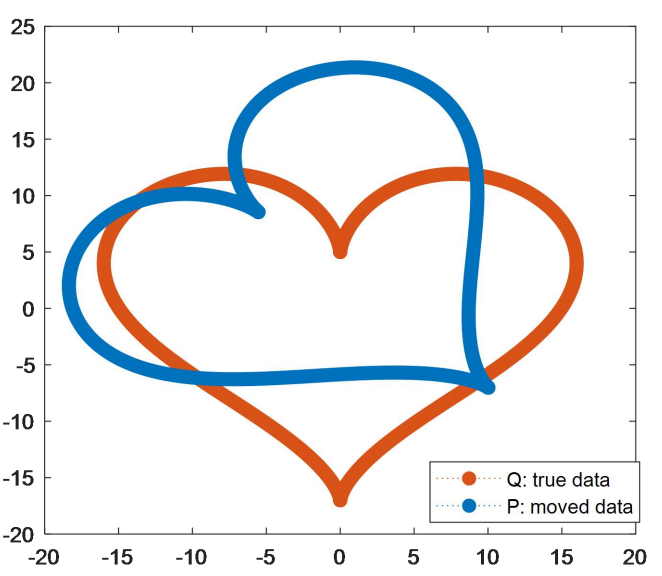
ICP 点云配准算法:找到两个点云之间的最佳刚性变换,使它们尽可能地重合,算法将采集到的点云数据与已知的模型或其他点云进行匹配,以实现精确的配准。

设定某个位姿作为算法的初始状态,直接计算每个点到所有点的距离,找到最小距离点
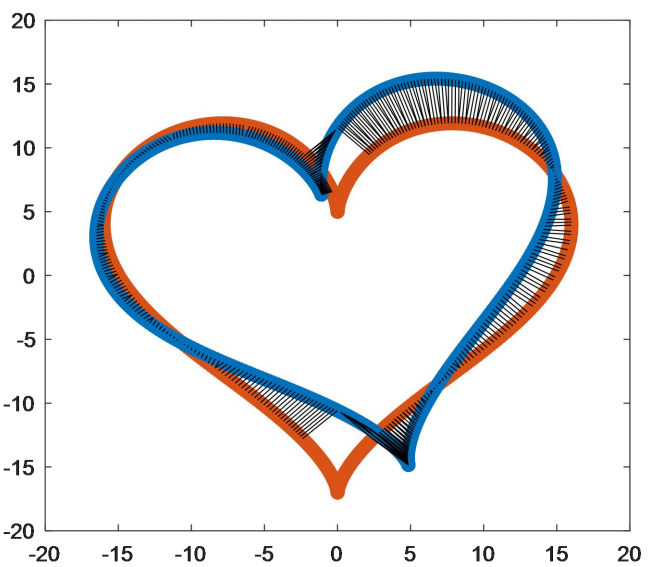
根据初始点得到对应点,通过距离阈值参数过滤掉不合理的匹配点对。
计算点云转换,得到最优变换
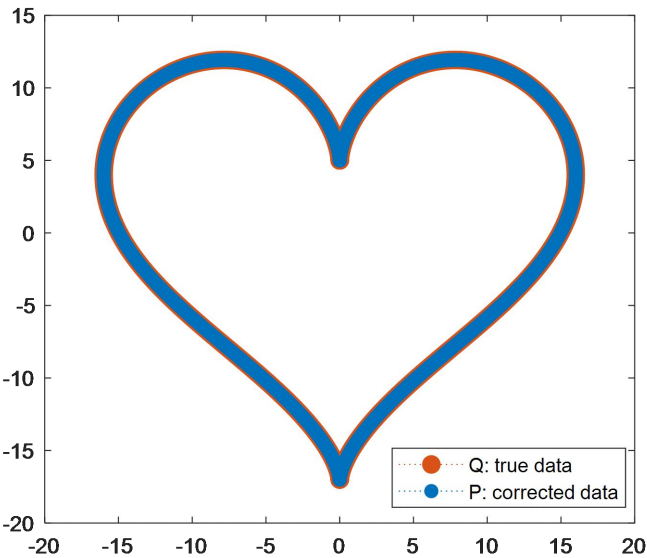
