线性代数 - 二阶矩阵的行列式、向量叉积(Cross product)的模长与平行四边形面积的关系
线性代数 - 二阶矩阵的行列式、向量叉积(Cross product)的模长与平行四边形面积的关系
flyfish
先说结论
对于平面R2\mathbb{R}^2R2中的两个向量u=(ab)\mathbf{u} = \begin{pmatrix} a \\ b \end{pmatrix}u=(ab)和v=(cd)\mathbf{v} = \begin{pmatrix} c \\ d \end{pmatrix}v=(cd):
它们张成的平行四边形面积为∣底×高∣=∥u∥∥v∥∣sinθ∣|\text{底} \times \text{高}| = \|\mathbf{u}\| \|\mathbf{v}\| |\sin\theta|∣底×高∣=∥u∥∥v∥∣sinθ∣(θ\thetaθ是u\mathbf{u}u与v\mathbf{v}v的夹角)。
这两个向量构成的二阶矩阵(acbd)\begin{pmatrix} a & c \\ b & d \end{pmatrix}(abcd)的行列式为det=ad−bc\det = ad - bcdet=ad−bc,其绝对值∣ad−bc∣|ad - bc|∣ad−bc∣恰好等于平行四边形的面积。
开始
“Cross product” 文是叉积(也称为向量积或叉乘)。
R2\mathbb{R}^2R2 表示二维实数空间,即平面直角坐标系中的所有点,每个点由两个实数组成的有序对(x,y)(x, y)(x,y)表示。
R3\mathbb{R}^3R3 表示三维实数空间,即立体空间中的所有点,每个点由三个实数组成的有序组(x,y,z)(x, y, z)(x,y,z)表示
空心的R\mathbb{R}R是实数集的符号,表示包含所有有理数和无理数的集合。
Rn\mathbb{R}^nRn 就是“nnn维实数空间”,其中每个元素是nnn个实数构成的有序组,R\mathbb{R}R作为基础,定义了空间中坐标的取值范围(全体实数)。
若u\mathbf{u}u和v\mathbf{v}v是R3\mathbb{R}^3R3中的向量,则∥u×v∥\|\mathbf{u} \times \mathbf{v}\|∥u×v∥等于由u\mathbf{u}u和v\mathbf{v}v张成的平行四边形的面积。
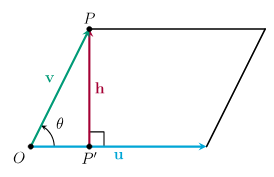
由两个向量张成的平行四边形
平行四边形的面积等于“底边长×高”。
平行四边形的底边长为∥u∥\|\mathbf{u}\|∥u∥,高为∥h∥\|\mathbf{h}\|∥h∥。
观察直角三角形OPP′OPP'OPP′,得∥h∥=∥v∥sinθ\|\mathbf{h}\| = \|\mathbf{v}\| \sin\theta∥h∥=∥v∥sinθ。
因此,平行四边形的面积为∥u∥∥v∥sinθ\|\mathbf{u}\| \|\mathbf{v}\| \sin\theta∥u∥∥v∥sinθ(因θ∈(0,π)\theta \in (0, \pi)θ∈(0,π),可省略绝对值),
即等于∥u×v∥\|\mathbf{u} \times \mathbf{v}\|∥u×v∥。
若u\mathbf{u}u和v\mathbf{v}v是R3\mathbb{R}^3R3中的向量,则
∥u×v∥=∥u∥∥v∥∣sin(θ)∣,\|\mathbf{u} \times \mathbf{v}\| = \|\mathbf{u}\| \|\mathbf{v}\| |\sin(\theta)|,∥u×v∥=∥u∥∥v∥∣sin(θ)∣,
其中θ\thetaθ是u\mathbf{u}u和v\mathbf{v}v之间的夹角。
原因
设u\mathbf{u}u和v\mathbf{v}v是R3\mathbb{R}^3R3中的向量,其中
u=(a1a2a3)且v=(b1b2b3).\mathbf{u} = \begin{pmatrix} a_1 \\ a_2 \\ a_3 \end{pmatrix} \quad \text{且} \quad \mathbf{v} = \begin{pmatrix} b_1 \\ b_2 \\ b_3 \end{pmatrix}.u=a1a2a3且v=b1b2b3.
