openpnp - 坐标系统只有一个
文章目录
- openpnp - 坐标系统只有一个
- 概述
- 笔记
- 备注
- END
openpnp - 坐标系统只有一个
概述
想测试自动换刀,想确认一下openpnp的坐标系统。
本来想将顶部相机移动到吸嘴库中的吸嘴上部中心,然后用openpnp提供的"将吸嘴移动到相机中心"的功能,将N1/N2自动移动到顶部相机看到的位置,但是发现,顶部相机并没有这种功能。
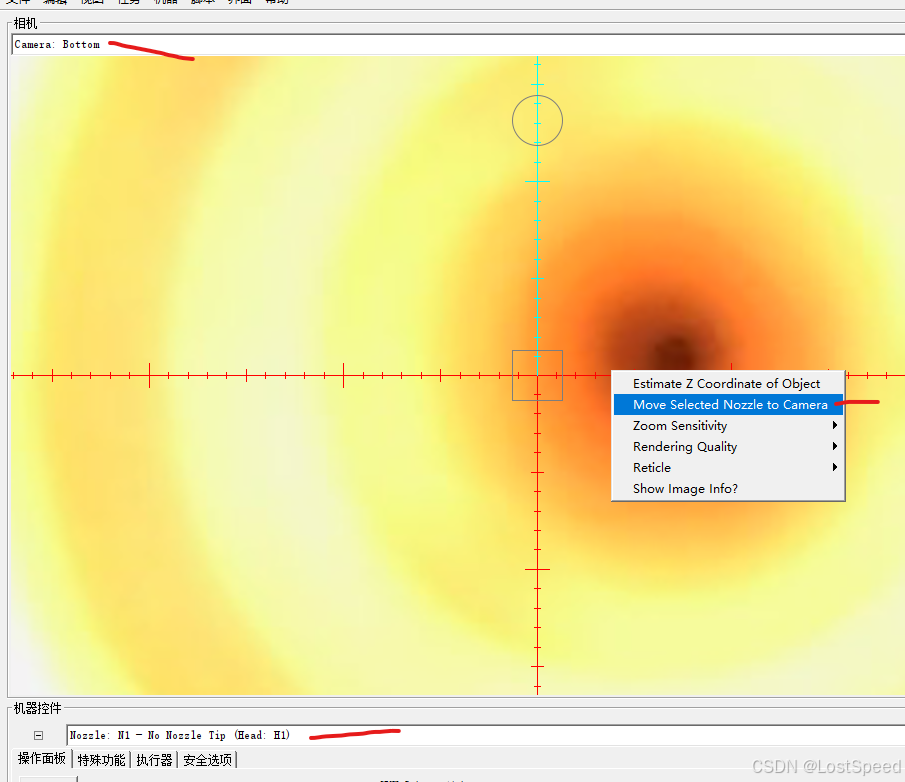
只有底部相机才有这种功能。
那只能确认一下,是否N1/N2的坐标和顶部相机中看到的坐标是否一致?
如果一致(e.g. 顶部相机中看到的坐标是x1,y1, 如果移动N1/N2到x1,y1, 落下N1/N2的吸嘴接触到顶部相机看到的点,就是顶部相机中看到的点),那自己在顶部相机中先看一下吸嘴的位置,然后将N1/N2吸嘴自己JOG过来就行。
笔记
用顶部相机看主基准点
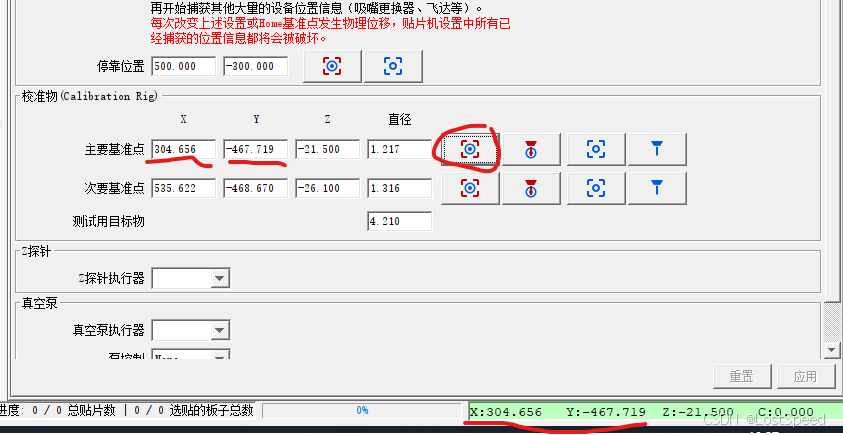
等动作停止后,看到顶部相机中心十字的坐标为(304.656, -467.719), 和主基准点的X/Y坐标一致
