SLAM中的非线性优-3D图优化之轴角在Opencv-PNP中的应用(二)
本节是上节内容的延续,主要展示如何利用轴角来跟四元数来求解旋转部分的雅可比跟残差,其他不变的地方不重复列出来了,接下来请看精彩内容
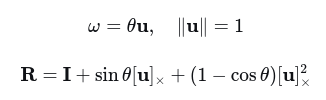
一. 罗德里格斯参数化

二. 计算各个偏导数
(1) 由于 θ = |w| = √(w_x² + w_y² + w_z²)
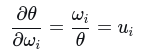
(2)∂uj / ∂wj

其中δij是克罗内克δ函数
(3)
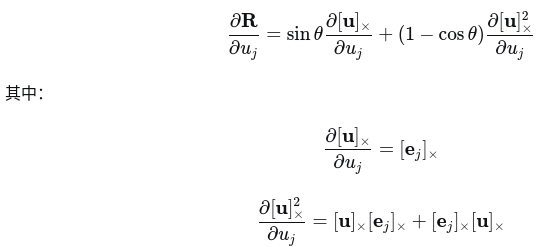
最终通过整合得出结果


代码中的 dx0dr, dy0dr, dz0dr
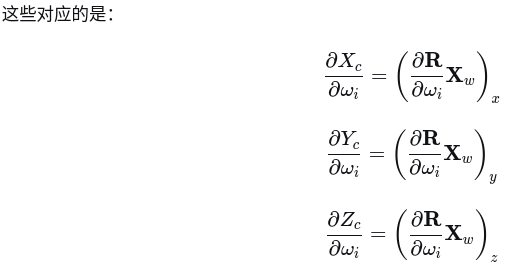
(4) 归一化坐标导数
double dxdr = z * (dx0dr[j] - x * dz0dr[j]);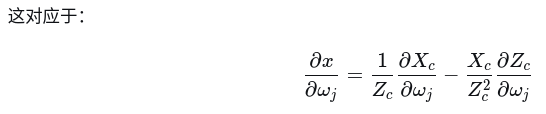
(5) 特殊情况的验证
当theta趋近于0时
如果只绕单一轴旋转,如z轴

这与直接对旋转矩阵求导的结果一致。
三. 四元数参数化
(1) 旋转用单位四元数表示:

(2) 旋转矩阵与四元数的关系:

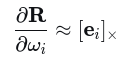
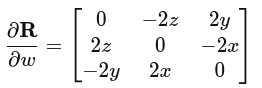
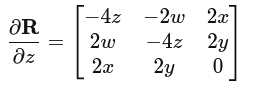
(3) 旋转矩阵对四元数的导数
四元数求导,直接对各个元素求解

(4)四元数关于相机坐标的导数
一般形式如下:
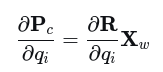
其中qi = {w, x, y, z}
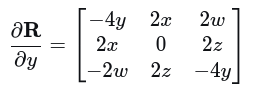
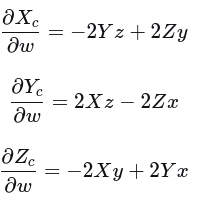
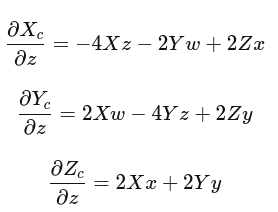
展开对各个分量求导


(5) 归一化坐标对四元数的导数
一般公式
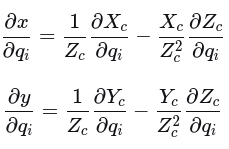
带入即可算出相应雅可比,此处只列出w分量的雅可比,其它的类似

四. 约束处理
由于四元数是单位四元数,需要处理约束 ||q|| = 1的情况,在优化中常用:局部参数化
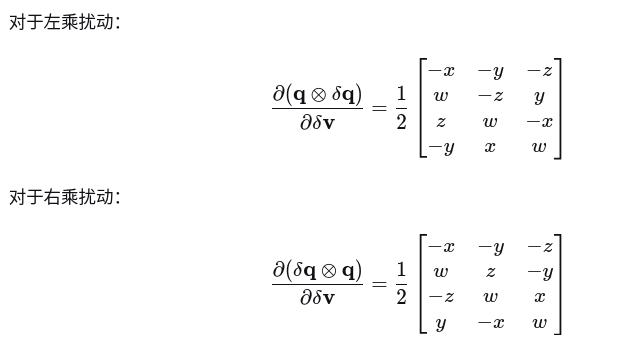
使用3维局部扰动:
对应的雅可比矩阵
实际优化中使用3×2N的雅可比矩阵:
![]()
其中 Jδv→q 表示四元数对局部扰动的雅可比导数矩阵。
(1)问题描述:

在使用四参数无约束优化时可能出现以下问题:
- 迭代过程中四元数可能丢失单位长度特性
- 旋转矩阵的正交性难以保持
- 这些问题会导致数值不稳定性和结果误差
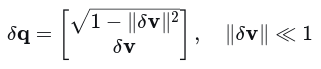
(2)局部参数化方法
在当前估计值附近定义一个三维局部扰动
![]()
其中扰动也是一个单位四元数
最常用的局部参数化:

对于小扰动采用一阶近似:

(3)链式求导:从局部参数到重投影误差,完整的导数链

关键项
完整的雅可比矩阵计算-旋转部分的雅可比
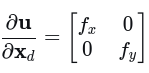
旋转对重投影误差的雅可比为:

其中Je->u

四元数约束处理的关键:
局部参数化:使用3维扰动在切空间中进行无约束优化
链式求导:通过完整的导数链计算重投影误差对局部扰动的雅可比
指数映射:将局部扰动映射回单位四元数
数值稳定:通过归一化保证四元数始终在单位球面上
总结
四元数的核心优势:
- 无奇异性:完全规避万向节锁问题
- 数值稳定性:单位四元数确保旋转矩阵正交性
- 插值特性:支持自然的球面线性插值
与罗德里格斯参数的比较:
参数维度:
- 四元数:4参数(带约束条件)
- 罗德里格斯:3参数(无约束优化)
计算特性:
- 四元数:导数计算更复杂但数值稳定
- 罗德里格斯:计算更简单但存在奇异点
应用场景:
- PnP问题:倾向于使用罗德里格斯参数
- SLAM系统:更常采用四元数表示
四元数求导要点:
- 保持链式法则的一致性
- 需计算旋转矩阵对四元数各分量的偏导
- 需处理单位范数约束条件
- 数值优势体现在大角度旋转场景
实际应用建议: 在PnP等优化问题中,罗德里格斯参数因其简洁的无约束形式更具实用价值,而四元数更适合需要数值稳定性的SLAM系统。