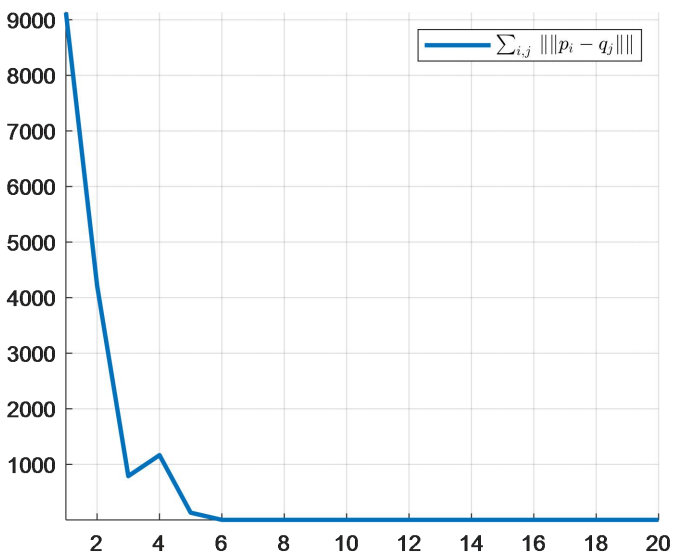
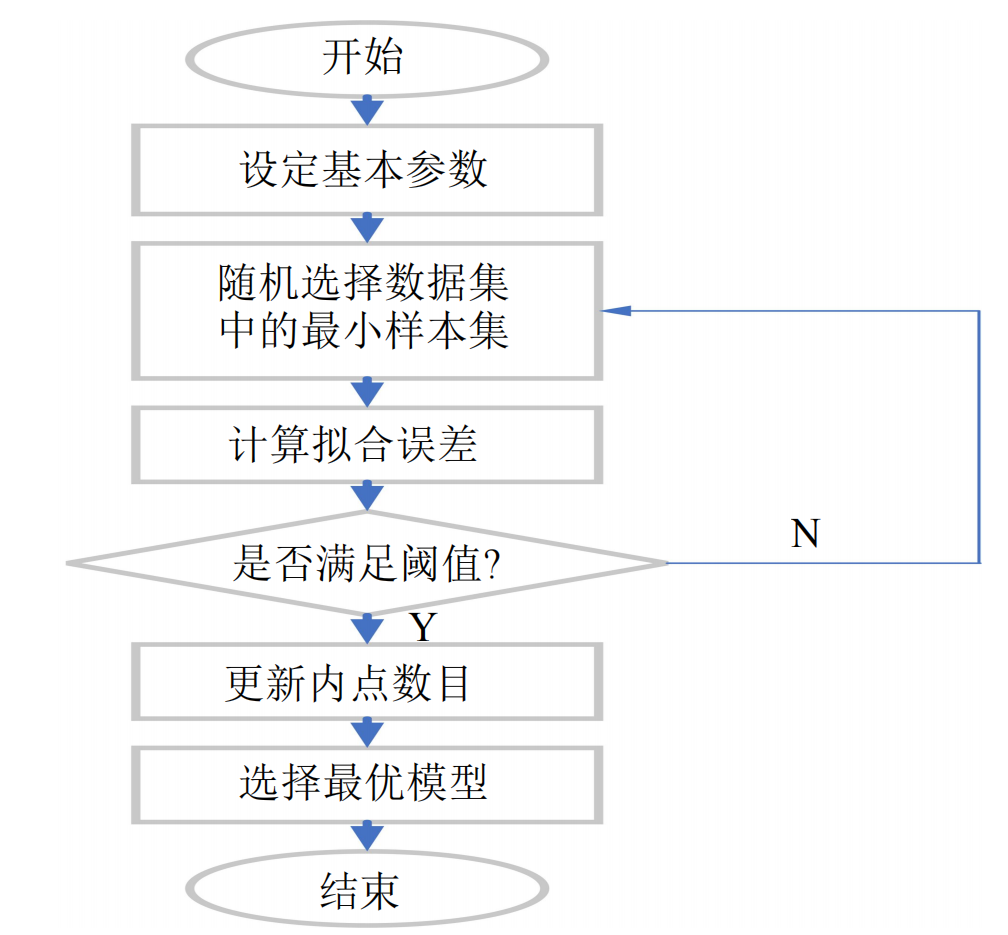
算法迭代:直到相邻两次迭代的损失函数差小于系统设定的阈值,或者迭代次数达到最大迭代上限,此时程序将停止
ICP点云流程图:
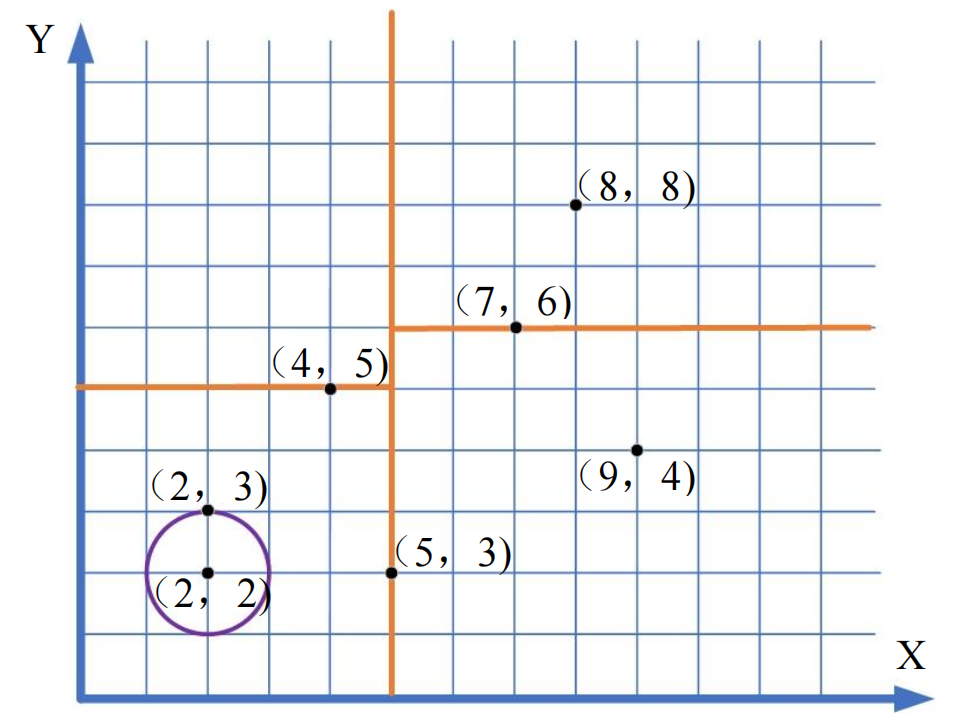
ICP点云配准迭代示例
KDTree数据结构:可以将激光点云数据进行高效的空间划分,将点云的坐标信息以一种层次结构的方式存储,在查找最近邻点时避免对每个点进行全局遍历,通过在特定的子空间中进行搜索,显著减少了搜索最近邻点所需的时间,在点云配准中应用能够提高匹配速度,并在高维空间中实现更快速、更有效的最近邻点搜索
