灵巧手(具身智能入门十一)
源自论文:The Developments and Challenges towards Dexterous and Embodied Robotic Manipulation: A Survey
机器人末端执行器(End-Effector) 和机械手(Manipulator) 的发展历程
该论文从硬件演进角度,梳理了机器人末端执行器(End-Effector) 和机械手(Manipulator) 的发展历程,强调其从简单结构向高灵巧性、高适应性的迭代,为机器人灵巧操作奠定了硬件基础。以下是具体进展的详细描述:
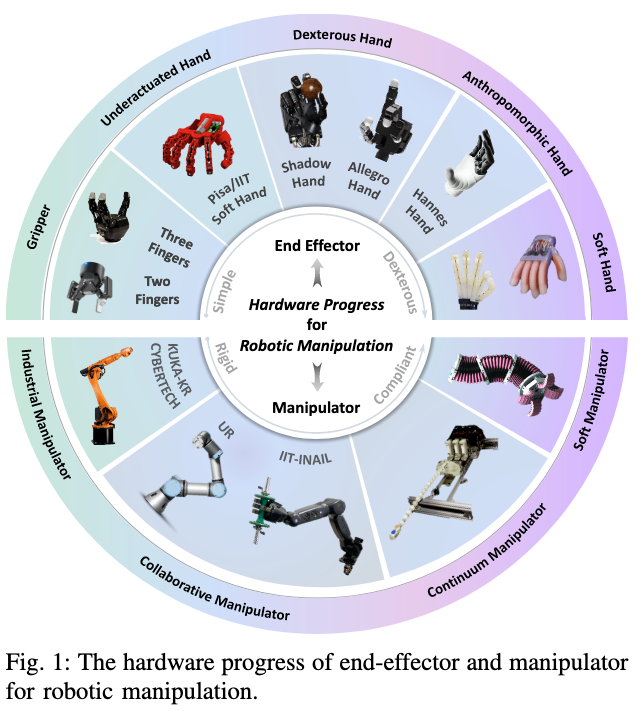
一、机械手(Manipulator)的硬件进展
机械手是机器人实现操作的“肢体”,其演进核心是从固定场景的刚性执行向动态环境的柔性交互升级,具体分为三个阶段:
1. 传统工业机械手(机械编程阶段)
- 核心特征:结构刚性、运动轨迹固定,仅支持预编程的重复操作,无环境适应能力。
- 技术特点:
- 采用刚性连杆和伺服电机驱动,自由度(DoF)较少(通常3-6DoF);
- 缺乏外部传感器(如视觉、力觉),仅依赖精确的机械定位;
- 典型应用:
- 代表产品:PUMA560机械臂、Unimate工业机器人;
- 场景:结构化工厂的焊接、搬运、简单装配(如汽车零部件流水线)。
2. 协作机械手(闭环控制阶段)
- 核心特征:引入感知与反馈机制,支持人机协作和半结构化环境操作。
- 技术特点:
- 增加力控传感器和视觉模块(如“眼在手上”Eye-in-Hand相机),实现力-位混合控制;
- 结构轻量化,加入碰撞检测功能(如柔性关节),确保人机交互安全;
- 典型应用:
- 代表产品:ABB YuMi双臂协作机器人;
- 场景:电子元件装配、小型零件分拣(可适应工件位置微小变化)。
3. 特殊功能机械手(具身智能阶段)
- 核心特征:针对复杂环境设计,通过结构创新实现高适应性操作。
- 技术分类与案例:
- 连续体机械手(Continuum Manipulator):
- 结构:无刚性关节,通过连续弯曲变形(如蛇形、象鼻形)适应狭窄或不规则空间;
- 应用:医疗手术(如腹腔镜操作)、管道检测(可绕过障碍物)。
- 软体机械手(Soft Manipulator):
- 结构:采用硅胶、弹性材料制成,通过气压/液压驱动变形;
- 优势:可适应不规则形状物体(如抓取水果、柔性包装),避免刚性接触损伤;
- 代表:基于软材料的水下机械手(如用于海底生物采样)。
- 协作型移动机械手:
- 结构:结合移动平台(如轮式、履带式)与机械臂,扩展操作范围;
- 优势:从固定工位走向动态环境(如家庭服务、仓储物流)。
- 连续体机械手(Continuum Manipulator):
二、末端执行器(End-Effector)的硬件进展
末端执行器是机器人与物体直接交互的“手部”,其演进核心是从单一抓取向多模态灵巧操作升级,具体分为四类:
1. 并行夹持器(Parallel Gripper)
- 核心特征:结构最简单,仅支持“开合”动作,适用于基础抓取。
- 技术特点:
- 2指或3指结构,通过单一驱动控制开合(如气动或电机驱动);
- 无独立手指关节,仅能实现“夹取”动作,无法完成旋转、捏握等精细操作;
- 典型应用:
- 代表产品:Robotiq自适应夹持器;
- 场景:工业流水线的“拾取-放置”(如抓取立方体、圆柱体工件)。
2. 欠驱动柔性手(Soft Underactuated Hands)
- 核心特征:通过结构设计实现被动适应性,兼顾抓取稳定性与成本控制。
- 技术特点:
- 手指数量4-5指,但驱动单元少于自由度(如用1个电机驱动多关节联动);
- 手指采用柔性材料或弹性结构,接触物体时可被动贴合形状(如包裹式抓取);
- 典型优势与局限:
- 优势:结构简单、成本低,适合抓取形状不规则物体(如工具、日常用品);
- 局限:无法主动控制单个手指运动,精细操作能力有限;
- 典型产品:Pisa/IIT SoftHand 2(通过“协同运动”实现自适应抓取)。
3. 刚性灵巧手(Rigid Dexterous Hands)
- 核心特征:高自由度、主动控制,支持类人化精细操作。
- 技术特点:
- 4-5指结构,每个手指含3-4个独立驱动关节(总DoF可达15-20+);
- 采用精密伺服电机和减速机构,可精确控制手指位置和力度;
