【论文阅读】BEVFusion: A Simple and Robust LiDAR-Camera Fusion Framework
标题:BEVFusion: A Simple and Robust LiDAR-Camera Fusion Framework
作者:Tingting Liang1∗ Hongwei Xie2∗ Kaicheng Yu2∗ Zhongyu Xia1 Zhiwei Lin1 Yongtao Wang1§ Tao Tang2&3 Bing Wang2 Zhi Tang1 (阿里和北大的大佬们)
motivation:
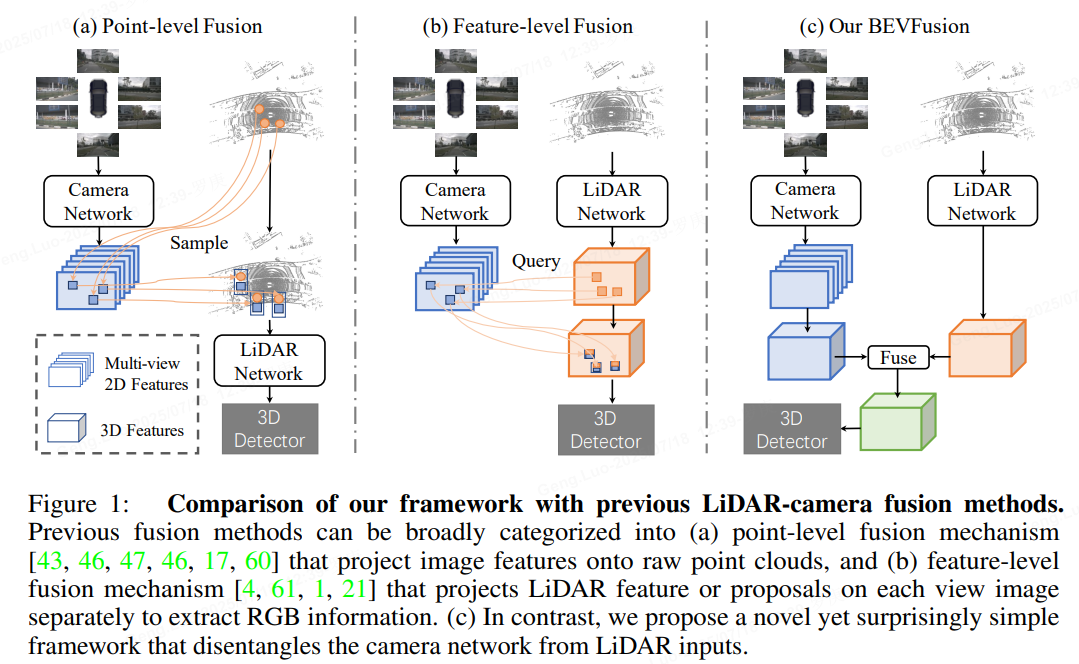
作者觉得当前使用点云特征去查询图像特征的模式会在点云失效的情况下整体失败,导致错误发生。于是作者在想把点云特征和图像特征单独处理,行成了BEVFusion,并建立了这种融合模式的检测架构。架构改进如下:
methods:
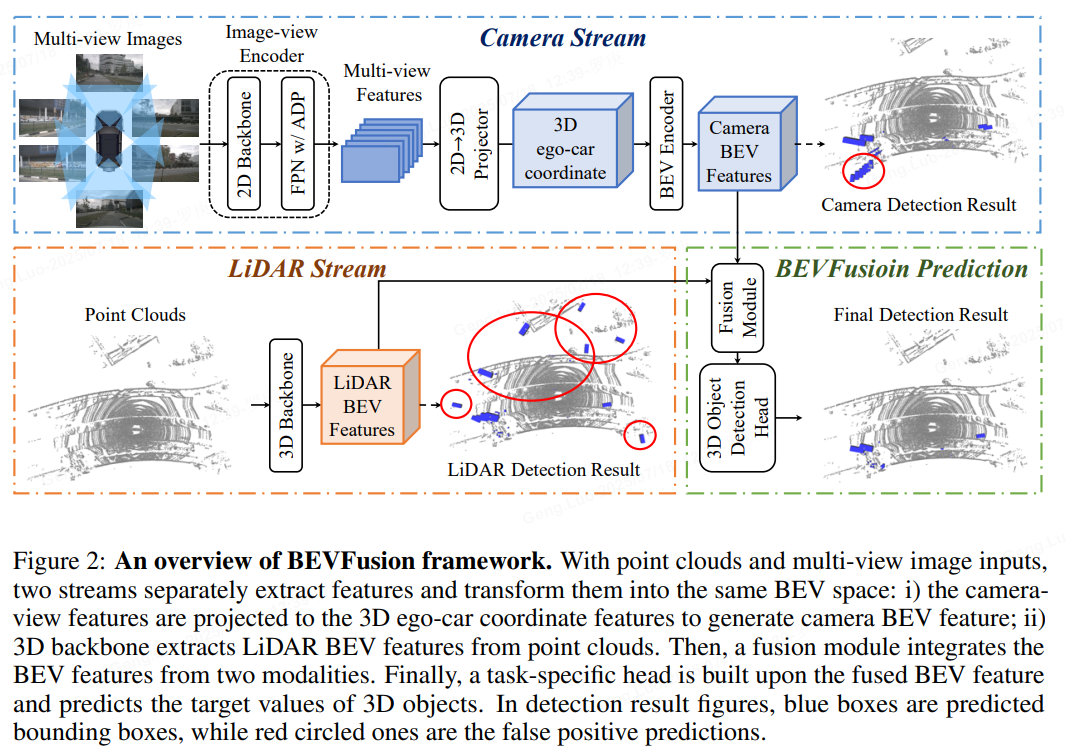