为避免处理平方根,先计算∥u×v∥2\|\mathbf{u} \times \mathbf{v}\|^2∥u×v∥2:
∥u×v∥2=(a2b3−a3b2)2+(a3b1−a1b3)2+(a1b2−a2b1)2=(a22b32−2a2b3a3b2+a32b22)+(a32b12−2a3b1a1b3+a12b32)+(a12b22−2a1b2a2b1+a22b12)=(a12+a22+a32)(b12+b22+b32)−(a1b1+a2b2+a3b3)2=∥u∥2∥v∥2−(u⋅v)2=∥u∥2∥v∥2−(∥u∥∥v∥cos(θ))2=∥u∥2∥v∥2(1−cos2θ)=∥u∥2∥v∥2sin2θ.\begin{align*}
\|\mathbf{u} \times \mathbf{v}\|^2 &= (a_2b_3 - a_3b_2)^2 + (a_3b_1 - a_1b_3)^2 + (a_1b_2 - a_2b_1)^2 \\
&= (a_2^2b_3^2 - 2a_2b_3a_3b_2 + a_3^2b_2^2) + (a_3^2b_1^2 - 2a_3b_1a_1b_3 + a_1^2b_3^2) + (a_1^2b_2^2 - 2a_1b_2a_2b_1 + a_2^2b_1^2) \\
&= (a_1^2 + a_2^2 + a_3^2)(b_1^2 + b_2^2 + b_3^2) - (a_1b_1 + a_2b_2 + a_3b_3)^2 \\
&= \|\mathbf{u}\|^2 \|\mathbf{v}\|^2 - (\mathbf{u} \cdot \mathbf{v})^2 \\
&= \|\mathbf{u}\|^2 \|\mathbf{v}\|^2 - (\|\mathbf{u}\| \|\mathbf{v}\| \cos(\theta))^2 \\
&= \|\mathbf{u}\|^2 \|\mathbf{v}\|^2 (1 - \cos^2\theta) \\
&= \|\mathbf{u}\|^2 \|\mathbf{v}\|^2 \sin^2\theta.
\end{align*}∥u×v∥2=(a2b3−a3b2)2+(a3b1−a1b3)2+(a1b2−a2b1)2=(a22b32−2a2b3a3b2+a32b22)+(a32b12−2a3b1a1b3+a12b32)+(a12b22−2a1b2a2b1+a22b12)=(a12+a22+a32)(b12+b22+b32)−(a1b1+a2b2+a3b3)2=∥u∥2∥v∥2−(u⋅v)2=∥u∥2∥v∥2−(∥u∥∥v∥cos(θ))2=∥u∥2∥v∥2(1−cos2θ)=∥u∥2∥v∥2sin2θ.
对等式两边取平方根,得
∥u×v∥=∥u∥∥v∥∣sin(θ)∣,\|\mathbf{u} \times \mathbf{v}\| = \|\mathbf{u}\| \|\mathbf{v}\| |\sin(\theta)|,∥u×v∥=∥u∥∥v∥∣sin(θ)∣,
因为sin2θ=∣sinθ∣\sqrt{\sin^2\theta} = |\sin\theta|sin2θ=∣sinθ∣。
两个向量叉积u\mathbf{u}u和v\mathbf{v}v的模长恰好等于u\mathbf{u}u和v\mathbf{v}v张成的平行四边形的面积
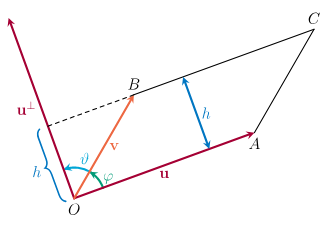
由向量u=(ab)\mathbf{u} = \begin{pmatrix} a \\ b \end{pmatrix}u=(ab)和v=(cd)\mathbf{v} = \begin{pmatrix} c \\ d \end{pmatrix}v=(cd)张成的平行四边形OACBOACBOACB的面积由∣ad−bc∣|ad - bc|∣ad−bc∣给出,即ad−bcad - bcad−bc的绝对值。
ad−bc=∥u∥∥v∥sin(φ)ad - bc = \|\mathbf{u}\| \|\mathbf{v}\| \sin(\varphi)ad−bc=∥u∥∥v∥sin(φ),其中φ\varphiφ是从u\mathbf{u}u逆时针到v\mathbf{v}v的角,我们称这个角为从u\mathbf{u}u到v\mathbf{v}v的有向角。
两个向量构成的二阶矩阵(acbd)\begin{pmatrix} a & c \\ b & d \end{pmatrix}(abcd)的行列式为det=ad−bc\det = ad - bcdet=ad−bc,其绝对值∣ad−bc∣|ad - bc|∣ad−bc∣恰好等于平行四边形的面积