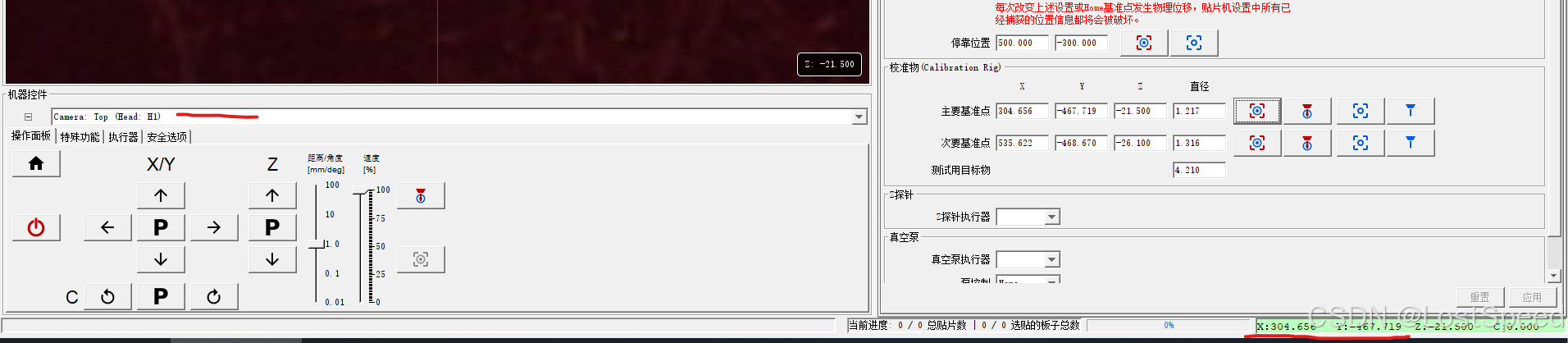
此时,将执行目标换为N1

设备的X,Y轴都没动,看到只是换了执行目标,由顶部相机换成了吸嘴。
现在啥也没动,N1的坐标为(283.358, -542.550)
比较一下这2个坐标。
TopCamera pos = (304.656, -467.719)
N1 pos = (283.358, -542.550)
dx = 283.358 - 304.656 = -21.298
dy = -542.550 - (-467.719) = -542.550 + 467.719 = -74.831
这个差值(dx, dy), 正好对应N1相对于顶部相机的坐标位置。N1正好在顶部相机的左后方(设备坐标方向,X轴从左到右为0~780, Y轴从前到后为0~-540)。
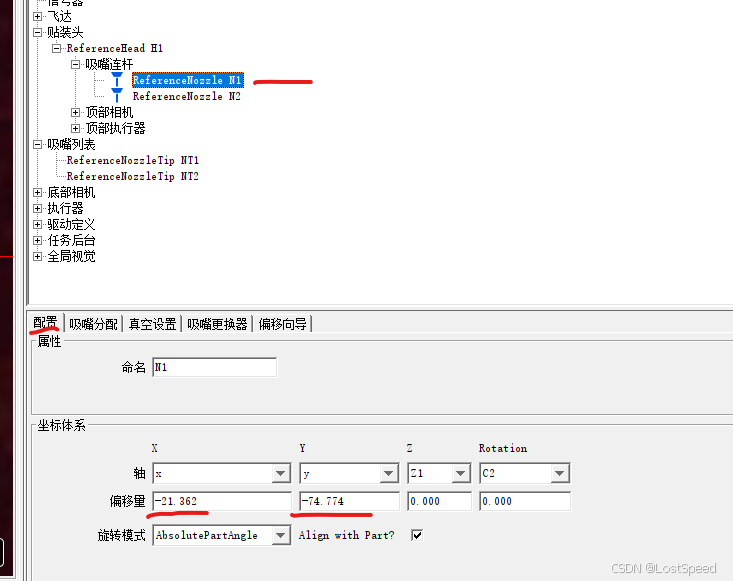
再去看N1标定后记录的坐标值,可以看到,偏移值和算出的基本一致。
dx = 283.358 - 304.656 = -21.298