- 集成传感器(如指尖力觉、关节位置传感器),实现力反馈控制;
- 典型应用:
- 代表产品:Shadow Hand(手指纤细,可完成拧瓶盖、握笔等动作)、Allegro Hand;
- 场景:科研级灵巧操作(如装配微小零件、操作工具)。
4. 高度拟人化手(Highly Anthropomorphic Hands)
- 核心特征:结构与功能接近人类手,追求形态与操作能力的双重拟人化。
- 技术特点:
- 手指尺寸、关节分布模仿人类(如拇指可对掌,手指可独立弯曲);
- 集成多模态传感器(如触觉阵列、温度传感器),模拟人类皮肤感知;
- 驱动系统轻量化(如采用微型电机或绳索传动),减少对操作空间的限制;
- 典型产品:
- Hannes Hand Prosthesis(假肢,可复制人类手的关键生物力学特性);
- 类人机器人手(如波士顿动力相关研究,支持手势表达与精细操作);
- 应用潜力:医疗康复(假肢)、人机交互(如服务机器人的手势沟通)。
三、硬件进展的核心趋势总结
-
从“刚性”到“柔性”:
早期机械手和末端执行器以刚性结构为主,仅适应固定场景;现在通过软体材料、欠驱动设计,实现对复杂形状物体的自适应操作(如软体手抓取鸡蛋不破损)。 -
从“单一功能”到“多模态交互”:
从仅能完成“夹取”的夹持器,发展到可实现“捏、拧、旋转、投掷”等复杂动作的灵巧手;同时集成视觉、力觉、触觉传感器,提升对环境的感知能力。 -
从“结构化场景”到“非结构化场景”:
硬件设计从适配工厂固定工位,转向支持家庭、医疗、户外等动态环境——例如连续体机械手适应狭窄空间,移动机械手扩展操作范围。 -
拟人化程度提升:
多指灵巧手的自由度、手指尺寸、运动灵活性逐渐接近人类手(如Shadow Hand的手指纤细度),为类人灵巧操作(如用筷子、系鞋带)提供硬件基础。
总结
机器人末端执行器和机械手的硬件进展,是机器人从“工业自动化工具”向“具身智能系统”演进的基础。其核心逻辑是:通过结构创新(如柔性材料、高自由度设计)和感知增强(如多模态传感器),突破传统刚性操作的局限,为适应非结构化环境和实现类人灵巧操作提供可能。这些硬件进步与后续的数据收集、技能学习框架结合,共同推动机器人操作能力的提升。
机器人操作技术的发展历程
根据该论文,机器人操作技术的发展历程被明确划分为三个阶段——机械编程阶段、闭环控制阶段和具身智能操作阶段。这三个阶段的演进不仅体现了硬件结构的升级,更反映了机器人从“被动执行”到“主动适应”再到“类人交互”的核心目标变迁。以下是各阶段的详细特征:
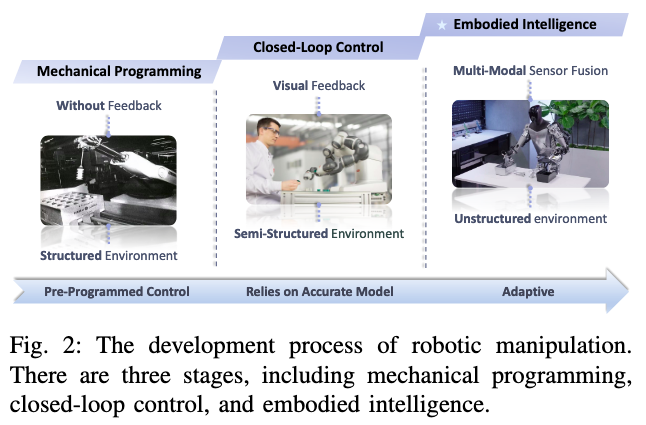
一、机械编程阶段(Mechanical Programming Stage)
核心特征
这是机器人操作的初始阶段,核心依赖预编程的机械轨迹,完全缺乏外部环境感知能力,仅能执行固定动作。
技术特点
- 控制逻辑:机器人的运动参数(如关节角度、末端位置)被提前写入控制器,全程按固定程序执行,无任何环境反馈调节。例如,机械臂的抓取位置、运动路径完全预设,若工件位置偏移则会失败。
- 硬件基础:以传统工业机械臂为主(如PUMA560),末端执行器多为简单并行夹持器(两指或三指),自由度低(通常3-6个自由度),结构刚性强。
- 应用场景:仅限高度结构化的工业环境,如汽车生产线的焊接、搬运,或电子厂的固定位置零件拾取。任务需满足“重复性高、环境无变化”(如抓取形状统一的刚性工件)。
局限性
- 无外部感知能力:无法识别工件位置偏移、形状变化等环境扰动。
- 适应性为零:一旦脱离预设场景(如工件倾斜),操作立即失效。
二、闭环控制阶段(Closed-Loop Control Stage)
核心特征
引入视觉反馈形成闭环控制,机器人可根据环境变化微调动作,首次具备基础适应性。
技术特点
- 控制逻辑:通过“手眼相机(Eye-in-Hand)”或“固定相机(Eye-to-Hand)”获取视觉信息,基于特征跟踪(如识别工件边缘)实时调整运动轨迹。例如,若相机检测到工件位置偏移,控制器会自动修正抓取坐标。
- 硬件基础:机械臂升级为协作机器人(如ABB YuMi),末端执行器开始采用欠驱动设计(如自适应夹持器),可适应轻微形状差异的物体;新增视觉传感器,但仍缺乏力、触觉感知。
- 应用场景:扩展至半结构化环境,如电子元件装配线,可完成“零件对齐”“柔性抓取”等任务(如抓取不同尺寸的电阻)。
局限性