我们同样可以借助叉积的性质,但实际上无需提升到三维空间。通过一个小技巧,可将行列式转化为内积:
ad−bc=(a−b)⋅(cd)=u⊥⋅v,ad - bc = \begin{pmatrix} a \\ -b \end{pmatrix} \cdot \begin{pmatrix} c \\ d \end{pmatrix} = \mathbf{u}^\perp \cdot \mathbf{v},ad−bc=(a−b)⋅(cd)=u⊥⋅v,
其中u⊥\mathbf{u}^\perpu⊥是与u\mathbf{u}u垂直、指向u\mathbf{u}u左侧且长度与u\mathbf{u}u相同的向量。平行四边形OACBOACBOACB和正交向量u⊥\mathbf{u}^\perpu⊥
因此,
ad−bc=u⊥⋅v=∥u⊥∥∥v∥cos(ϑ),ad - bc = \mathbf{u}^\perp \cdot \mathbf{v} = \|\mathbf{u}^\perp\| \|\mathbf{v}\| \cos(\vartheta),ad−bc=u⊥⋅v=∥u⊥∥∥v∥cos(ϑ),
其中ϑ\varthetaϑ是u⊥\mathbf{u}^\perpu⊥和v\mathbf{v}v之间的角。这里h=∥v∥cos(ϑ)h = \|\mathbf{v}\| \cos(\vartheta)h=∥v∥cos(ϑ)(带正负号)是v\mathbf{v}v在u\mathbf{u}u垂线方向上的投影长度,可解释为平行四边形的高。于是:
∥u⊥∥∥v∥cos(ϑ)=∥u∥∥v∥cos(ϑ)=±(底边长)×高=±平行四边形OACB的面积.\begin{align*}
\|\mathbf{u}^\perp\| \|\mathbf{v}\| \cos(\vartheta) &= \|\mathbf{u}\| \|\mathbf{v}\| \cos(\vartheta) \\
&= \pm (\text{底边长}) \times \text{高} \\
&= \pm \text{平行四边形}OACB\text{的面积}.
\end{align*}∥u⊥∥∥v∥cos(ϑ)=∥u∥∥v∥cos(ϑ)=±(底边长)×高=±平行四边形OACB的面积.
经整理可得:
ad−bc=∥u⊥∥∥v∥cos(ϑ)=∥u∥∥v∥cos(π2−φ)=∥u∥∥v∥sin(φ),\begin{align*}
ad - bc &= \|\mathbf{u}^\perp\| \|\mathbf{v}\| \cos(\vartheta) \\
&= \|\mathbf{u}\| \|\mathbf{v}\| \cos\left(\frac{\pi}{2} - \varphi\right) \\
&= \|\mathbf{u}\| \|\mathbf{v}\| \sin(\varphi),
\end{align*}ad−bc=∥u⊥∥∥v∥cos(ϑ)=∥u∥∥v∥cos(2π−φ)=∥u∥∥v∥sin(φ),
其中φ\varphiφ是从u\mathbf{u}u逆时针到v\mathbf{v}v的角。
可见,当从u\mathbf{u}u到v\mathbf{v}v的有向角小于π\piπ时,ad−bcad - bcad−bc等于平行四边形的面积;当角在π\piπ到2π2\pi2π之间时,ad−bcad - bcad−bc等于该面积的负值。我们称其为有向面积。
R2\mathbb{R}^2R2中两个向量u=(ab)\mathbf{u} = \begin{pmatrix} a \\ b \end{pmatrix}u=(ab)和v=(cd)\mathbf{v} = \begin{pmatrix} c \\ d \end{pmatrix}v=(cd)的有序对(u,v)(\mathbf{u}, \mathbf{v})(u,v)的行列式定义为
det(u,v)=ad−bc.\det(\mathbf{u}, \mathbf{v}) = ad - bc.det(u,v)=ad−bc.
或者,行列式可视为作用于2×22 \times 22×2矩阵的算子,记法为:
det(u v)=det((acbd))=∣acbd∣=ad−bc.\det(\mathbf{u}\ \mathbf{v}) = \det\left(\begin{pmatrix} a & c \\ b & d \end{pmatrix}\right) = \begin{vmatrix} a & c \\ b & d \end{vmatrix} = ad - bc.det(u v)=det((abcd))=abcd=ad−bc.