RANSAC 算法:通过随机选择数据集中的子集来拟合模型,并通过统计学方法来找到最佳模型参数,在处理带有大量噪声和离群点的数据集时表现出极强的鲁棒性,能够迅速估计出一个粗略的模型参数
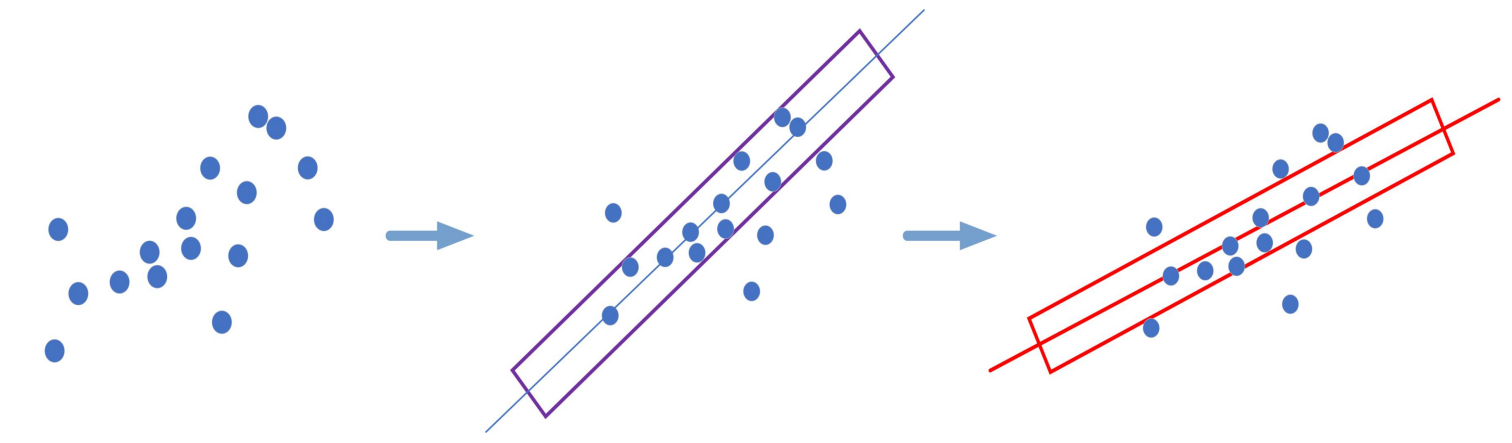
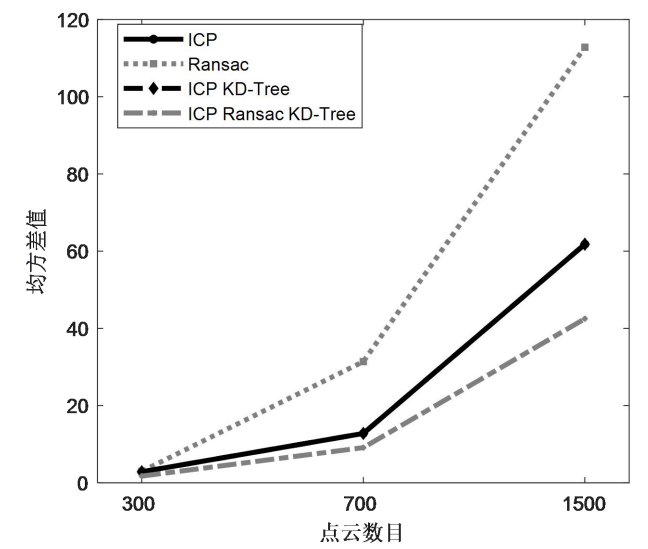
结合ICP和RANSAC 算法:先使用RANSAC 算法快速的粗略估计,有效地剔除异常值,为 ICP 算法提供一个较好的起始点;然后应用 ICP 算法进行精细调整,利用其高精度的特性对配准结果进行优化。