- 依赖精确环境建模:需提前获取工件的3D模型或特征参数,若遇到透明物体(如玻璃杯)、柔性物体(如布料)等难以建模的对象,性能大幅下降。
- 反馈单一:仅依赖视觉,无法感知力度(如抓取鸡蛋时易捏碎),仍无法应对复杂物理交互。
三、具身智能操作阶段(Embodied Intelligent Manipulation Stage)
核心特征
借助人工智能(AI)实现“感知-决策-执行”端到端闭环,机器人通过多模态感知理解环境,自主学习操作技能,可适应动态非结构化环境(如家庭、户外)。
技术特点
- 控制逻辑:融合视觉、力觉、触觉等多模态传感器数据(如指尖触觉感知物体硬度、视觉识别物体姿态),通过深度学习或强化学习自主决策动作。例如,抓取变形物体时,可根据触觉反馈实时调整手指力度分布。
- 硬件基础:
- 机械臂:出现连续体机械臂(如蛇形臂,可弯曲绕过障碍物)、软体机械臂(如硅胶材质,适合抓取易碎品);
- 末端执行器:升级为多指灵巧手(如Shadow Hand),自由度达20+,可模拟人类手指的精细动作(如拧瓶盖、握笔)。
- 应用场景:突破工业场景限制,向家庭服务(如整理衣物)、医疗(如微创手术)、户外救援(如抓取不规则废墟碎片)等非结构化场景延伸,可处理线缆、布料、人体组织等复杂物体。
优势与挑战
- 优势:首次具备“类人级”环境适应能力,无需预设模型即可通过学习掌握新技能(如从人类演示中学会使用工具)。
- 挑战:高自由度多指手的动作控制难度大(需处理多手指接触动力学);依赖大规模高质量交互数据(如真实场景中的抓取轨迹),但数据收集成本高。
总结:三阶段演进逻辑
三个阶段的核心差异在于“环境交互能力”:
- 机械编程阶段:“被动执行”——仅按预设程序动作,与环境无交互;
- 闭环控制阶段:“有限适应”——通过视觉反馈修正动作,但依赖环境模型;
- 具身智能阶段:“主动学习”——通过多模态感知和AI学习,自主适应动态环境。
论文强调,具身智能阶段是当前实现“类人灵巧操作”的核心方向,但其发展需突破“数据质量”“学习效率”“复杂交互建模”三大瓶颈。
从夹持器到多指手的灵巧操作挑战
根据论文内容,“从夹持器到多指手的灵巧操作挑战”聚焦于机器人在物理交互中面临的核心障碍——随着末端执行器从简单夹持器升级为多指灵巧手,操作场景的复杂性和技能学习的难度呈指数级增长。以下从“物理世界交互复杂性”“简单夹持器的局限性”“多指灵巧手的学习难点”三个维度详细阐述:
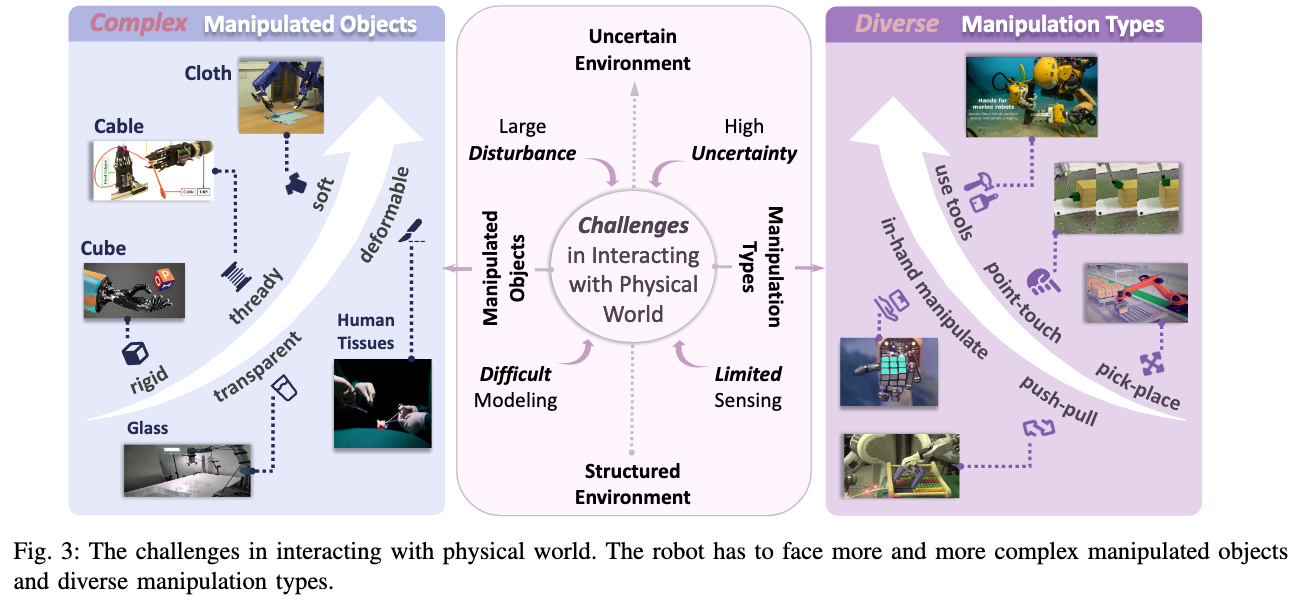
一、物理世界交互的固有复杂性:操作对象与任务的双重挑战
机器人从结构化工业场景(如抓取刚性工件)转向非结构化环境(如家庭、医疗)时,首先面临“物理世界交互的复杂性”,这是灵巧操作的底层挑战,具体体现在两方面:
- 操作对象的复杂性
传统工业场景中,机器人操作的多为形状规则、材质刚性的物体(如立方体、圆柱体工件),建模和抓取难度低。而当前灵巧操作需应对的对象呈现“高复杂性”:
- 变形/柔性物体:如布料(易褶皱)、线缆(易缠绕)、人体组织(易损伤),其形态会随外力变化,难以通过固定模型预测;
- 特殊属性物体:如透明玻璃(视觉识别难)、光滑金属(易滑动),感知和稳定抓取需精确力控;
- 不规则物体:如日常用品(勺子、钥匙),形状无固定规律,需多指协同调整接触点。
这些物体的物理特性(如形变、摩擦、透光性)导致“建模难”——传统基于几何模型的控制方法完全失效,必须依赖实时感知(如触觉反馈)动态调整策略。
- 操作类型的多样性
除了基础“拾取-放置”,灵巧操作需完成更复杂的交互任务,对末端执行器的灵活性要求极高:
- 精细接触操作:如“点触滑动”(用指尖推动小物体调整位置)、“拧转”(拧瓶盖、调旋钮),需控制单个手指的微小位移;
- 手内操作:如“手内旋转物体”(用多指协作将钢笔从水平转至垂直),需多手指协同发力且避免物体滑落;
- 工具使用:如“握笔写字”“用剪刀剪纸”,需模拟人类手指的分工(如拇指固定、食指发力)。
这些任务不再是“单一夹持”,而是“多步协同交互”,要求末端执行器具备“多自由度+力控精度”的双重能力。
二、简单夹持器的局限性:无法突破“低自由度-少接触点”的瓶颈
目前多数机器人仍依赖“两指/三指简单夹持器”,这类末端执行器在工业场景中可完成基础任务,但在灵巧操作中存在致命局限,成为从“基础抓取”到“灵巧操作”的第一层障碍:
-
接触点少,稳定性不足
