FOC算法六步算法 以及 Vds保护是什么
FOC(Field-Oriented Control,磁场定向控制)是一种用于电机(尤其是交流电机如永磁同步电机PMSM或感应电机IM)的高性能控制技术。其核心思想是通过坐标变换,将电机的三相电流分解为独立的磁场分量(励磁分量)和转矩分量,从而像控制直流电机一样简单高效地控制交流电机。
关键原理:
坐标变换:
Clark变换:将三相静止坐标系(ABC)转换为两相静止坐标系(αβ)。
Park变换:将两相静止坐标系(αβ)转换为随转子磁场旋转的坐标系(dq)。
在dq坐标系中,直轴电流(IdId)控制磁场强度,交轴电流(IqIq)控制转矩,实现解耦控制。
控制目标:
通过调节IdId和IqIq,精确控制电机的磁场和转矩,实现快速响应、高效率和低噪音。
典型FOC系统组成:
电流采样:检测电机三相电流。
坐标变换:通过Clark/Park变换得到IdId和IqIq。
PI调节器:分别控制IdId和IqIq,输出对应的电压指令VdVd和VqVq。
逆Park变换:将Vd/VqVd/Vq转换回静止坐标系(αβ)。
SVPWM:生成驱动逆变器的PWM信号,控制电机。
优势:
高动态性能:转矩响应快,适合需要频繁启停或调速的场景(如电动汽车、机器人)。
高效率:通过优化IdId和IqIq减少损耗,尤其在低速大转矩工况下。
平滑运行:抑制转矩脉动,降低噪音和振动。
应用场景:
电动汽车驱动电机
工业伺服系统
家电(如变频空调、洗衣机)
无人机电调(ESC)
对比其他控制方法:
六步方波控制:简单但转矩波动大,效率低。
正弦波控制:改善平滑性,但未解耦磁场与转矩。
FOC:实现完全解耦,性能最优,但算法复杂,依赖高精度传感器(如编码器)。
挑战:
需要实时计算坐标变换和PI调节,对处理器算力要求较高。
依赖转子位置信息(需编码器或观测器算法如滑模观测器)。
FOC因其卓越的控制性能,已成为现代高性能电机驱动的标准技术之一。
电机驱动或功率电子系统中,MOSFET的VDS检测(漏源极电压检测)是一项关键功能,主要用于实现电路保护、状态监控和优化控制。以下是其核心作用及具体应用场景:
1. 核心功能
过流/短路保护:
VDS直接反映MOSFET的导通电流(IDID)。根据欧姆定律,导通时VDS=ID⋅RDS(on)VDS=ID⋅RDS(on)(RDS(on)RDS(on)为导通电阻)。若电流异常增大(如电机堵转、短路),VDS会显著升高,通过实时检测VDS可快速触发关断,防止MOSFET过热损坏。故障诊断:
检测VDS异常(如开路、击穿)可判断MOSFET是否失效。例如,正常导通时VDS应接近0V(低压降),若持续高电压则可能器件损坏。电流间接测量:
在无电流传感器时,通过VDS和已知的RDS(on)RDS(on)估算电流(需温度补偿,因RDS(on)RDS(on)随温度变化)。
2. 典型应用场景
(1)电机驱动(如FOC控制)
动态电流保护:
在PWM周期内实时监测VDS,若超过阈值(如因电机过载导致电流骤升),立即关闭驱动信号,避免MOSFET烧毁。退饱和检测(Desaturation Detection):
高压应用中(如电动汽车),MOSFET意外退出饱和区时VDS急剧上升,专用驱动芯片(如IGBT驱动)会通过VDS检测触发保护。
(2)电源管理
同步整流控制:
在DC-DC变换器中,通过检测VDS判断体二极管导通时机,优化同步整流MOSFET的开关时序,提高效率。
(3)无感电流采样
低成本方案:
利用MOSFET的RDS(on)RDS(on)作为采样电阻,通过VDS反推电流(需校准非线性误差)。
3. 实现方式
硬件电路:
分压电阻+比较器:VDS经分压后与阈值比较,触发保护信号。
专用驱动IC:如TI的DRV系列、Infineon的EiceDRIVER™,集成VDS检测和硬件保护逻辑(响应时间<1μs)。
软件处理:
MCU通过ADC采样VDS,软件判断异常(速度较慢,适合非紧急保护)。
4. 设计注意事项
抗干扰:
VDS检测电路需避免高频开关噪声干扰(如加RC滤波)。温度补偿:
RDS(on)RDS(on)随温度升高而增大,需校准或选用温度系数低的MOSFET。响应速度:
过流保护需在微秒级响应,硬件保护比软件更可靠。
5. 对比其他检测方法
| 方法 | 优点 | 缺点 |
|---|---|---|
| VDS检测 | 低成本、无需额外传感器 | 精度受RDS(on)RDS(on)和温度影响 |
| 电流传感器 | 高精度(如霍尔传感器) | 成本高、体积大 |
| 采样电阻 | 线性度高 | 引入功率损耗 |
总结
MOS的VDS检测是功率电子系统中的“安全卫士”,通过实时监控漏源极电压,快速响应过流、短路等故障,同时可辅助实现低成本电流采样。在电机驱动、电源转换等场景中,它是保障系统可靠性的关键技术之一。
六步和FOC都是无感的嘛
六步方波控制(Six-Step Commutation)和FOC(磁场定向控制)都可以实现无感(无传感器)运行,但两者的实现方式、性能和应用场景有显著差异。 以下是详细对比:
1. 是否支持无感运行?
