持续更新|第12弹:基于yolo算法识别的物体抓取
GraspGen-位姿生成与抓取
本文通过TensorRT加速YoloV8-Pose推理,使用主成分分析实现了一种基于位姿生成工具,实现了实时的位姿生成与抓取。
标签
PiPER机械臂、YoloV8-Pose模型、TensorRT、运动学正逆解、位姿控制、夹爪控制
仓库
- GraspGen:https://github.com/vanstrong12138/GraspGen
- Agilex-Collge:https://github.com/agilexrobotics/Agilex-College/tree/master
环境配置
支持桌面平台与Jetson平台双平台部署
桌面平台
- Ubuntu20.04
- ROS noetic
- NVIDIA Driver Version 470.256.02
- CUDA Version 11.4
- cuDNN 8.4.1
- TensorRT 8.6.1.6
- OpenCV 4.5.3
- 安装NVIDIA显卡驱动
sudo apt update
sudo apt upgrade
sudo add-apt-repository ppa:graphics-drivers/ppa
sudo apt update
sudo apt install nvidia-driver-470
#重启
reboot
- 安装CUDA Toolkit 11.4
-
先前往NVIDIA官网下载CUDA的runfile文件

-
执行安装命令
wget h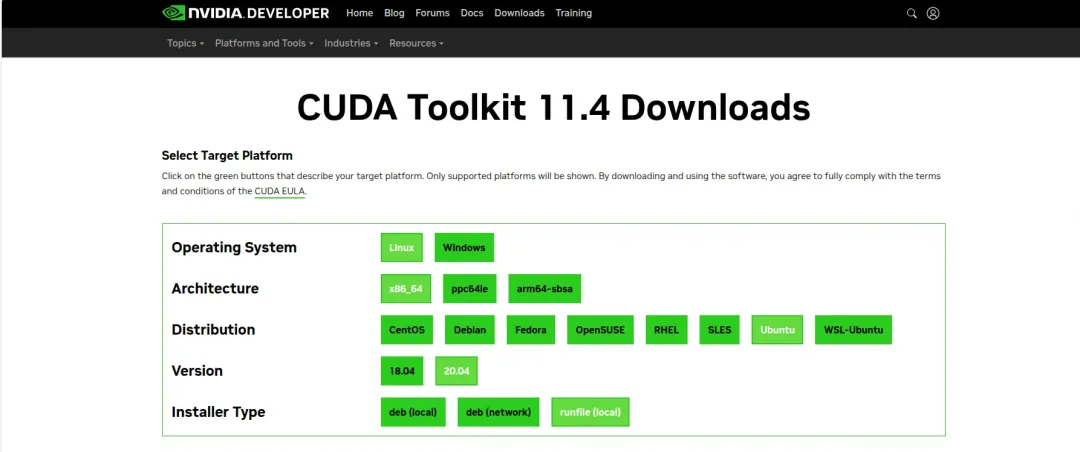
ttps://developer.download.nvidia.com/compute/cuda/11.4.0/local_installers/cuda_11.4.0_470.42.01_linux.run
sudo sh cuda_11.4.0_470.42.01_linux.run
- 安装时取消勾选第一项driver,因为我们第一步已经安装过显卡驱动了
- 添加环境变量
echo 'export PATH=/usr/local/cuda-11.4/bin:$PATH' >> ~/.bashrc
echo 'export LD_LIBRARY_PATH=/usr/local/cuda-11.4/lib64:$LD_LIBRARY_PATH' >> ~/.bashrc
source ~/.bashrc
- 安装后可以执行nvcc -V查看CUDA信息
nvcc -V
- 安装cuDNN
-
去NVIDIA官网下载TensorRT的tar文件,解压后对文件进行拷贝

-
解压后执行下面的命令把cuDNN拷贝到CUDA的安装目录下
sudo cp cuda/include/cudnn*.h /usr/local/cuda/include
sudo cp cuda/lib/libcudnn* /usr/local/cuda/lib64
sudo chmod a+r /usr/local/cuda/include/cudnn*.h /usr/local/cuda/lib64/libcudnn*
- 安装TensorRT,去NVIDIA官网下载TensorRT的tar文件,解压后对文件进行拷贝