多传感器时间对齐:时间同步可以减小由于传感器间时间差异引起的误差,从而提高 SLAM 系统的整体表现
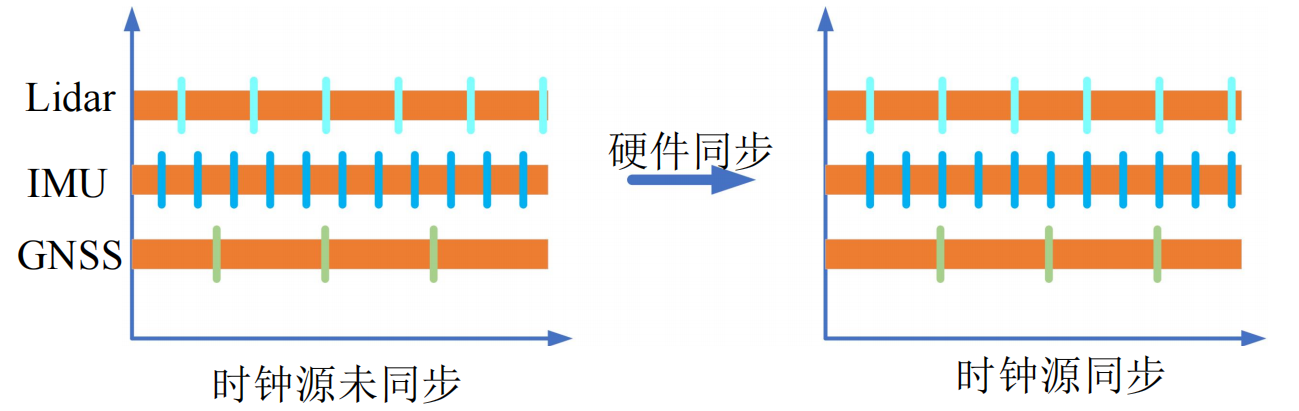
融合IMU、GNSS:使用扩展卡尔曼滤波(EKF)融合 IMU 数据和 GNSS 数据,IMU 更新频繁,提供高频状态估计,但会产生累计误差,GNSS 有自我校正功能,提供准确的全局位置信息,从而纠正 IMU 的累积误差,扩展卡尔曼滤波通过预测和更新两步实现对数据融合。
预测阶段:状态预测和协方差预测,对于 IMU 来说,状态包括位置、速度、姿态等,而协方差则表示状态估计的不确定性
