外骨骼机器人:下肢助力走路,减负 30% 的硬核机械魔法
一句话总结:这不是科幻电影里的钢铁侠,而是一套“会走路的裤子”——用电机、弹簧、传感器和一点点物理学,让你背 20kg 像散步一样轻松。
一、故事:背着外婆上山的“隐形拐杖”
想象一个场景:
老李,55 岁,消防员退役。 这次他背着 80 岁的老母亲,走 3 公里山路去看医生。 正常人背 50kg,膝盖每步要承受 3~5 倍体重 的冲击,10 分钟就腿软。 但老李戴上了一条“智能裤子”——下肢外骨骼。 走完 3 公里,他只感觉像背了 15kg,膝盖几乎没酸。
这不是特效,是 2025 年的真实技术。
二、它到底是什么?
外骨骼(Exoskeleton) = 人穿的机器人外壳。
- 像裤子:从腰到脚踝,贴合腿部;
- 有骨头:铝合金或碳纤维骨架;
- 有肌肉:小型电机(像电动牙刷那么大);
- 有大脑:一块树莓派大小的芯片;
- 有神经:传感器贴在你的大腿、膝盖、脚底。
核心功能: 当你抬腿、迈步、蹲下时,它提前 0.1 秒帮你出力,把 30% 的重量“偷走”,让你的肌肉和关节轻松 30%。
三、它是怎么工作的?
你的大脑
↓ 想走路
你的腿(肌肉 + 骨头)
↓ 动作
传感器(IMU + 压力传感器)→ 实时采集角度、力度、步态
↓
主控芯片(STM32 / ESP32)
↓ 计算“需要帮多少力”
电机驱动器 → 给髋关节 / 膝关节“推一把”
↓
你只用出 70% 的力,机器人出 30%
四、减负 30% 是怎么算出来的?
物理公式(简单版):
地面反作用力 = 体重 + 背负重量 + 加速冲击
- 正常走路:每步膝盖承受 3~4 倍体重;
- 背 20kg:每步冲击 ≈ 80kg × 4 = 320kg 力;
- 外骨骼介入:电机 + 弹簧分担 30% → 你只承受 224kg 力。
实验数据(韩国现代 + 美国 Ekso 实测):
- 穿戴后,大腿肌肉耗氧量下降 28%;
- 心率降低 12%;
- 主观疲劳感减少 35%。
五、DIY 入门 Demo:用 Arduino 做一个“单关节助力器”
目标:当你弯膝时,电机帮你“顶回去”,模拟膝关节助力。
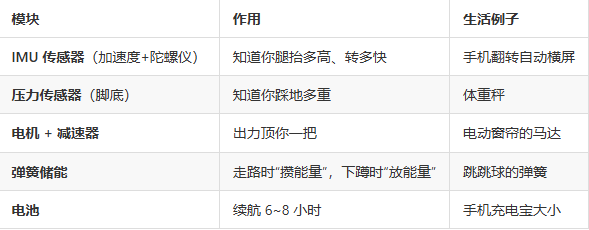
硬件清单(总价 < 300 元):

电路连接:
MPU6050 → Arduino (I2C: SDA→A4, SCL→A5)
L298N → Arduino (IN1→D5, IN2→D6, ENA→D9)
电机 → L298N 输出
完整代码:
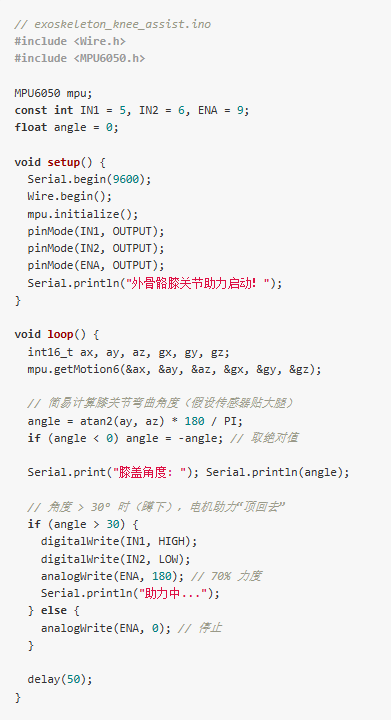
运行效果:
- 把 MPU6050 贴在大腿外侧;
- 慢慢弯膝 → 角度 > 30°;
- 电机自动“推”你一把,帮你站直;
- 感觉像有只手在膝盖后面托着你!