无人机路径规划技术要点与难点分析
一、运行方式:分层协同规划机制
1. 全局规划层(离线预规划)
输入:数字地图、静态障碍物、任务目标(起点、终点、航点)。
算法:
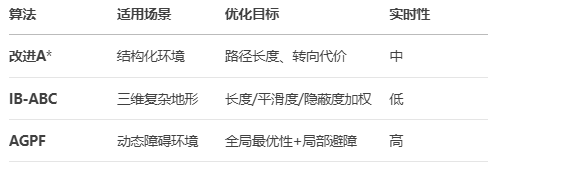
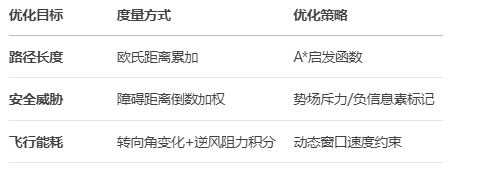
A* 及其改进:引入转向代价函数(如角度变化惩罚)和后处理B样条拟合,解决路径折线问题;
智能优化算法:如IB-ABC(改进蜂群算法)通过雇佣蜂、跟随蜂、侦查蜂三阶段策略,在三维空间中优化路径长度、平滑度与威胁规避的加权适应度函数;
多目标优化:NSGA-II、NMOPSO(导航变量粒子群)生成Pareto前沿解集,平衡路径长度、能耗、威胁等多目标冲突。
输出:初始全局航迹(关键航点序列)。
2. 局部规划层(在线实时调整)
输入:全局航迹 + 实时传感器数据(视觉/激光雷达/气象)。
算法:
动态窗口法(DWA)改进:自适应调整速度窗口和采样分辨率,引入麻雀搜索算法优化评价函数权重,解决复杂障碍规避;
势场法融合:AGPF(A-star引导势场)将全局路径转化为势场梯度,实时生成避障矢量,避免传统APF的局部极小陷阱;
视觉导航辅助:基于深度学习的图像匹配与视觉里程计,在GNSS拒止环境中实现厘米级定位。
输出:平滑、无碰撞的局部轨迹(0.1~1s周期更新)。
3. 协同规划层(多机任务分配)
输入:多机状态、空域约束、任务序列。
机制:
时空冲突检测:基于历史故障数据标记“负信息素”区域,规避高风险空域;
分布式优化:GWO(灰狼优化)或WOA(鲸鱼优化)算法分配航路,优化群体路径总耗时与最小安全间隔。
二、技术要点与难点
(1)核心技术创新
环境建模
栅格-势场混合地图:静态障碍用栅格表达,动态威胁(如风速、降雨)以势场叠加,通过环境影响指数量化风切变/降雨对航迹的扰动。
历史数据学习:利用历史故障坐标构建“危险单元格库”,提升规划可靠性。
多目标决策
高维优化:NMOPSO算法引入导航变量,将6+维目标(长度、时间、威胁、能耗)降维至3维主导空间,加速收敛。
动态权重:IB-ABC算法中隐蔽度(飞行高度)与威胁度(障碍距离)的权重随任务阶段自适应调整。
表:典型全局规划算法特性对比
(2)关键难点与突破方向
1. 动态环境适应性
难点:传统算法对突发障碍响应延迟,强风扰动导致轨迹漂移。
解决方案:
DWA融合实时风速向量($E_{env} = \rho \cdot |\vec{v}_{up}| + \kappa \cdot \|\vec{w} \times \vec{v}\|$);
视觉-IMU紧耦合定位,30Hz更新障碍物位置。
2. 多目标冲突权衡
难点:路径短↔️安全性、低能耗↔️高速度等目标存在本质矛盾。
解决方案:
Pareto解集交互式选择;
势场权重动态调节:靠近终点时降低斥力权重以提升精度。
表:路径规划多目标优化要素*
3. 计算效率瓶颈
难点:A*算法在三维栅格中搜索节点数指数增长;NSGA-II种群迭代耗时长。
突破:
稀疏A*预规划+局部势场(AGPF),计算开销降低40%;
WOA算法路径平滑性优于PSO,收敛速度提升2倍。
4. 环境感知不确定性
难点:视觉定位在低光照/纹理缺失时失效;射频干扰导致通信中断。
对策:
多模态传感器融合(激光雷达+双目视觉+UWB备份);
仿生脉冲通信协议,抗干扰传输指令。
5. 多机协同复杂性
难点:路径交叉风险、通信拓扑动态变化。
机制:
时空走廊(Spatio-Temporal Corridor)约束各机时空位置;
基于强化学习的分布式冲突消解策略(专利CN120370977A)。
表:主要技术难点与解决路径

三、总结与趋势
无人机路径规划模块正朝强鲁棒性、高自主性、群体智能化方向发展:
融合规划架构成为主流(如AGPF、改进DWA),平衡全局最优与局部响应;
环境智能感知是突破重点:深度学习提升视觉定位精度,多源数据驱动风险预测;
群体协同自主是终极目标:基于联邦学习的分布式规划将降低对中心节点的依赖。