更新阶段:通过融合 GNSS 模块的数据,更新系统的状态估计和协方差矩阵
卡尔曼增益 K: 作用是根据预测的状态估计和观测模型的不确定性,调整预测值,使其更加接近实际测量值;增益值取决于状态估计的不确定性和观测噪声的相对大小。如果观测噪声较小或者预测的状态估计不确定性较大,增益会较大,更倾向于相信测量值
3. 路径规划
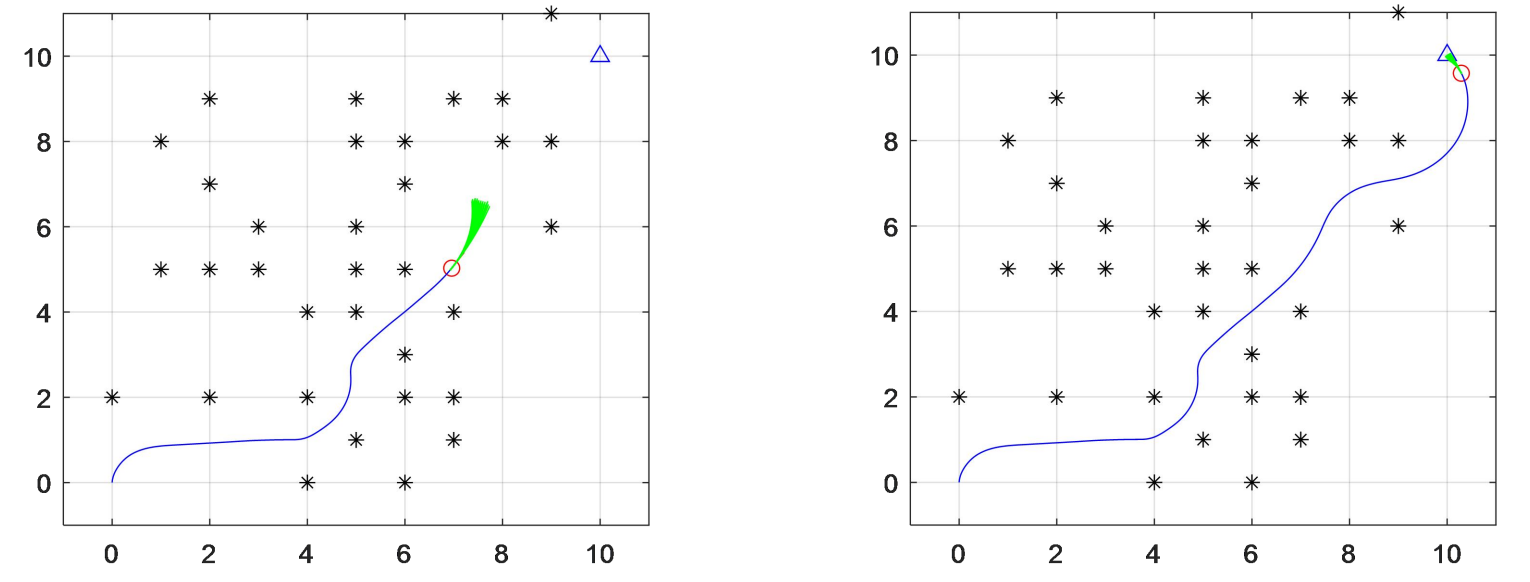
基于障碍物数量优化Astar启发函数:
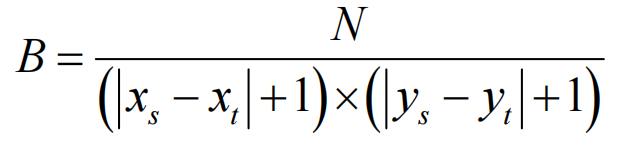
其中:xs 、 ys:表示起始点的 x 和 y 轴坐标
xt 、 yt:表示目标点的 x 和 y 轴坐标