- 解压后执行下面的命令把TensorRT拷贝到/usr/local目录下
#解压
tar -xvf TensorRT-8.6.1.6.Linux.x86_64-gnu.cuda-12.0.tar.gz #进入TensorRT-8.6.1.6.Linux.x86_64-gnu.cuda-11.8
cd TensorRT-8.6.1.6.Linux.x86_64-gnu.cuda-11.8/#拷贝到/usr/local目录下
sudo mv TensorRT-8.6.1.6/ /usr/local/
- 测试TensorRT是否安装成功
#进入MNIST手写数字识别的目录下
cd /usr/local/TensorRT-8.6.1.6/samples/sampleOnnxMNIST#编译
make#在/usr/local/TensorRT-8.6.1.6/bin找到可执行文件sample_onnx_mnist
cd /usr/local/TensorRT-8.6.1.6/bin
./sample_onnx_mnist
- 安装带CUDA加速的OpenCV
-
去官网下载OpenCV 4.5.3,解压后进入目录

-
安装opencv依赖
sudo apt install build-essential cmake git pkg-config libgtk-3-dev libavcodec-dev libavformat-dev libswscale-dev libv4l-dev libxvidcore-dev libx264-dev libjpeg-dev libpng-dev libtiff-dev gfortran openexr libatlas-base-dev python3-dev python3-numpy libtbb2 libtbb-dev libdc1394-22-dev
-
Github下载opencv_contrib并将opencv_contrib放入opencv目录里(也可以放在其他目录,但需要修改cmake编译时的命令)
-
预编译,执行下面的命令指定编译时候的参数,注意-D OPENCV_EXTRA_MODULES_PATH=your_opencv-contirb-modules_path修改为自定义的路径
cmake \
-D WITH_CUDA=ON \
-D CUDA_ARCH_BIN="8.6" \
-D WITH_CUDNN=ON \
-D OPENCV_DNN_CUDA=ON \
-D cuDNN_VERSION='8.4' \
-D cuDNN_INCLUDE_DIR='/usr/local/cuda/include' \
-D CUDA_ARCH_PTX="" \
-D OPENCV_EXTRA_MODULES_PATH=/home/khalillee/opencv-4.5.3/opencv_contrib-4.5.3/modules \
-D WITH_GSTREAMER=ON \
-D WITH_LIBV4L=ON \
-D BUILD_opencv_python3=ON \
-D BUILD_TESTS=OFF \
-D BUILD_PERF_TESTS=OFF \
-D BUILD_EXAMPLES=OFF \
-D CMAKE_BUILD_TYPE=RELEASE \
-D CMAKE_INSTALL_PREFIX=/usr/local \
-D ENABLE_FAST_MATH=1 \
-D CUDA_FAST_MATH=1 \
-D WITH_CUBLAS=1 \
-D PYTHON3_EXECUTABLE=$(which python3) \
-D PYTHON3_INCLUDE_DIR=$(python3 -c "from distutils.sysconfig import get_python_inc; print(get_python_inc())") \
-D PYTHON3_PACKAGES_PATH=$(python3 -c "from distutils.sysconfig import get_python_lib; print(get_python_lib())") \
-D OPENCV_ENABLE_NONFREE=ON \
-D PYTHON3_NUMPY_INCLUDE_DIRS=/usr/lib/python3/dist-packages/numpy/core/include \
-D PYTHON3_PACKAGES_PATH=/usr/lib/python3/dist-packages \
-D PYTHON_DEFAULT_EXECUTABLE=$(which python3) \
-D OPENCV_PYTHON3_INSTALL_PATH=/usr/lib/python3/dist-packages \
-D BUILD_opencv_python3=ON \
-D BUILD_opencv_python2=OFF \
-D HAVE_opencv_python3=ON \
-D INSTALL_PYTHON_EXAMPLES=ON \
-D INSTALL_C_EXAMPLES=ON \
-D BUILD_opencv_python3=ON \
-D OPENCV_GENERATE_PKGCONFIG=YES \
..
- 此步骤较慢请耐心等待,完成后正式开始编译
# nproc为CPU线程数量
make -j$(nproc) #安装
sudo make install
- 将OpenCV的库添加到环境
sudo gedit /etc/ld.so.conf.d/opencv4.conf
-
执行此命令后打开的可能是一个空白的文件,只需要在文件末尾加上/usr/local/lib
-
更新系统动态链接器缓存,使系统能够正确地找到库文件
sudo ldconfig
- 配置环境变量,编辑/etc/bash.bashrc
sudo gedit /etc/bash.bashrc#在文件最后添加
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH
#然后保存并退出
- 然后执行source /etc/bash.bashrc使环境变量生效,最后输入pkg-config --modversion opencv4来查看opencv的版本
- 安装此项目所依赖的ROS包
sudo apt install -y ros-noetic-sensor-msgs ros-noetic-image-transport ros-noetic-cv-bridge ros-noetic-vision-msgs ros-noetic-image-geometry ros-noetic-pcl-conversions ros-noetic-pcl-ros ros-noetic-message-filters
Jetson Orin
- Ubuntu20.04
- ROS noetic
- JetPack 5.1.5
- CUDA 11.4.315
- cuDNN 8.6.0.166
- TensorRT 8.5.2.2
-
下载SDKManagerJetPack 5.1.5