除面积外,行列式还能反映u\mathbf{u}u和v\mathbf{v}v的相对位置。实际上,我们可通过行列式定义平面中两个向量的定向(后续也可定义Rn\mathbb{R}^nRn中nnn个向量的定向)。
若两个线性无关向量u\mathbf{u}u和v\mathbf{v}v的有序对(u,v)(\mathbf{u}, \mathbf{v})(u,v)满足det(u,v)>0\det(\mathbf{u}, \mathbf{v}) > 0det(u,v)>0,则称其为正定向;若det(u,v)<0\det(\mathbf{u}, \mathbf{v}) < 0det(u,v)<0,则称其为负定向。
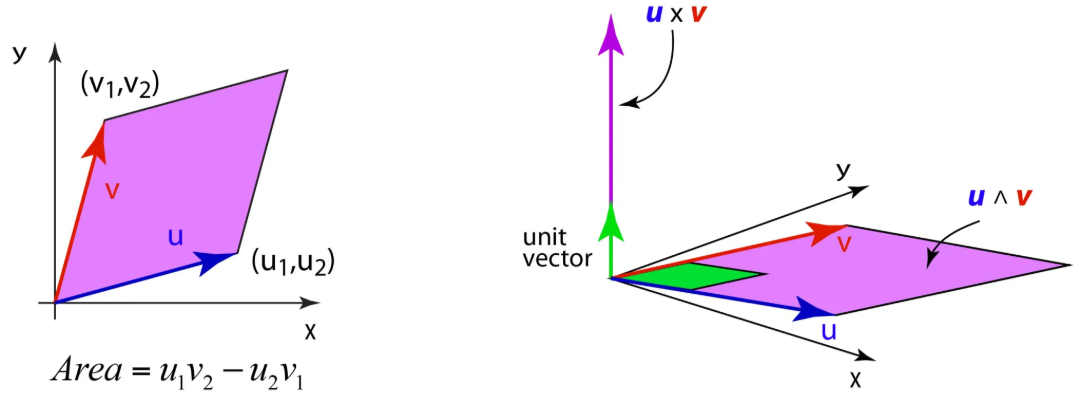
左图:二维空间的平行四边形面积(行列式/有向面积)
在二维实数空间R2\mathbb{R}^2R2中,向量u=(u1,u2)\mathbf{u} = (u_1, u_2)u=(u1,u2)和v=(v1,v2)\mathbf{v} = (v_1, v_2)v=(v1,v2)张成一个平行四边形。
其有向面积(带符号的面积,符号反映向量的“定向”)由公式u1v2−u2v1u_1v_2 - u_2v_1u1v2−u2v1给出,这正是二阶矩阵(u1v1u2v2)\begin{pmatrix} u_1 & v_1 \\ u_2 & v_2 \end{pmatrix}(u1u2v1v2)的行列式。
面积的绝对值就是平行四边形的实际面积
右图:三维空间的叉积与外积
在三维实数空间R3\mathbb{R}^3R3中,向量u\mathbf{u}u和v\mathbf{v}v的运算体现了“空间元素”的不同刻画:
叉积(u×v\mathbf{u} \times \mathbf{v}u×v):是一个向量,方向垂直于u\mathbf{u}u和v\mathbf{v}v所在的平面,模长等于u\mathbf{u}u和v\mathbf{v}v张成的平行四边形的面积。图中紫色箭头的长度反映面积大小,方向体现空间垂直方向的定向。
外积(u∧v\mathbf{u} \wedge \mathbf{v}u∧v):是一个二维平面元素,直接刻画了u\mathbf{u}u和v\mathbf{v}v张成的平行四边形“本身”(包含面积和平面的定向信息)。图中紫色的平行四边形区域就是外积所表示的“平面块”,绿色小平行四边形可理解为单位化的参考。
上面提到了外积
外积(u∧v\mathbf{u} \wedge \mathbf{v}u∧v”)外积可以作为张量积(tensor product/outer product),外积也可以作为楔积(wedge product/exterior product)
叉积(u×v\mathbf{u} \times \mathbf{v}u×v)仅在三维空间中存在,结果是一个向量(方向垂直于原平面,模长为平行四边形面积)。
外积(u∧v\mathbf{u} \wedge \mathbf{v}u∧v)在任意nnn维空间中都可定义,结果是一个**“2-向量”(或“二维 blade”),它直接表示u\mathbf{u}u和v\mathbf{v}v张成的平行四边形本身**(包含面积、平面的定向,以及子空间的“位置”信息)。
例子
设u\mathbf{u}u和v\mathbf{v}v是R3\mathbb{R}^3R3中的向量,其中
u=(a1a2a3)且v=(b1b2b3).\mathbf{u} = \begin{pmatrix} a_1 \\ a_2 \\ a_3 \end{pmatrix} \quad \text{且} \quad \mathbf{v} = \begin{pmatrix} b_1 \\ b_2 \\ b_3 \end{pmatrix}.u=a1a2a3且v=b1b2b3.