简单夹持器通过“两指开合”实现抓取,仅能提供2-3个接触点,且接触方式固定(如“夹捏”)。对于形状不规则或易滑动的物体(如圆形玻璃杯、光滑球体),难以形成“力封闭”(即无法通过接触力平衡物体重力和外力),易出现滑落。例如:用两指夹持器抓取倾斜的玻璃杯时,因接触点少且无法调整手指角度,极易导致杯子倾倒。 -
自由度低,无法完成复杂动作
两指夹持器的自由度通常仅1-2个(仅控制开合角度),无法实现手指独立运动。因此,无法完成需要“多指协同”的任务:如“手内旋转物体”(需拇指与其他手指反向发力)、“工具使用”(如握笔时食指与中指配合调整笔尖方向)。
论文明确指出:“简单夹持器的结构限制使其只能完成‘基础抓取’,而灵巧操作的核心(如精细力控、多步交互)必须依赖多指灵巧手,但这一升级会引入新的挑战。”
三、多指灵巧手的学习难点:高自由度与复杂接触动力学的双重障碍
多指灵巧手(如Shadow Hand、Allegro Hand)是实现类人灵巧操作的核心硬件——其手指数量(4-5指)、自由度(单指3-4个关节,总自由度20+)接近人类手,可提供多接触点和灵活运动。但这种“高拟人化”也使其技能学习难度剧增,成为从“夹持器到多指手”的核心挑战:
- 高自由度导致“高维空间搜索困境”
多指灵巧手的“总自由度”是简单夹持器的10倍以上(如Shadow Hand有24个自由度),对应的“动作空间”呈指数级扩大。例如:仅调整5根手指的关节角度,就可能产生数百万种组合。
- 对于强化学习(RL)等主流算法,需在高维空间中探索“有效动作”(如找到稳定抓取的手指姿态),但多数探索是无效的(如手指互相碰撞),导致学习效率极低——往往需要数百万次迭代才能掌握一项简单技能(如抓取不规则物体)。
- 相比之下,两指夹持器的动作空间简单(仅开合角度),算法可快速收敛。
- 多接触点引发“复杂接触动力学”
人类手部操作时,手指与物体的接触是“动态且多触点”的(如握杯子时,拇指、食指、中指分别施加不同力度),这种“多接触交互”的力学特性极复杂:
- 接触状态多变:可能出现“滑动-静止”“单点接触-多点接触”的实时切换(如抓取湿滑物体时,某根手指突然滑动);
- 力传递耦合:某根手指的力度变化会影响其他手指的受力(如食指发力增加,可能导致物体向拇指方向倾斜)。
这些特性使得“接触建模”难度极大——传统基于物理公式的建模方法(如力封闭检测)无法覆盖所有场景,而数据驱动的学习方法又因“接触状态的稀疏性”(难以收集所有可能接触场景的数据)难以泛化。
总结:从“夹持器到多指手”的挑战本质
从简单夹持器到多指灵巧手的升级,本质是机器人从“低维度、低交互”操作向“高维度、高动态”操作的跨越。核心挑战可概括为:
- 底层障碍:物理世界中“复杂物体+多样任务”的交互需求,倒逼末端执行器从夹持器升级为多指手;
- 直接障碍:多指手的“高自由度”和“多接触动力学”使技能学习难度剧增,而现有数据收集(如仿真数据存在“虚实差距”)和算法(如强化学习样本效率低)尚未完全突破这些瓶颈。
论文强调:“解决这些挑战是实现类人灵巧操作的关键——只有让多指手像人类手一样‘感知接触、调整力度、协同动作’,才能真正适应非结构化环境。”
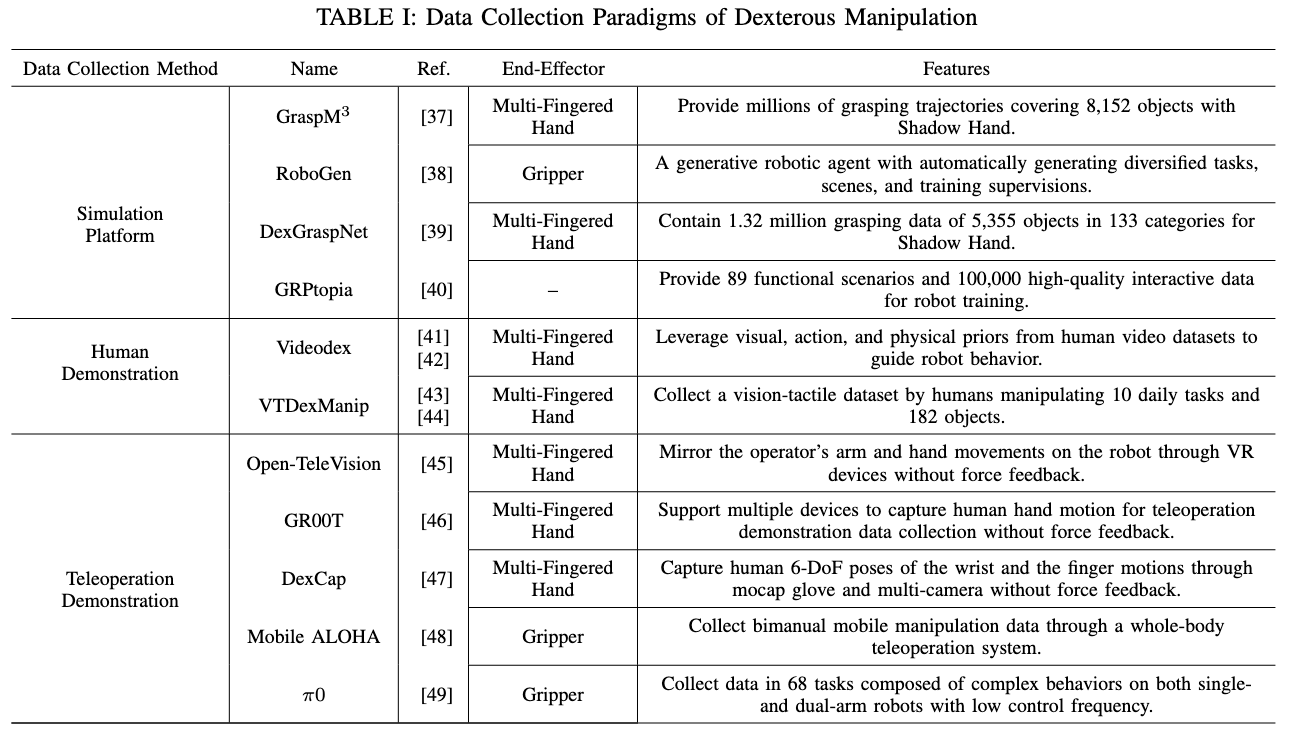
灵巧操作的数据收集
根据该论文,灵巧操作的数据收集是机器人学习类人操作技能的核心基石。针对“如何获取大规模、高质量的交互数据”这一关键问题,论文总结了三类主流范式——基于仿真平台的数据生成、基于人类演示的数据收集、基于遥操作演示的数据收集,并分析了各类范式的技术特点、典型案例及优劣势。以下是详细阐述:
一、基于仿真平台的数据生成(Simulation-Based Data Generation)
核心逻辑
通过物理仿真引擎构建虚拟环境,快速生成大规模操作数据(如抓取轨迹、接触力信息),解决真实世界数据收集“成本高、效率低、风险大”的问题。
技术特点
- 依赖工具:基于成熟物理引擎(如PyBullet、MuJoCo、Isaac Sim)构建虚拟场景,可自定义物体属性(形状、材质)、环境参数(摩擦系数、重力)及任务类型(抓取、旋转);
- 数据优势:可自动生成带标注的结构化数据(如手指关节角度、物体运动轨迹、接触力大小),且支持“无限迭代”——同一任务可在不同场景中重复生成数据;
- 核心目标:为强化学习、模仿学习等算法提供“海量预训练数据”,减少真实世界交互的样本需求。
典型案例
- GraspM3:针对Shadow多指灵巧手,生成覆盖8152个物体的数百万条抓取轨迹,包含不同姿态、不同力度下的抓取策略,支持通用抓取技能训练;
