CANOE概念与应用
CANOE概念与背景
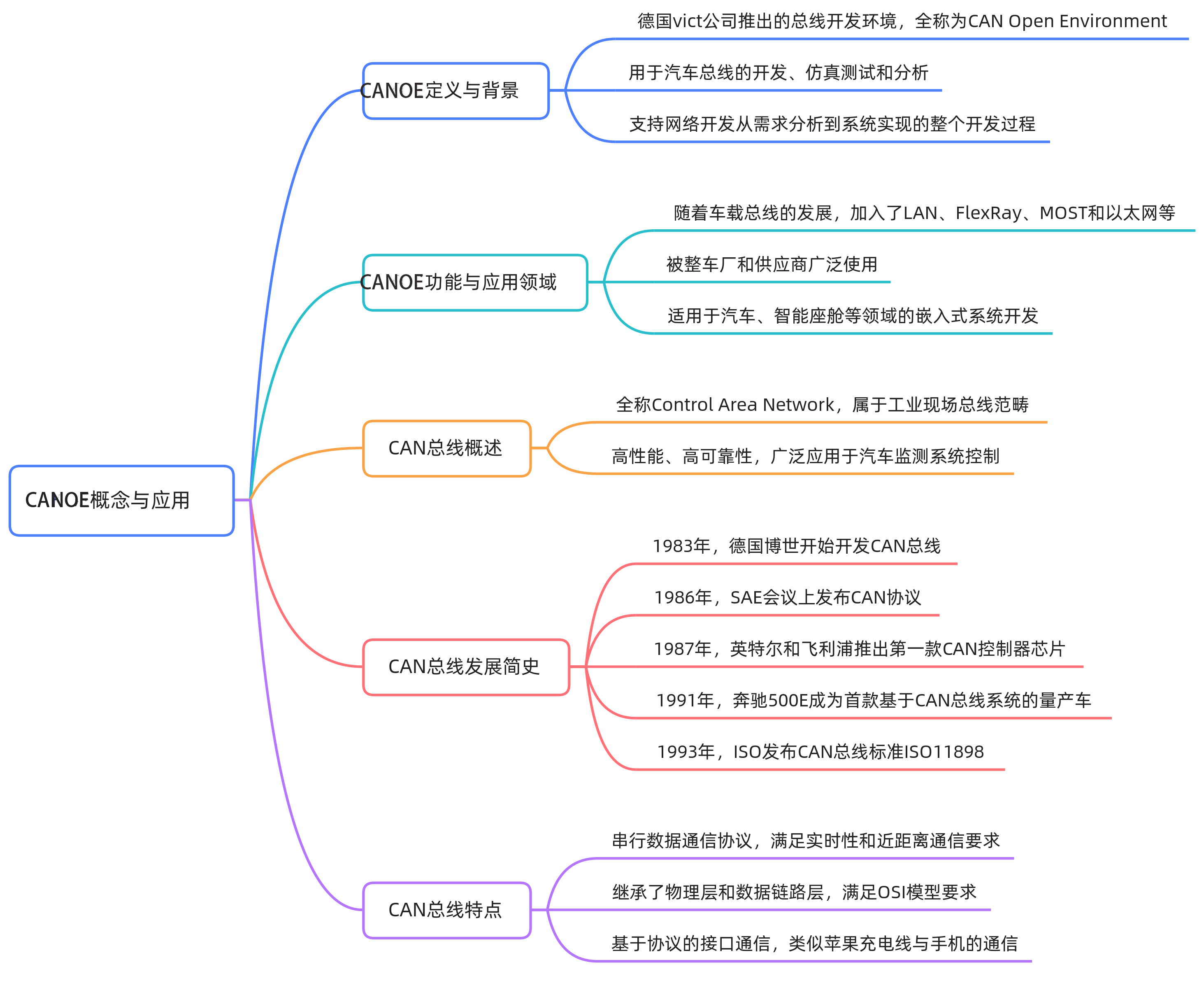
CANOE是德国Vector公司推出的CAN Open Environment,是一个用于汽车总线开发、仿真、测试和分析的集成化开发环境。
最初为满足ECU单元间基于统一通讯协议的功能开发与联调需求而设计。
支持从需求分析到系统实现的完整开发流程,被整车厂和供应商广泛应用于网络设计、开发与测试环节。
Vector公司已成为汽车行业嵌入式系统开发的重要合作伙伴。
智能座舱的开发属于嵌入式系统开发范畴,因此与CANOE密切相关。
CAN与CANOE全称解释
CAN的全称为Control Area Network(控制局域网络),属于工业现场总线。
CANOE全称为CAN Open Environment,即控制局域网络开放环境。
需掌握其英文全称及中文含义,避免混淆。
CAN总线起源与发展简史
CAN总线最初由德国博世公司为汽车监测控制系统设计。
因其高性能、高可靠性与独特设计,迅速被业界借鉴并广泛应用。
1983年:博世开始开发CAN总线。
1986年:在SAE会议上正式发布CAN协议,奠定理论基础。
1987年:英特尔与飞利浦联合推出首款CAN控制器芯片,实现理论向产品转化。
1991年:奔驰S500量产全球首款基于CAN总线系统的汽车。
同年,博世发布CAN 2.0标准,分为A(11位标识符标准帧)和B(29位标识符扩展帧)两个版本。
1993年:ISO正式发布ISO 11898标准,规范数据链路层及高速/低速CAN的物理层协议。
CAN总线的技术特点
CAN总线是一种串行数据通信协议,采用逐位顺序传输方式,每位数据占据固定时间长度,具备高实时性,适用于近距离通信。
继承了CAN协议的物理层与数据链路层,符合OSI七层模型架构。
只要设备遵循CAN协议并具备相应通信接口,即可实现互连互通。
类比苹果手机充电线:只要第三方厂商按照苹果定义的数据通信协议开发接口,即可实现充电与数据传输功能。
CAN总线同理:任何ECU只要基于CAN协议开发并预留通信接口,即可接入总线进行数据交互,无需关心底层实现细节。