叉积u×v\mathbf{u} \times \mathbf{v}u×v定义为
u×v=(a2b3−a3b2a3b1−a1b3a1b2−a2b1).\mathbf{u} \times \mathbf{v} = \begin{pmatrix} a_2b_3 - a_3b_2 \\ a_3b_1 - a_1b_3 \\ a_1b_2 - a_2b_1 \end{pmatrix}.u×v=a2b3−a3b2a3b1−a1b3a1b2−a2b1.
我们来计算下列向量u\mathbf{u}u和v\mathbf{v}v的叉积。
u=(214)且v=(365).\mathbf{u} = \begin{pmatrix} 2 \\ 1 \\ 4 \end{pmatrix} \quad \text{且} \quad \mathbf{v} = \begin{pmatrix} 3 \\ 6 \\ 5 \end{pmatrix}.u=214且v=365.
根据定义,u×v\mathbf{u} \times \mathbf{v}u×v等于
(1⋅5−4⋅64⋅3−2⋅52⋅6−1⋅3)=(−1929).\begin{pmatrix} 1 \cdot 5 - 4 \cdot 6 \\ 4 \cdot 3 - 2 \cdot 5 \\ 2 \cdot 6 - 1 \cdot 3 \end{pmatrix} = \begin{pmatrix} -19 \\ 2 \\ 9 \end{pmatrix}.1⋅5−4⋅64⋅3−2⋅52⋅6−1⋅3=−1929.
你可能会注意到一个特别之处:向量u×v\mathbf{u} \times \mathbf{v}u×v与u\mathbf{u}u和v\mathbf{v}v都正交。事实上,u×v\mathbf{u} \times \mathbf{v}u×v和u\mathbf{u}u的点积为(−19)⋅2+2⋅1+9⋅4=−38+2+36=0(-19) \cdot 2 + 2 \cdot 1 + 9 \cdot 4 = -38 + 2 + 36 = 0(−19)⋅2+2⋅1+9⋅4=−38+2+36=0,u×v\mathbf{u} \times \mathbf{v}u×v和v\mathbf{v}v的点积为(−19)⋅3+2⋅6+9⋅5=−57+12+45=0(-19) \cdot 3 + 2 \cdot 6 + 9 \cdot 5 = -57 + 12 + 45 = 0(−19)⋅3+2⋅6+9⋅5=−57+12+45=0。
若u\mathbf{u}u和v\mathbf{v}v是R3\mathbb{R}^3R3中的向量,则u×v\mathbf{u} \times \mathbf{v}u×v与u\mathbf{u}u和v\mathbf{v}v都正交。
证明
设u\mathbf{u}u和v\mathbf{v}v是R3\mathbb{R}^3R3中的向量,其中
u=(a1a2a3)且v=(b1b2b3).\mathbf{u} = \begin{pmatrix} a_1 \\ a_2 \\ a_3 \end{pmatrix} \quad \text{且} \quad \mathbf{v} = \begin{pmatrix} b_1 \\ b_2 \\ b_3 \end{pmatrix}.u=a1a2a3且v=b1b2b3.
要证明u×v\mathbf{u} \times \mathbf{v}u×v和u\mathbf{u}u正交,需证明它们的点积为零。计算点积:
(u×v)⋅u=(a2b3−a3b2)⋅a1+(a3b1−a1b3)⋅a2+(a1b2−a2b1)⋅a3=a2b3a1−a3b2a1+a3b1a2−a1b3a2+a1b2a3−a2b1a3=0.\begin{align*}
(\mathbf{u} \times \mathbf{v}) \cdot \mathbf{u} &= (a_2b_3 - a_3b_2) \cdot a_1 + (a_3b_1 - a_1b_3) \cdot a_2 + (a_1b_2 - a_2b_1) \cdot a_3 \\
&= a_2b_3a_1 - a_3b_2a_1 + a_3b_1a_2 - a_1b_3a_2 + a_1b_2a_3 - a_2b_1a_3 \\
&= 0.
\end{align*}(u×v)⋅u=(a2b3−a3b2)⋅a1+(a3b1−a1b3)⋅a2+(a1b2−a2b1)⋅a3=a2b3a1−a3b2a1+a3b1a2−a1b3a2+a1b2a3−a2b1a3=0.
类似地,可证明u×v\mathbf{u} \times \mathbf{v}u×v和v\mathbf{v}v的点积也为零。