六步方波控制:
天然支持无感:通过检测电机的反电动势(Back-EMF)过零点来换相,无需位置传感器(如霍尔或编码器)。
典型应用:低成本无刷直流电机(BLDC)驱动,如风扇、电动工具。
FOC控制:
可无感,但需算法支持:通过观测器(如滑模观测器、龙伯格观测器、高频注入)估算转子位置和速度,替代物理传感器。
典型应用:高性能永磁同步电机(PMSM)或感应电机(IM),如无人机、伺服系统。
2. 无感实现的原理对比
| 控制方法 | 无感原理 | 技术难点 |
|---|---|---|
| 六步方波 | 检测反电动势过零点,每60°电角度换相一次。 | 低速时反电动势微弱,难以检测(需“开环启动”)。 |
| FOC | 基于电机数学模型,通过电流/电压反馈实时估算转子位置(如滑模观测器)。 | 低速和零速时估算精度下降(高频注入可改善)。 |
3. 性能差异
| 特性 | 六步方波(无感) | FOC(无感) |
|---|---|---|
| 转矩平滑性 | 差(转矩脉动大,每60°换相一次) | 优(连续控制,转矩平稳) |
| 效率 | 较低(电流谐波多,铜损高) | 高(正弦电流,损耗低) |
| 低速性能 | 差(依赖反电动势,低速时失效) | 较好(观测器支持低速运行,高频注入可零速) |