- DexGraspNet:包含132万条抓取数据,覆盖133类、5355个物体,重点标注了“手指-物体接触点”信息,用于训练多指手的精细抓取策略;
- GRPtopia:城市级仿真平台,提供89个功能场景(如厨房、办公室)和10万条高质量交互数据(如开门、整理桌面),支持复杂场景下的灵巧操作学习。
优劣势
- 优势:数据生成效率极高(短时间内生成百万级样本)、可控制变量(如单独测试“物体重量”对抓取的影响)、无真实世界实验风险(如避免机械臂碰撞损坏);
- 劣势:存在“仿真-现实差距(Sim-to-Real Gap)”——虚拟环境的物理参数(如摩擦、形变)无法完全匹配真实世界,导致仿真中训练的技能迁移到真实机器人时性能下降;且对复杂物体(如布料、线缆)的模拟精度不足,数据真实性受限。
二、基于人类演示的数据收集(Human Demonstration-Based Data Collection)
核心逻辑
直接从人类操作行为中提取数据,利用人类在物理交互中的“先验知识”(如握持姿势、用力习惯)指导机器人学习,减少对仿真数据的依赖。
技术特点
- 数据来源:通过摄像头、数据手套、触觉传感器等设备,记录人类完成灵巧操作的过程(如手指运动轨迹、手部发力模式、视觉-触觉反馈);
- 关键优势:数据来自真实物理环境,天然包含“人类级”的操作智慧(如抓取易碎品时的轻力度控制),可缓解“仿真-现实差距”;
- 技术路径:分为“直接捕捉”(如用动作捕捉设备记录手指关节角度)和“间接提取”(如从互联网视频中解析人类手部运动规律)。
典型案例
- Videodex:从互联网公开视频(如烹饪、手工制作)中提取人类手部运动和物体交互特征(如“握刀姿势”与“切割方向”的关联),无需专用设备即可获取海量非结构化演示数据;
- VTDexManip:通过视觉-触觉融合系统,记录人类完成10项日常任务(如拧瓶盖、叠毛巾)的过程,包含182个物体的“视觉图像+指尖触觉压力”数据,用于训练机器人的触觉感知与操作协同能力。
优劣势
- 优势:数据贴近真实操作场景,包含人类对复杂物体的处理经验(如如何抓取柔软布料),且无需昂贵机器人硬件即可收集;
- 劣势:存在“人类-机器人差距(Human-to-Robot Gap)”——人类手与机器人手的结构、自由度、运动范围差异极大(如人类手指更纤细、关节更灵活),导致人类演示的动作无法直接被机器人复现;此外,人类操作的“主观性”(如不同人抓取同一物体的姿势不同)可能引入数据噪声。
三、基于遥操作演示的数据收集(Teleoperation-Based Data Collection)
核心逻辑
通过“人类-机器人”共享控制系统,由人类远程操控机器人完成灵巧操作,直接记录机器人在真实环境中的交互数据(如关节角度、末端执行器位姿),兼顾“数据真实性”与“机器人运动约束”。
技术特点
- 操作流程:人类通过输入设备(如VR手柄、数据手套、力反馈操纵杆)控制机器人动作,机器人端的传感器(摄像头、触觉传感器)实时向人类反馈环境信息(如视觉画面、接触力大小),形成“感知-决策-执行”闭环;
- 数据优势:数据直接以“机器人可执行的格式”记录(如关节角度、力矩),无需适配转换;且来自真实环境与机器人的交互,完全避免“仿真-现实差距”和“人类-机器人差距”;
- 核心目标:将人类的操作智慧(如应对突发情况的调整策略)直接转化为机器人的技能数据。
典型案例
- Open-TeleVision:结合VR设备实现沉浸式遥操作,人类通过视觉反馈感知机器人视角,操控多指灵巧手完成精细任务(如分拣小零件),数据包含机器人关节运动和物体姿态变化;
- GR00T:利用视觉捕捉设备(如Vision Pro)记录人类手臂和手部运动,实时映射到机器人,支持双臂协同操作(如“一手固定物体、另一手操作工具”)的数据收集;
- Mobile ALOHA:针对移动机器人,通过全身遥操作系统记录双臂在动态场景中的协作数据(如开门、递物),控制频率适配真实世界操作需求。
优劣势
- 优势:数据直接来自“机器人-真实环境”交互,无虚实差距;且遵循机器人运动约束(如关节活动范围),技能可直接迁移;
- 劣势:现有系统多依赖“视觉反馈”,缺乏力和触觉反馈(人类无法感知机器人与物体的接触力度),导致“人类-机器人耦合弱”,难以传递人类的“触觉经验”(如抓取鸡蛋时的力度控制);此外,多指灵巧手的高自由度(20+关节)运动捕捉精度不足,系统延迟较高(数十毫秒),影响数据质量。