- Camera Stream:
就是常规的图像特征提取->2D to 3D->编码;这里重点在于2D to 3D,作者采用的是LSS的方法。
- Lidar Stream
作者对比了3种方法:PointPillars, CenterPoint and TransFusion
- Fusion
融合就很简单了,如下图所示。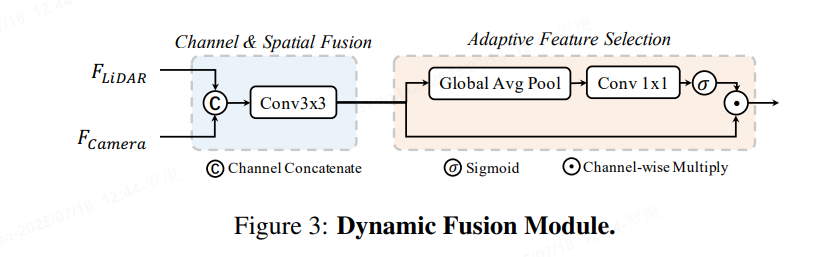
- Head
作者对比了3种HEAD: anchor-based, anchor-free-based, and transform-based 。这个也比较好理解就不多说了。
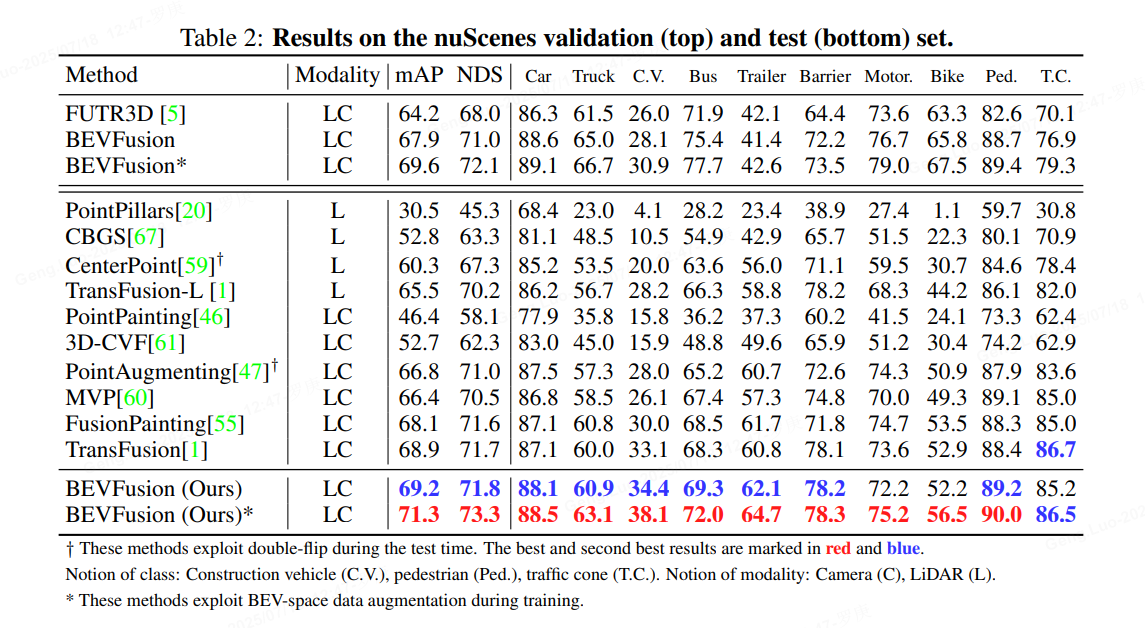
experiments:
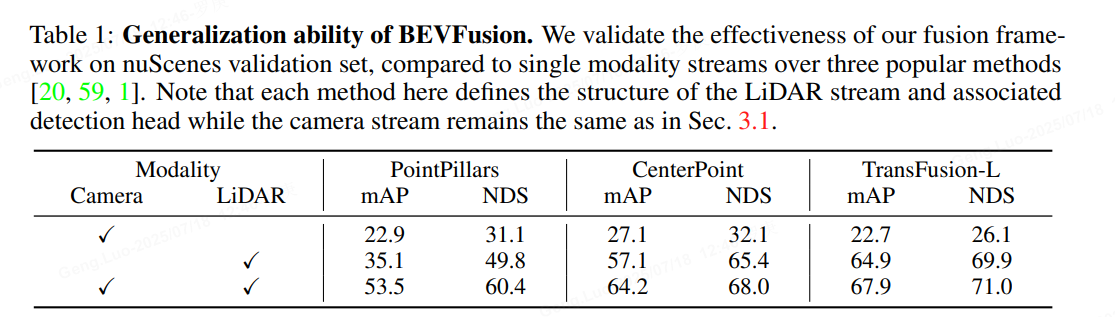
3种模式下的提去方式和head模式如上图,centerpoint要好很多;
厉害吧,我们的自驾是用的改进版本的。不错不错;
【完结】