| 动态响应 | 慢(换相延迟) | 快(实时解耦控制) |
| 复杂度 | 简单(硬件需求低) | 复杂(需高算力MCU,算法调试难) |
4. 典型应用场景
六步方波无感:
对成本敏感、中高速运行的场景,如家用电器(洗衣机、吸尘器)、电动自行车。
无需精确调速或转矩控制的场合。
FOC无感:
高性能需求场景,如无人机电调(ESC)、机器人关节、电动汽车驱动。
需要宽调速范围、高动态响应的系统。
5. 关键结论
六步方波的无感是“被动式”:依赖反电动势,天然无需传感器,但性能受限。
FOC的无感是“主动式”:通过算法估算位置,实现接近有感FOC的性能,但对模型精度和算力要求高。
选择依据:
预算低、中高速运行 → 六步方波无感。
高性能、全速域控制 → FOC无感(需搭配先进观测器)。
附加说明:无感FOC的挑战
零速/低速难题:传统观测器在接近零速时失效,需高频注入(HFI)等特殊方法。
参数敏感性:电机参数(如电阻、电感)变化会影响观测器精度,需在线辨识。
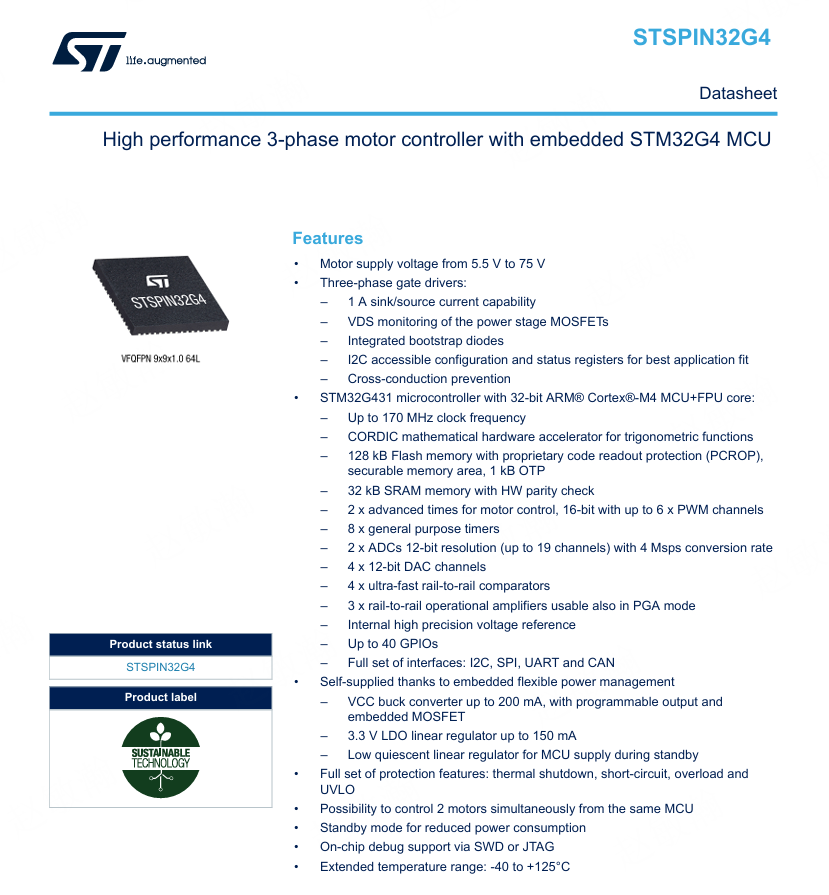
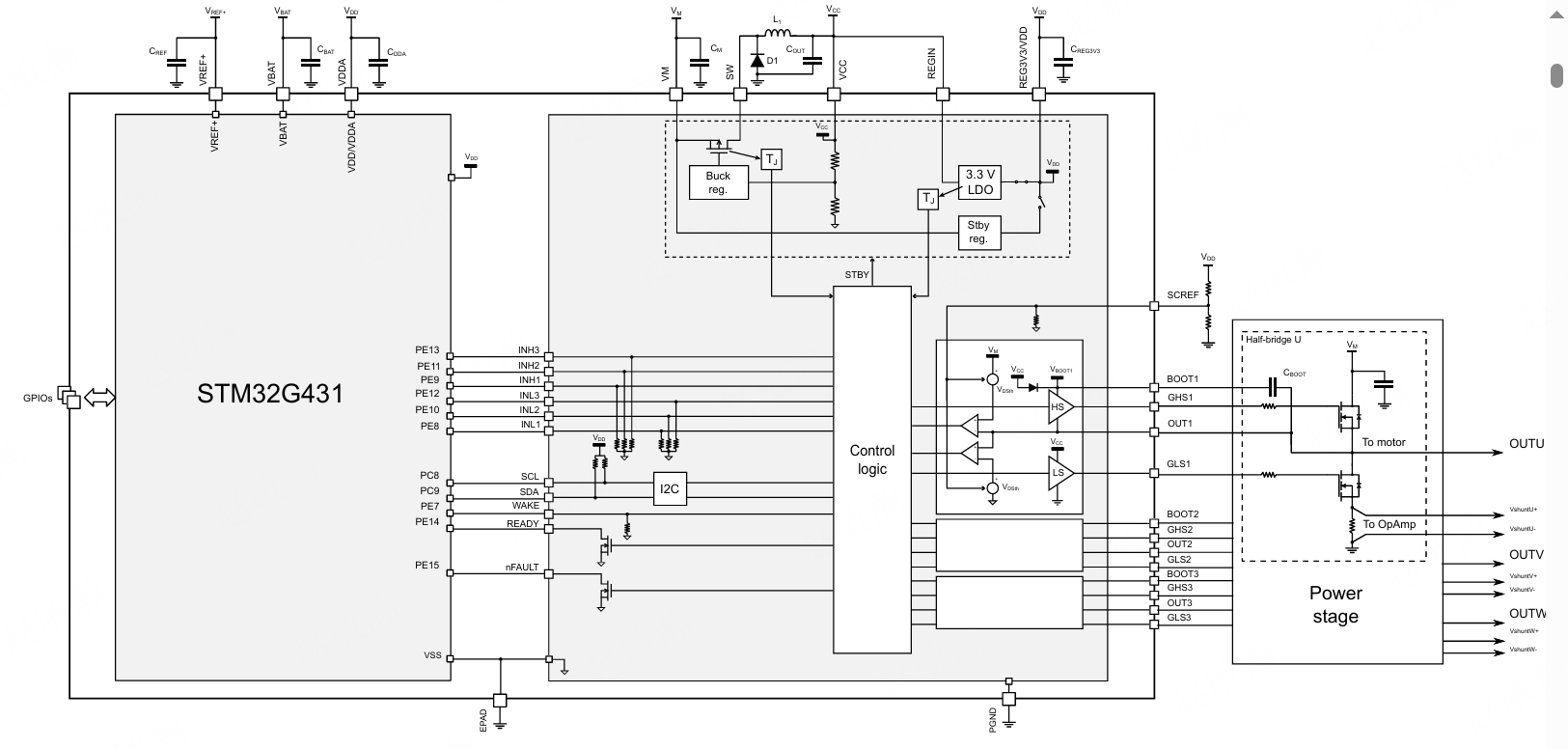
电机电源在5.5V-75V都支持
三相门驱:1A的驱动能力
通过嵌入式电源管理实现自供电