总结:三类范式的核心对比与应用逻辑
论文明确指出,三类数据收集范式各有侧重,共同构成灵巧操作的数据基础:
- 仿真数据是“量的保障”:快速生成大规模数据,适合预训练和简单技能学习(如基础抓取);
- 人类演示数据是“质的补充”:提供真实世界的操作智慧,适合复杂场景的技能迁移(如工具使用);
- 遥操作数据是“虚实结合的关键”:兼顾真实性与适配性,适合高精度技能训练(如精细力控)。
当前的核心挑战是“如何融合三类数据的优势”——例如,用仿真数据解决样本量问题,用人类演示数据优化策略合理性,用遥操作数据校准真实世界适配性。未来的发展方向是构建“多模态融合的遥操作系统”,通过力触觉反馈提升数据质量,同时扩大多指灵巧手的数据覆盖范围。
机器人灵巧操作技能的学习框架
根据该论文,机器人灵巧操作技能的学习框架是将数据转化为可执行技能的核心环节,目前主流框架可分为两大类——模仿学习(Imitation Learning, IL) 和强化学习(Reinforcement Learning, RL)。两类框架分别从“模仿示范”和“自主试错”两个路径实现技能学习,各有技术分支、典型方法及适用场景。以下是详细阐述:
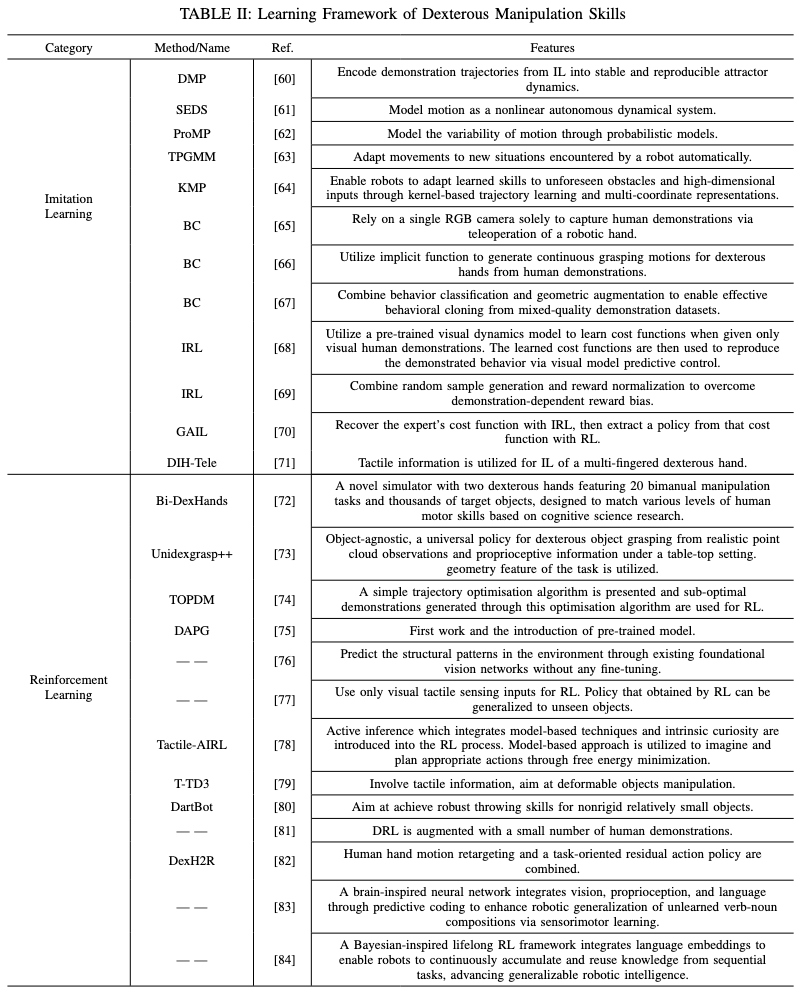
一、模仿学习(Imitation Learning, IL)
核心逻辑
通过学习人类或专家的演示数据(如操作轨迹、动作序列),让机器人“复制”示范者的操作模式,无需手动设计奖励函数,核心是“从数据中提取技能规律”。
技术分支及典型方法
模仿学习可分为概率建模类和深度学习类,分别适用于简单轨迹复现和复杂交互任务:
-
概率建模类模仿学习
- 核心思路:用概率模型(如高斯混合模型GMM)拟合人类演示的轨迹数据,将技能转化为可参数化的数学模型,再通过优化算法生成稳定的复现轨迹。
- 典型方法:
- DMP(动态运动基元):将演示轨迹编码为“吸引子动力学系统”,确保机器人在干扰下仍能稳定复现动作(如固定轨迹的抓取);
- SEDS(稳定动力学系统估计):用非线性系统建模运动,自动适应环境微小变化(如工件位置轻微偏移时调整轨迹);
- ProMP(概率运动基元):通过概率分布描述动作的不确定性,支持同一任务的多样化复现(如用不同手势抓取同一物体)。
- 特点:需少量数据即可训练,数学可解释性强(能明确轨迹生成的逻辑),但仅适用于简单、单一场景的轨迹复现(如固定路径的装配),无法处理涉及视觉-触觉交互的复杂任务(如抓取柔软物体时的力度调整)。
-
深度学习类模仿学习
- 核心思路:用深度神经网络直接学习“状态-动作”映射(如输入物体视觉图像,输出手指关节角度),从大规模演示数据中提取抽象技能。
- 典型方法:
- BC(行为克隆):通过监督学习让网络模仿人类演示的动作(如从人类抓取视频中学习手指开合角度);
- IRL(逆强化学习):先从演示数据中反推“专家的奖励函数”(如“抓取成功”的隐含评价标准),再用强化学习优化策略;
- GAIL(生成对抗模仿学习):通过对抗训练让机器人动作分布接近人类演示(类似GAN的“生成器-判别器”逻辑),提升技能的逼真度。
- 特点:可处理高维输入(如视觉、触觉多模态数据),适用于复杂交互任务(如工具使用),但性能完全依赖演示数据的质量——若数据覆盖范围不足(如未包含“物体倾斜”场景),机器人在新场景中易失效;且无法超越演示者的技能水平(“学不会更好”)。
二、强化学习(Reinforcement Learning, RL)
核心逻辑
让机器人通过与环境“自主交互试错”,基于奖励信号(如“成功抓取得正奖励,物体掉落得负奖励”)不断优化动作策略,核心是“从反馈中自主改进技能”。
技术特点及典型方法
强化学习不依赖演示数据,可通过探索学习超越人类演示的技能,但需解决“高自由度多指手的动作空间复杂”“奖励信号稀疏”等问题。目前的技术发展聚焦于提升效率和适应性:
-
基础框架与改进方向
- 核心挑战:多指灵巧手的自由度高(20+关节),动作空间呈指数级扩大,导致“无效探索多、样本效率低”(通常需百万级交互才能学会一项技能);且复杂任务(如装配)的奖励信号稀疏(仅完成时才有奖励),机器人难以判断中间动作的优劣。
- 改进方法:
- 融合先验知识:用少量人类演示初始化策略(如DAPG方法),减少无效探索;
- 多模态感知辅助:引入触觉、力反馈(如TactileAIRL框架),通过接触信息判断动作有效性(如“指尖触觉压力适中”对应中间奖励);