dy = -542.550 - (-467.719) = -542.550 + 467.719 = -74.831
dx1 = -21.362 - (-21.298) = -21.362 + 21.298 = -0.064
dy1 = -74.774 - (-74.831) = -74.774 +74.831 = 0.057
不一致的地方是标定后openpnp做的补偿引起的变化。
备注
那现在可以确认,所有的执行目标(顶部相机, 底部相机,N1连杆,N2连杆)的坐标都是一个坐标系统。
如果要将吸嘴挪到顶部相机中看到的坐标点,需要做的操作:
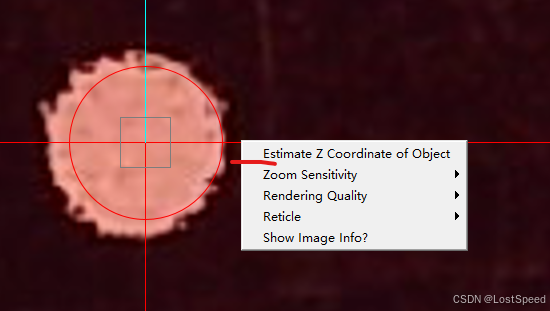
- 将顶部相机移动到工作平台上的目标正上方(e.g. 吸嘴坞中的吸嘴中心上方),记录下顶部相机的XY坐标
- 将执行目标由顶部相机换为N1/N2, 然后看着openpnp右下角的UI提示的坐标, 将N1手工JOG过去。
- 然后慢慢往下落(手工JOG), 就可以落到预想的X/Y坐标
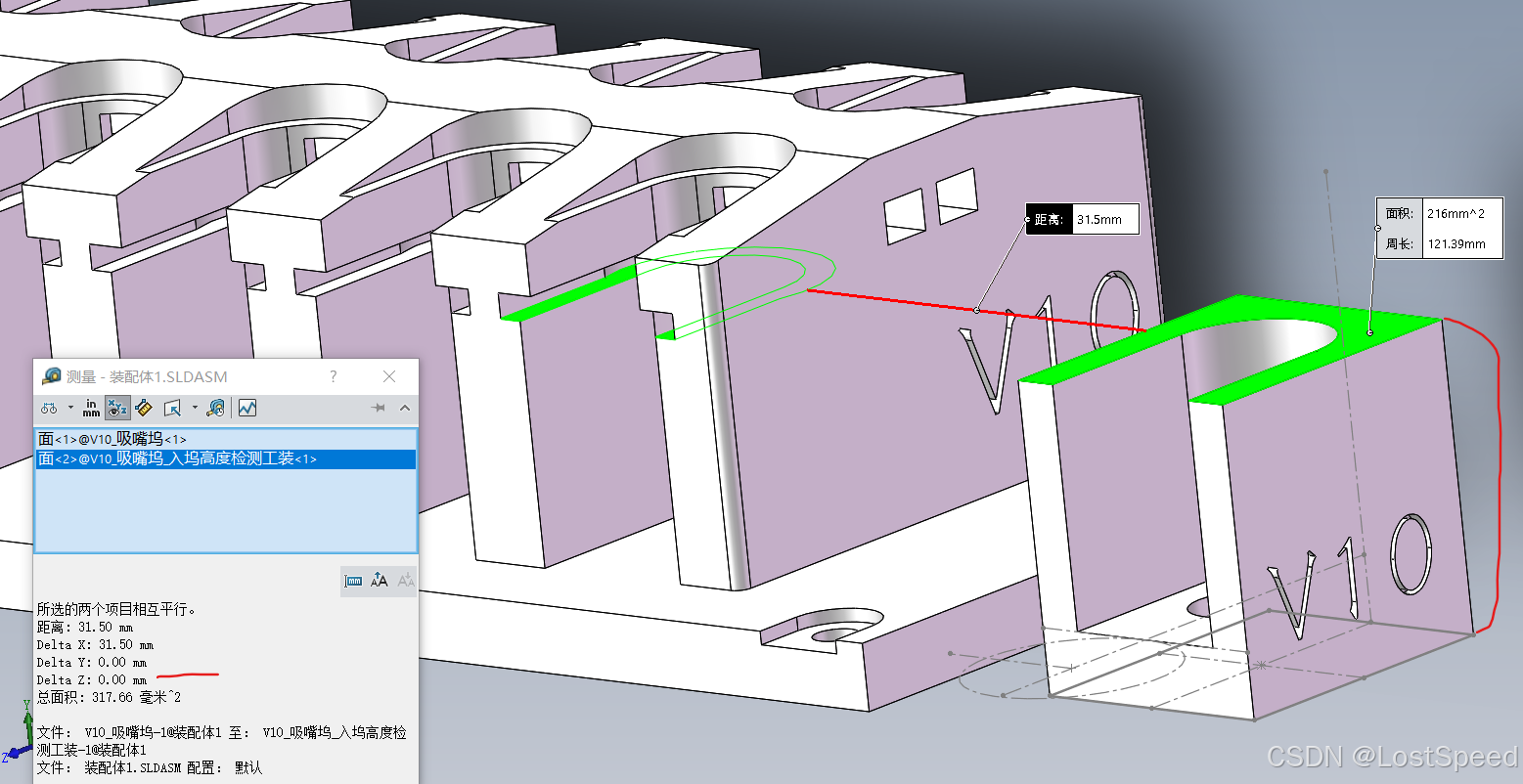
- 至于要落下的高度,因为坐标系统是一个,只要用吸嘴坞入坞检测工装,先检查和确认Z轴高度即可。