-
选择只刷入系统还是刷入全部组件(如果只刷了系统,后续进入系统后还可手动安装上述依赖)

-
如果只安装了系统,则须手动安装依赖;如果在SDKManager中安装了全部组件,则可跳过后续步骤!
sudo apt update && sudo apt upgrade
- 安装CUDA并指定环境变量
sudo apt-get install cuda-toolkit-11-4
# 指定环境变量
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/local/cuda-11.4/lib64
export PATH=$PATH:/usr/local/cuda-11.4/bin
export CUDA_HOME=$CUDA_HOME:/usr/local/cuda-11.4
- 安装cuDNN
sudo apt-cache policy libcudnn8
- 安装TensorRT
sudo apt-cache policy tensorrt
- 安装项目依赖的ROS功能包
sudo apt install -y ros-noetic-sensor-msgs ros-noetic-image-transport ros-noetic-cv-bridge ros-noetic-vision-msgs ros-noetic-image-geometry ros-noetic-pcl-conversions ros-noetic-pcl-ros ros-noetic-message-filters
克隆与编译
- 克隆此项目到本地
cd your_wsgit clone https://github.com/AgilexRobotics/GraspGen.gitcatkin_make
运行
- 启动Piper_kinematics逆解节点
# 逆解
rosrun piper_kinematics piper_ik_node# 交互式标记
rosrun piper_kinematics interactive_pose_marker.py
- 或者一键启动Piper_kinematics逆解节点与交互式标记节点
roslaunch piper_kinematics piper_ik.launch
- 启动Piper驱动节点并拖拽交互式标记至目标位置
cd piper_ros
# 激活CAN接口
./can_activate.sh#启动机械臂驱动节点
roslaunch piper start_single_piper_ik_rviz.launch

- 拖拽交互式标记至目标位置,即可驱动机械臂运动至目标位置

- 启动GraspGen节点
#启动realsense相机节点
roslaunch realsense2_camera rs_aligned_depth.launch #启动GraspGen节点
roslaunch tensorrtx_yolov8_ros yolov8.launch
-
放置物体至相机前方,即可看到GraspGen检测到的物体


-
添加可视化表现插件,可以看到程序正常生成物体的AABB包围盒以及经过主成分分析后的抓取姿态

-
执行抓取任务
- 在GraspGen节点窗口中按下小写s键,可以执行抓取任务