- 预训练模型迁移:用大规模互联网数据预训练视觉/语言模型(如RT-X),帮助机器人快速理解新任务(如通过语言“拧瓶盖”定位目标动作)。
-
典型应用案例
- T-TD3:结合触觉先验信息,让机器人通过强化学习掌握变形物体(如布料、海绵)的稳定抓取——用触觉反馈判断“是否抓牢”,动态调整手指力度;
- DartBot:融合触觉探索与强化学习,实现非刚性物体(如软球)的稳定投掷——通过触觉感知物体弹性,优化投掷角度和力度;
- Helix框架(概念性):模仿人类“快速反应+慢速推理”双系统,将复杂任务拆分为子技能(如“抓取→移动→放置”),用强化学习优化子技能的协同逻辑,提升长序列任务(如“准备餐食”)的完成度。
三、两类框架的对比与协同趋势
| 维度 | 模仿学习(IL) | 强化学习(RL) |
|---|---|---|
| 数据依赖 | 必须依赖高质量演示数据 | 可无需演示数据,依赖环境交互反馈 |
| 学习效率 | 数据量足够时收敛快(“学现成”) | 需大量交互试错,样本效率低(“自己悟”) |
| 技能上限 | 无法超越演示者水平 | 可通过探索学习超越人类演示的技能 |
| 适用场景 | 结构化场景、动作模式固定(如固定路径装配) | 非结构化场景、需动态调整(如抓取未知物体) |
论文指出,单一框架难以应对灵巧操作的复杂性,“模仿学习+强化学习”的融合是未来趋势:例如,先用模仿学习从人类演示中获取基础技能(如“握笔”的初始手势),再用强化学习在交互中优化细节(如根据笔尖压力调整握力),兼顾学习效率和技能适应性。
总结:灵巧操作学习框架的核心目标
两类框架的发展均围绕一个核心目标——让机器人在高自由度、多接触的复杂场景中,实现“稳定、高效、可泛化”的灵巧操作:
- 模仿学习是“站在人类肩膀上”,快速获取基础技能,但需解决“数据覆盖不足”和“技能固化”问题;
- 强化学习是“自主探索突破”,可适应新场景,但需提升样本效率和安全性(避免试错中损坏物体或自身)。
未来的关键方向是结合两者优势,并融入多模态感知(如触觉、力反馈)和先验知识(如人类操作常识),让多指灵巧手既能“模仿人类经验”,又能“自主优化创新”。
机器人灵巧操作的挑战
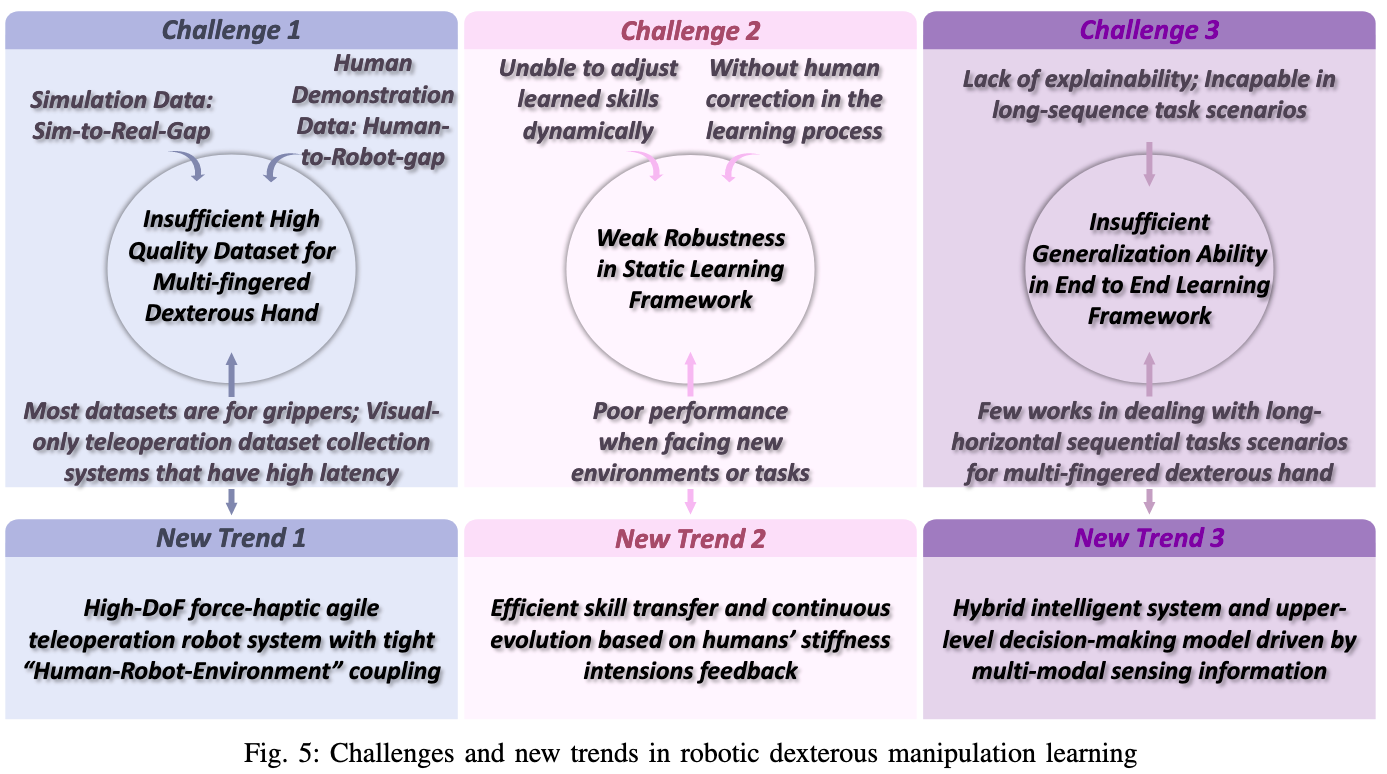
根据论文,机器人灵巧操作虽经历多阶段发展,但在实现类人灵巧交互的过程中仍面临三大核心挑战;针对这些挑战,论文结合技术演进规律提出了三大对应趋势。以下是具体阐述:
一、开放挑战(Open Challenges)
挑战1:多指灵巧手高质量数据集不足
数据是灵巧操作学习的“基石”,但当前数据收集仍存在多重瓶颈,无法支撑多指灵巧手的技能学习需求:
- 仿真数据的“仿真-现实差距(Sim-to-Real Gap)”:仿真平台(如GraspM3、DexGraspNet)虽能生成百万级数据,但虚拟环境的物理参数(如摩擦系数、物体形变模型)与真实世界存在偏差,导致仿真中训练的技能(如抓取力度控制)迁移到真实机器人时性能大幅下降;且对变形物体(如布料)、柔性物体(如海绵)的仿真精度不足,数据真实性受限。
- 人类演示数据的“人类-机器人差距(Human-to-Robot Gap)”:人类演示数据(如Videodex、VTDexManip)虽来自真实环境,但人类手与机器人手的结构差异极大(如人类手指更纤细、关节更灵活,而Shadow Hand存在驱动箱限制活动范围),导致人类的精细动作(如指尖捏取)无法直接被机器人复现,技能迁移效率低。
- 遥操作数据的“弱耦合与低敏捷性”:现有遥操作系统(如Open-TeleVision、GR00T)虽能直接获取机器人与真实环境的交互数据,但存在局限:① 多数依赖视觉反馈,缺乏力/触觉反馈,无法传递人类的“触觉经验”(如抓取鸡蛋时的力度感知);② 多指灵巧手的高自由度(20+关节)运动捕捉精度不足;③ 系统延迟高(数十毫秒),无法满足精细操作(如拧动微小螺丝)的敏捷性需求。
- 数据载体局限:现有数据集多基于二指夹持器,针对多指灵巧手的高自由度、多接触交互数据(如多指协同拧瓶盖)极度稀缺。
挑战2:静态学习框架鲁棒性弱
当前主流学习框架(模仿学习、强化学习)均为“静态学习”模式,无法动态适应环境变化,导致技能稳定性差:
- 技能无法动态调整:现有框架仅能从固定数据集提取技能(如用一批“抓取杯子”的数据训练后,无法根据杯子材质变化调整力度),面对新场景(如杯子沾水变滑)时性能骤降。