N:表示起止点构成的矩形区域内障碍物的总数

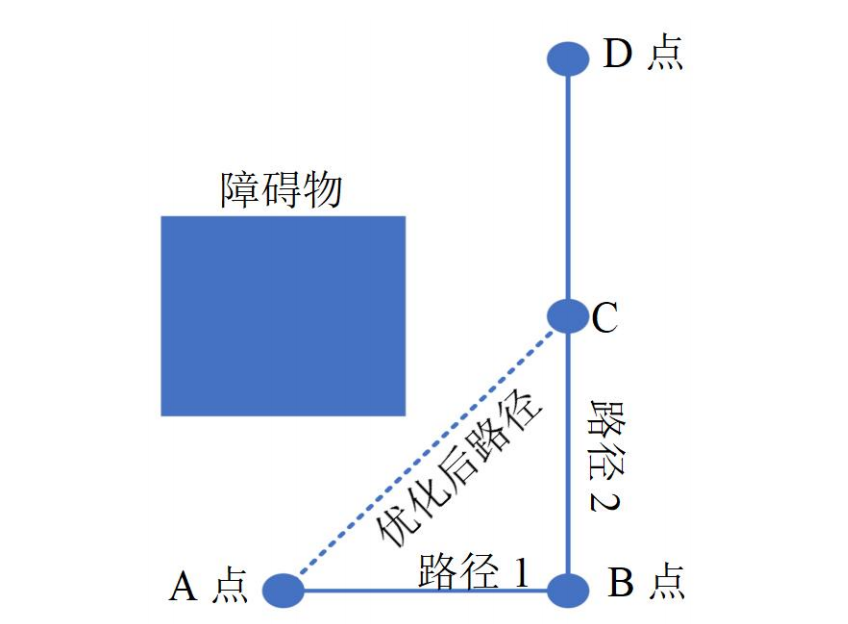
全局搜索范围改进:跳过无法通过的节点,减少搜索的耗时和复杂度,提高搜索算法的效率
规划路径平滑改进:采用直线段微分节点,过多的拐点会导致运动的不连续,使得行驶路线出现频繁的停顿和转向,影响行驶的流畅性和速度
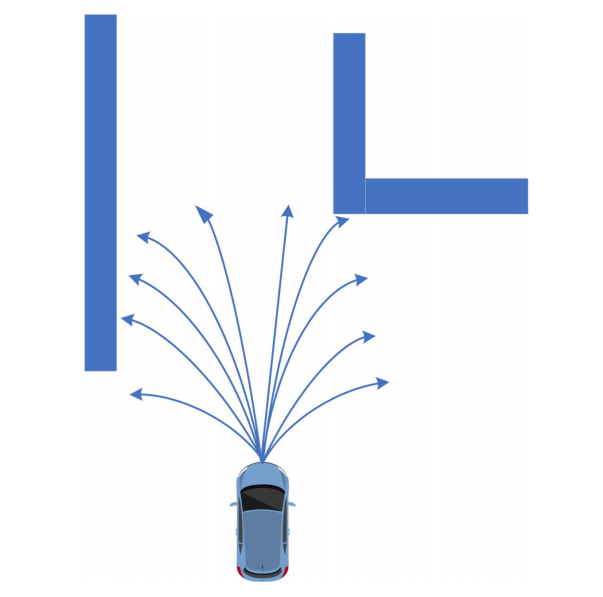
融合局部路径规划DWA算法:DWA算法基于机器人在给定时间段内可以选择的速度范围,将速度和角速度的不同组合称为窗口,评估每个窗口的安全性和效果,从中选择最优的窗口来指导机器人运动