- 人类监督与学习过程“弱耦合”:虽有研究尝试引入人类反馈(如DexH2R的人类手运动重定向),但反馈多为“离线修正”(如训练后调整策略),无法实时融入学习过程——人类无法在机器人操作时“实时指导”(如通过体感反馈告知“力度过大”),导致技能难以贴合人类需求。
- 泛化能力依赖数据集覆盖度:当任务或环境超出训练数据范围(如训练了抓取圆形物体,遇到三角形物体时),机器人因缺乏“动态推理”能力,操作成功率大幅下降。
挑战3:端到端学习框架泛化能力不足
当前主流的“端到端学习”(从感知直接映射到动作)难以应对长序列、多步骤的复杂任务,且可解释性差:
- 长序列任务适配难:端到端框架将操作视为“单一黑箱映射”(如输入“做饭”的视觉信息,直接输出手指动作),但长序列任务(如“洗菜→切菜→炒菜”)需拆分步骤并动态切换技能,端到端模型无法学习“子技能组合逻辑”,易出现步骤混乱(如先切菜再洗菜)。
- 技能组合研究滞后:人类完成复杂任务时,会自然将其拆分为“子技能”(如“握刀→下刀→移动食材”)并灵活组合,但现有研究仅在二指夹持器和简单机械臂上探索技能组合(如LEGION框架),针对多指灵巧手的子技能拆分(如“拇指固定+食指发力”)与组合逻辑(如切换握笔姿势适应书写角度)几乎未涉及。
- 可解释性差:端到端模型的决策过程(如“为何用该力度抓取”)无法追溯,一旦出错难以排查原因,限制其在高可靠性场景(如医疗手术)的应用。
二、新趋势(New Trends)
针对上述挑战,论文结合技术可行性与领域需求,提出三大发展方向:
趋势1:构建高自由度力触觉敏捷遥操作系统,解决数据质量瓶颈
核心是通过硬件与感知升级,获取“无差距、高保真”的多指灵巧手交互数据:
- 硬件层面:开发高自由度(20+关节)遥操作设备(如柔性数据手套、力反馈操纵杆),精确捕捉人类手指的细微动作(如指尖弯曲角度);优化机器人驱动系统(如微型电机、柔性传动),缩小与人类手的结构差异。
- 感知层面:融合视觉、力、触觉多模态反馈(如在遥操作中向人类传递机器人指尖的压力信号),实现“人类-机器人-环境”的紧密耦合——例如,人类操控时能“感知”机器人抓取物体的硬度,从而调整发力方式,提升数据的“力控精细度”。
- 效率优化:降低遥操作系统延迟(目标控制在毫秒级),提升操作敏捷性,适配快速交互任务(如接住掉落的物体)。
- 预期价值:同时解决“仿真-现实差距”和“人类-机器人差距”,为多指灵巧手提供高质量、可直接使用的交互数据。
趋势2:将人类反馈动态融入学习循环,提升框架鲁棒性
核心是打破“静态学习”模式,让机器人在学习中实时接收人类指导,动态调整技能:
- 反馈量化:通过生理信号(如人体肌肉刚度、眼动轨迹)捕捉人类意图——例如,当人类观察到机器人抓取不稳时,肌肉无意识紧绷,传感器可捕捉这一信号并转化为“需要增加握力”的指令。
- 实时耦合:构建“人类在环(Human-in-the-Loop)”的学习框架,人类反馈可实时修正机器人策略(如训练中通过脑机接口传递“调整手指角度”的信号),而非仅在训练后离线优化。
- 预期价值:让机器人技能“随人类需求动态进化”,提升面对新环境(如抓取未知材质物体)时的适应能力。
趋势3:模拟人类认知的“双系统”框架,提升长序列任务泛化能力
核心是借鉴人类“快速反应+慢速推理”的认知机制,拆分复杂任务并优化技能组合:
- 框架设计:构建“双系统协同”架构——
- 系统1(快速反应):负责基础子技能的快速执行(如“抓取”“移动”),基于强化学习优化,确保动作敏捷性;
- 系统2(慢速推理):负责任务拆分与子技能调度(如将“准备咖啡”拆分为“拿杯子→接水→放糖”),基于语言模型、逻辑推理实现,确保步骤合理性。
- 技能库建设:为多指灵巧手构建“子技能库”(如“拇指-食指捏取”“多指包裹抓取”),通过元学习(Meta-Learning)实现子技能的快速调用与组合(如根据物体形状自动选择“捏取”或“包裹”)。
- 预期价值:突破端到端框架的局限,让机器人在长序列任务中既能“高效执行子技能”,又能“合理规划步骤”,提升复杂场景的泛化能力。
总结
开放挑战的核心是“从‘基础操作’到‘类人灵巧交互’的能力断层”——数据质量、学习鲁棒性、任务泛化共同制约着多指灵巧手的性能;而新趋势的本质是“硬件-数据-算法的协同进化”:通过遥操作解决数据真实性问题,通过人类反馈解决学习动态性问题,通过认知模拟解决任务复杂性问题。论文强调,这些趋势的落地将推动机器人灵巧操作从“实验室演示”走向“实际应用”(如家庭服务、医疗辅助),并加速类人具身智能的实现。